基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法
本发明涉及一种车辆控制方法,尤其涉及一种基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法。
背景技术:
1、自动驾驶的兴起,在自动驾驶领域大多数人都把控制算法研究放到传统的主动前轮转向,也就是前轮控制方向,而对于其他转向控制研究相当较少。而四轮差速底盘同样可以应用于自动驾驶。
2、对于传统的转向控制算法主要包括lqr(线性二次型调节器),纯跟踪算法,滑模控制和mpc(模型预测控制算法)等,mpc由于其跟踪性能对车辆的预测模型的精度非常敏感,并且模型是非线性的,预测控制对计算性能的有非常高的要求,因此mpc算法不适合高速驾驶环境。lqr算法容易设计,但是在曲率变化较大的路段时,会使得跟踪误差变大而使跟踪失败。滑模控制的主要缺点是其不连续的开关特性将会引起控制系统抖动。
3、因此,为了解决上述问题,亟需提出一种新的技术手段加以解决。
技术实现思路
1、本发明的目的是提供一种基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法用以解决上述技术问题。
2、本发明提供的一种基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法,包括以下步骤:
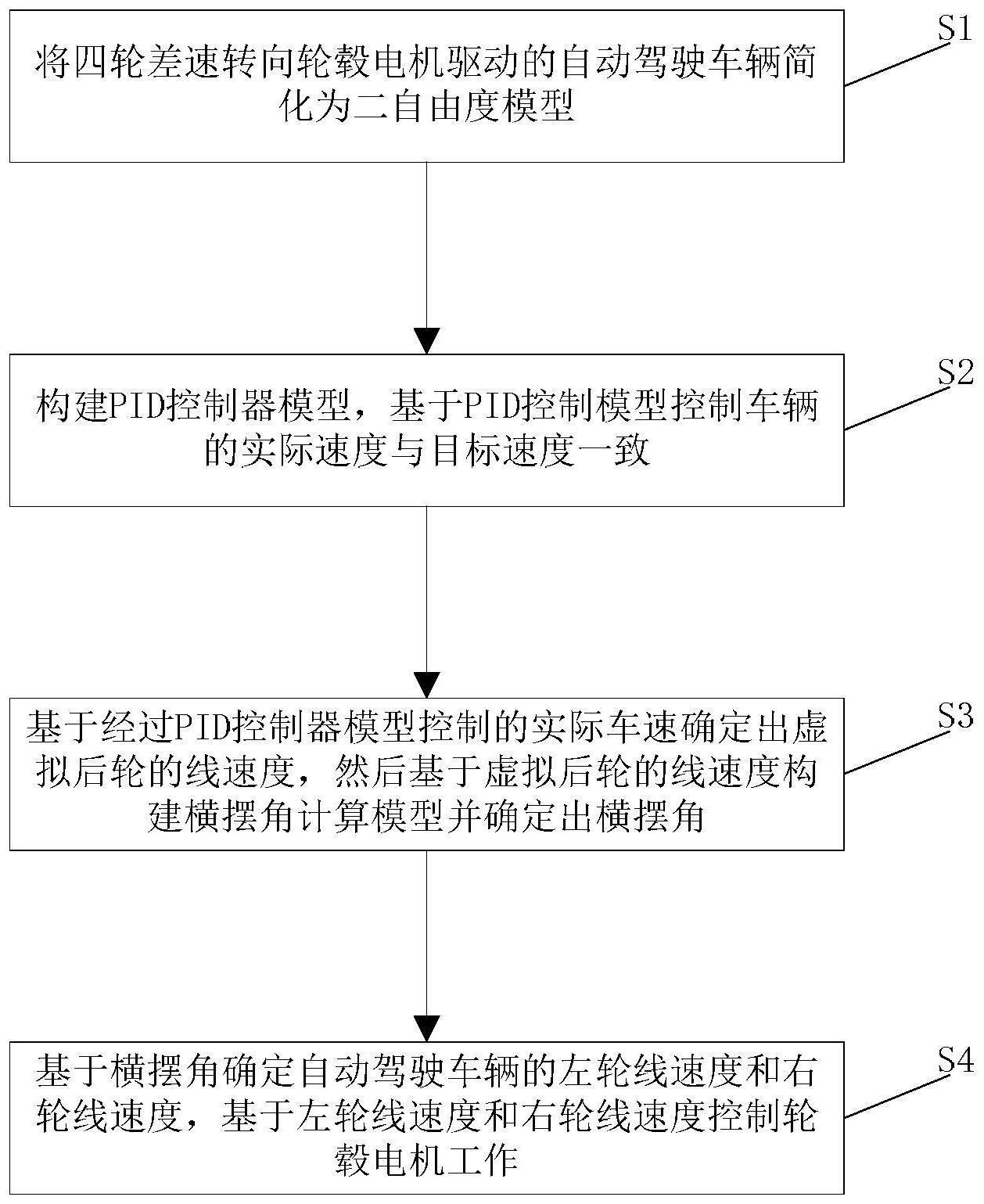
3、s1.将四轮差速转向轮毂电机驱动的自动驾驶车辆简化为二自由度模型,具体为:将自动驾驶车辆的左前轮和右前轮等效为位于左前轮和右前轮之间的中心点的虚拟前轮,将自动驾驶车辆的左后轮和右后轮等效为位于左后轮和右后轮之间的中心点的虚拟后轮;
4、s2.构建pid控制器模型,基于pid控制模型控制车辆的实际速度与目标速度一致;
5、s3.基于经过pid控制器模型控制的实际车速确定出虚拟后轮的线速度,然后基于虚拟后轮的线速度构建横摆角计算模型并确定出横摆角;
6、s4.基于横摆角确定自动驾驶车辆的左轮线速度和右轮线速度,基于左轮线速度和右轮线速度控制轮毂电机工作。
7、进一步,步骤s2中,pid控制器模型为:
8、
9、其中,e(t)为车辆的目标车速与实际车速之间的误差,e(t)=vtar-vact,vact为车辆的实际车速,vtar为车辆的目标车速,△t表示误差采样时间间隔,e(j)表示第j个采样时刻的目标车速与实际车速之间的误差。
10、进一步,所述横摆角计算模型为:
11、
12、其中,l表示车辆的左后轮与右后轮之间的轴距,vr为虚拟后轮的线速度,δf表示前轮偏角。
13、进一步,通过如下方法确定前轮偏角δf:
14、基于纯跟踪算法确定预锚距离lw;
15、构建前轮偏角δf:
16、
17、其中:θ为虚拟后轮的滚动方向与虚拟前轮的质心和虚拟后轮质心之间的夹角。
18、进一步,基于横摆角确定自动驾驶车辆的左轮线速度和右轮线速度具体包括:
19、以虚拟后轮的质心为原点建立车辆坐标系oxy以及建立大地坐标系oxy,其中坐标系oxy的纵轴y为虚拟后轮的轴向,并虚拟后轮的前进方向为x轴;
20、确定虚拟后轮和虚拟前轮的x轴的线速度分量:
21、vfx=vf cosδf,vf为虚拟前轮线速度,vfx为虚拟前轮的在oxy坐标中x轴的线速度分量;
22、设定自动驾驶车辆为刚体模型,因此:
23、vrx=vfx
24、vrx为虚拟后轮在oxy坐标中x轴的线速度分量;
25、计算自动驾驶车辆的左轮线速度vl和右轮线速度vr:
26、
27、
28、其中:r为轮毂电机的半径,rt为轮胎半径。
29、本发明的有益效果:通过本发明,基于纯跟踪算法确定出前轮偏角以及车辆的横摆角,其控制参数较小,对外界干扰的鲁棒性较好,而且结合pid控制器模型进行实际车速跟踪,能够很好的模仿司机的驾驶行为,并能够对车速进行良好的跟踪控制,对行驶路径要求低,整个控制算法简单,适应能力强。
技术特征:
1.一种基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法,其特征在于:步骤s2中,pid控制器模型为:
3.根据权利要求2所述基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法,其特征在于:所述横摆角计算模型为:
4.根据权利要求3所述基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法,其特征在于:通过如下方法确定前轮偏角δf:
5.根据权利要求4所述基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法,其特征在于:基于横摆角确定自动驾驶车辆的左轮线速度和右轮线速度具体包括:
技术总结
本发明提供的一种基于轮毂电机四轮驱动的自动驾驶车辆差速转向控制方法,包括以下步骤:S1.将四轮差速转向轮毂电机驱动的自动驾驶车辆简化为二自由度模型,具体为:将自动驾驶车辆的左前轮和右前轮等效为位于左前轮和右前轮之间的中心点的虚拟前轮,将自动驾驶车辆的左后轮和右后轮等效为位于左后轮和右后轮之间的中心点的虚拟后轮;S2.构建PID控制器模型,基于PID控制模型控制车辆的实际速度与目标速度一致;S3.基于经过PID控制器模型控制的实际车速确定出虚拟后轮的线速度,然后基于虚拟后轮的线速度构建横摆角计算模型并确定出横摆角;S4.基于横摆角确定自动驾驶车辆的左轮线速度和右轮线速度,基于左轮线速度和右轮线速度控制轮毂电机工作。
技术研发人员:邓召学,赵双双,魏宏杰
受保护的技术使用者:重庆交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!