一种基于导轨拉紧的复杂曲面爬壁机器人
本发明涉及机器人,特别涉及一种复杂曲面应用的爬壁机器人。
背景技术:
1、目前,常见的爬壁机器人按照移动方式主要有履带式、轮式、足式与混合式爬壁机器人,主要通过真空吸附、磁吸附、推力吸附等方式与壁面形成接触,上述吸附方式对于壁面的表面具有较高的要求,如表面光滑、表面有磁性等。基于机械力抓持吸附方法的爬壁机器人在足部增加倒钩等结构实现吸附,负载大但行动缓慢。新型的爬壁机器人应尽可能同时满足大负载与快速运动的特性,同时对于复杂曲面与角度具有较高的适应性。
技术实现思路
1、本发明的目的是为了克服现有技术中的不足,提供一种基于导轨拉紧的复杂曲面爬壁机器人,本发明通过设计拉紧结构,使机器人能通过轨道获得更大的吸附力与负载能力,同时通过轮式驱动方式获得更高的运动速度,避免复杂的控制方案;采用交叉导轨布置于曲面之上,解决了轨道式机器人运动路径单一的问题,避免了对壁面表面的严格要求。本发明为在复杂曲面的爬壁机器人提供了新的设计思路,提高了结构的负载能力,避免了复杂的控制方案,提高了可移动性,对于爬壁机器人领域具有重要意义。
2、本发明的目的是通过以下技术方案实现的:
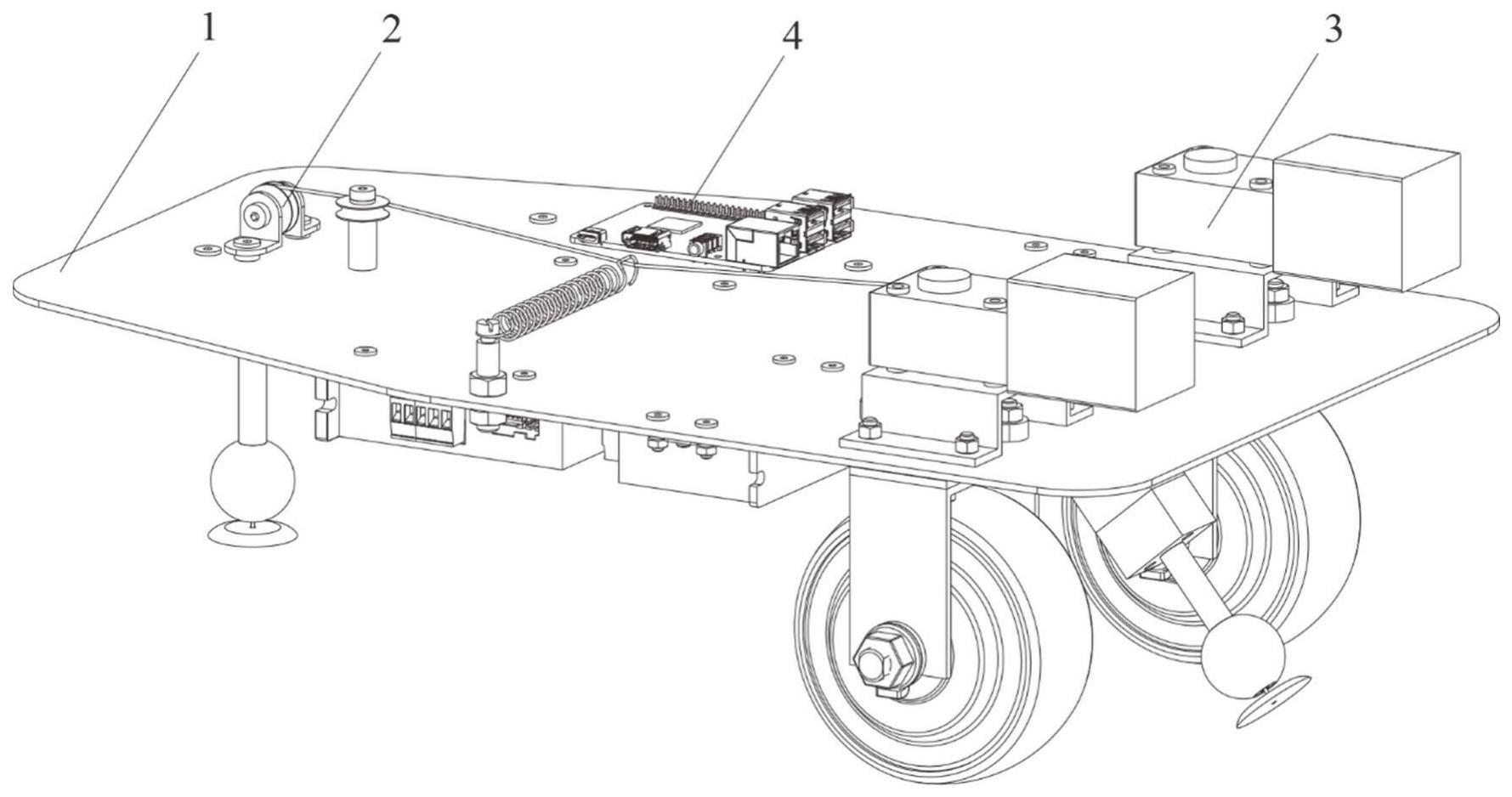
3、一种基于导轨拉紧的复杂曲面爬壁机器人,用于在工作壁面爬行,由车身、拉紧装置、驱动装置、控制系统组成;控制系统由单片机、轮毂电机驱动器、步进电机驱动器、电源组成;所述拉紧装置、驱动装置、单片机、轮毂电机驱动器、步进电机驱动器、电源与车身连接;
4、所述单片机、轮毂电机驱动器、步进电机驱动器与电源电连接。
5、进一步的,所述拉紧装置由角码、第一滑轮、第二滑轮、第三滑轮、轴套、轴肩螺钉、前导杆部分、后导杆部分、拉簧支柱、拉簧、钢丝绳组成;
6、所述车身上设置有一组轴线竖直的第一滑轮、一组轴线水平的第二滑轮和拉簧支柱,第二滑轮通过角码、轴肩螺钉、垫片、螺母连接至车身上表面,所述第一滑轮通过轴套、轴肩螺钉、螺母连接至车身上表面,所述拉簧支柱通过一对螺母固定至车身上表面;
7、所述前导杆部分与后导杆部分分别设置于车身下方的前后两侧,所述前导杆部分由前导杆连接块、前导杆、不锈钢球组成,所述前导杆连接块通过紧固件固定至车身下表面,所述前导杆的两端分别与前导杆连接块、不锈钢球螺纹连接;
8、所述后导杆部分由活动铰链、后导杆连接块、后导杆、不锈钢球组成,所述活动铰链的一端通过紧固件连接至车身下表面,活动铰链的另一端与后导杆连接块固定,所述后导杆的两端分别与导杆连接块与不锈钢球螺纹连接;
9、所述活动铰链的转轴上活动连接有一只第三滑轮;
10、所述前导杆连接块、前导杆、不锈钢球、活动铰链、后导杆连接块、后导杆内均设有用于钢丝绳的通孔,所述前导杆连接块、活动铰链连接的车身上也相应的设有通孔;
11、所述钢丝绳穿过车身、前导杆部分及后导杆部分的通孔,并通过各个滑轮改变受力方向;所述拉紧滑片分别布置在钢丝绳的两端;所述拉簧的一端与拉簧支柱连接,另一端与钢丝绳活动连接,并使钢丝绳处于拉紧状态。
12、进一步的,所述驱动装置包括相同的两部分,由步进电机、步进电机支架、卧式轴承座、推力轴承、转向支座、轮胎支架、轮毂电机组成;所述步进电机支架通过紧固件固定于车身上表面,所述步进电机通过紧固件与步进电机支架固定,所述卧式轴承座通过紧固件固定于车身上表面;所述转向支座的转轴部分与卧式轴承座的孔配合,所述转向支座的转轴部分与步进电机的输出轴通过d形轴孔连接,所述转向支座的平台上表面与车身下表面之间布置推力轴承承压;所述轮毂电机通过轮胎支架连接至转向支座的平台下表面;
13、所述轮毂电机驱动器与轮毂电机电连接,所述步进电机驱动器与步进电机电连接。
14、进一步的,所述工作壁面由倒t型凹槽的曲面导轨与复杂曲面组成,所述曲面导轨与复杂曲面贴合;在运动过程,所述拉紧滑片在钢丝绳的牵引下在曲面导轨的凹槽内滑动通过,所述轮毂电机的轮胎部分与复杂曲面接触滚动。
15、进一步的,所述爬壁机器人通过轮毂电机实现移动,通过步进电机实现转向;所述电源为轮毂电机、步进电机、单片机、轮毂电机驱动器、步进电机驱动器供电,所述单片机通过轮毂电机驱动器控制轮毂电机,通过步进电机驱动器控制步进电机。
16、与现有技术相比,本发明的技术方案所带来的有益效果是:
17、1.本发明的基于导轨拉紧的复杂曲面爬壁机器人通过两个拉紧滑片与钢丝绳实现机械附着,可靠性高,负载大,可搭载各种作业设备,通过加工相应的曲面导轨,可以在各种形状的复杂曲面实现爬壁作业。
18、2.本发明的基于导轨拉紧的复杂曲面爬壁机器人使用双轮驱动,使用拉簧结构提供拉紧力的同时增加结构的自适应能力,保证运动的流畅性与协调性,提高了爬壁机器人的运动速度。
19、3.本发明的基于导轨拉紧的复杂曲面爬壁机器人通过调整拉簧的刚度、预紧力等参数,进而调整轮毂电机与复杂曲面间的摩擦力,可以实现在任意角度的工作壁面上行走。
20、4.本发明的基于导轨拉紧的复杂曲面爬壁机器人通过后导杆部分的活动铰链转动,可以被动自适应地调整机器人的位姿,保证两轮与复杂曲面接触,两滑片在曲面导轨凹槽内,避免复杂的位姿主动调整。
21、5.本发明的基于导轨拉紧的复杂曲面爬壁机器人可以通过轮毂电机与步进电机的共同作用下在轨道交叉处使拉紧滑片进入新方向的轨道,实现变轨操作,保证了爬壁机器人良好的转向特性;通过布置轨道网,可使机器人的工作范围覆盖整个复杂曲面。
22、6.本发明的基于导轨拉紧的复杂曲面爬壁机器人不需要复杂的传感设备,通过运动学分析控制两组步进电机与轮毂电机即可实现爬壁机器人的移动过程。
技术特征:
1.一种基于导轨拉紧的复杂曲面爬壁机器人,用于在工作壁面爬行,其特征在于,由车身(1)、拉紧装置(2)、驱动装置(3)、控制系统组成;控制系统由单片机(4)、轮毂电机驱动器(5)、步进电机驱动器(6)、电源(7)组成;所述拉紧装置(2)、驱动装置(3)、单片机(4)、轮毂电机驱动器(5)、步进电机驱动器(6)、电源(7)与车身(1)连接;
2.根据权利要求1所述的一种基于导轨拉紧的复杂曲面爬壁机器人,其特征在于,所述拉紧装置(2)由角码(21)、第一滑轮(22a)、第二滑轮(22b)、第三滑轮(22c)、轴套(23)、轴肩螺钉(24)、前导杆部分、后导杆部分、拉簧支柱(212)、拉簧(213)、钢丝绳(214)组成;
3.根据权利要求1所述的一种基于导轨拉紧的复杂曲面爬壁机器人,其特征在于,所述驱动装置(3)包括相同的两部分,由步进电机(31)、步进电机支架(32)、卧式轴承座(33)、推力轴承(34)、转向支座(35)、轮胎支架(36)、轮毂电机(37)组成;所述步进电机支架(32)通过紧固件固定于车身(1)上表面,所述步进电机(31)通过紧固件与步进电机支架(32)固定,所述卧式轴承座(33)通过紧固件固定于车身(1)上表面;所述转向支座(35)的转轴部分与卧式轴承座(33)的孔配合,所述转向支座(35)的转轴部分与步进电机(31)的输出轴通过d形轴孔连接,所述转向支座(35)的平台上表面与车身(1)下表面之间布置推力轴承(34)承压;所述轮毂电机(37)通过轮胎支架(36)连接至转向支座(35)的平台下表面;
4.根据权利要求1所述的一种基于导轨拉紧的复杂曲面爬壁机器人,其特征在于,所述工作壁面由倒t型凹槽的曲面导轨(8)与复杂曲面(9)组成,所述曲面导轨(8)与复杂曲面(9)贴合;在运动过程,所述拉紧滑片(211)在钢丝绳(214)的牵引下在曲面导轨(8)的凹槽内滑动通过,所述轮毂电机(37)的轮胎部分与复杂曲面(9)接触滚动。
5.根据权利要求1所述的一种基于导轨拉紧的复杂曲面爬壁机器人,其特征在于,所述爬壁机器人通过轮毂电机(37)实现移动,通过步进电机(31)实现转向;所述电源(7)为轮毂电机(37)、步进电机(31)、单片机(4)、轮毂电机驱动器(5)、步进电机驱动器(6)供电,所述单片机(4)通过轮毂电机驱动器(5)控制轮毂电机(37),通过步进电机驱动器(6)控制步进电机(31)。
技术总结
本发明公开一种基于导轨拉紧的复杂曲面爬壁机器人,用于在工作壁面爬行,由车身、拉紧装置、驱动装置、控制系统组成;控制系统由单片机、轮毂电机驱动器、步进电机驱动器、电源组成;所述拉紧装置、驱动装置、单片机、轮毂电机驱动器、步进电机驱动器、电源与车身连接;单片机、轮毂电机驱动器、步进电机驱动器与电源电连接。本发明的基于导轨拉紧的复杂曲面爬壁机器人通过两个拉紧滑片与钢丝绳实现机械附着,可靠性高,负载大,可搭载各种作业设备,通过加工相应的曲面导轨,可以在各种形状的复杂曲面实现爬壁作业。
技术研发人员:陈焱,宋智斌,魏靖松,张立润,张禹泽,袭凯莉,张霄
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!