车辆转向控制方法、控制器、系统和存储介质与流程
本申请涉及汽车,特别是涉及一种车辆转向控制方法、控制器、系统、存储介质和计算机程序产品。
背景技术:
1、随着汽车技术的发展,目前进入了eps(electronic-power-steering,电动助力转向系统)发展阶段。eps由电动机直接提供助力,助力大小由电控单元控制,具有助力大小可调、路感良好等特点,因此,eps被越来越多的汽车生产厂商应用。
2、随着汽车消费者对汽车操控舒适性和便捷性的需求越来越高,对eps的性能也提出了更高的要求,为满足驾驶员的路感要求,一般通过对eps加入阻尼补偿控制,以确保车辆在行驶过程中的稳定性,但是当前的阻尼补偿控制存在控制误差,难以解决车辆在行驶过程中的转向盘摆振问题,从而导致汽车的操纵稳定性较差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高车辆转向控制的准确性,从而确保车辆在行驶过程的稳定性的车辆转向控制方法、控制器、系统、装置、存储介质和计算机程序产品。
2、第一方面,本申请提供了一种车辆转向控制方法。所述方法包括:
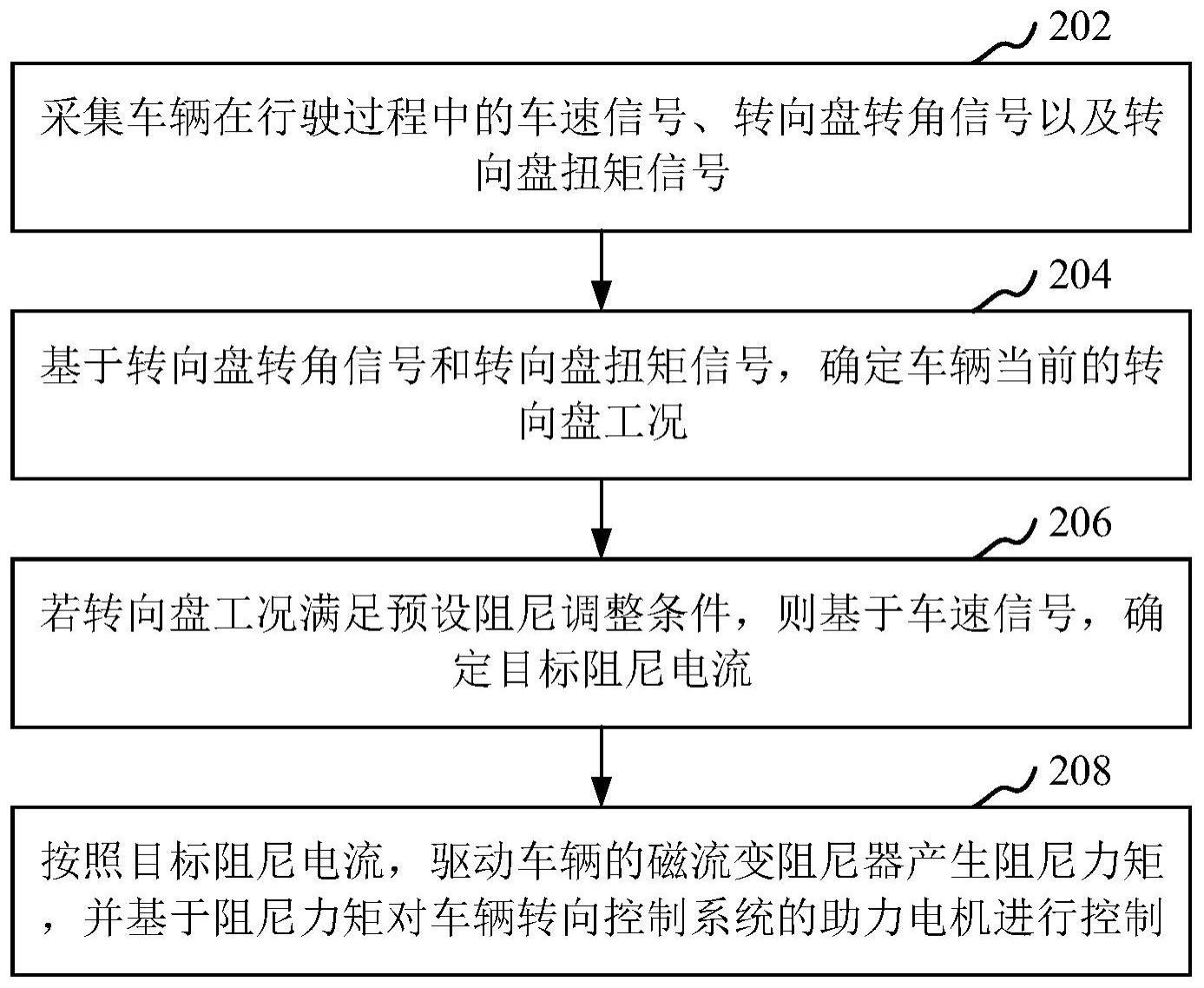
3、采集车辆在行驶过程中的车速信号、转向盘转角信号以及转向盘扭矩信号;
4、基于转向盘转角信号和转向盘扭矩信号,确定车辆当前的转向盘工况;
5、若转向盘工况满足预设阻尼调整条件,则基于车速信号,确定目标阻尼电流;
6、按照目标阻尼电流,驱动车辆的磁流变阻尼器产生阻尼力矩,并基于阻尼力矩对车辆转向控制系统的助力电机进行控制。
7、在其中一个实施例中,转向盘工况包括未转向工况、待转向工况和已转向工况;基于转向盘转角信号和转向盘扭矩信号,确定车辆当前的转向盘工况,包括:
8、若基于转向盘转角信号确定转向盘处于转向盘中位,且基于扭矩信号确定转向盘上未被施加力矩,则确定车辆当前的转向盘工况为未转向工况;
9、若基于转向盘转角信号确定转向盘处于转向盘中位,且基于扭矩信号确定转向盘上已被施加力矩,则确定转向盘工况为待转向工况;
10、若基于转向盘转角信号确定转向盘未处于转向盘中位,则确定转向盘工况为已转向工况。
11、在其中一个实施例中,车辆转向控制方法还包括:
12、基于转向盘转角信号,确定转向盘的转向盘转角,以及基于转向盘扭矩信号,确定转向盘的扭矩;
13、若转向盘转角处于预设转角范围内,则确定转向盘转角处于转向盘中位;
14、若扭矩处于预设扭矩范围内,则确定转向盘未被施加力矩。
15、在其中一个实施例中,若转向盘工况满足预设阻尼调整条件,则基于车速信号,确定目标阻尼电流,包括:
16、若转向盘工况为未转向工况,则确定满足预设阻尼调整条件,并基于车速信号,确定车辆的实时车速,按照实时车速进行查表插值计算,得到目标阻尼电流。
17、在其中一个实施例中,按照目标阻尼电流,驱动车辆的磁流变阻尼器产生阻尼力矩,包括:
18、基于目标阻尼电流确定磁流变阻尼器的设定输入电流,并基于设定输入电流控制磁流变阻尼器的输入电流;
19、在基于设定输入电流控制磁流变阻尼器的输入电流后获取磁流变阻尼器的当前实际输入电流;
20、确定目标阻尼电流和当前实际输入电流之间的电流差;
21、若电流差满足预设的输入电流调控条件,则基于电流差和目标阻尼电流,重新确定磁流变阻尼器的设定输入电流,并返回基于设定输入电流控制磁流变阻尼器的输入电流的步骤,直至电流差不满足电流调控条件时停止,并在停止时驱动车辆的磁流变阻尼器按照当前实际输入电流产生阻尼力矩。
22、在其中一个实施例中,车辆转向控制方法还包括:
23、若转向盘工况不满足预设阻尼调整条件,直接确定目标阻尼电流为零。
24、第二方面,本申请还提供了一种车辆转向控制系统。车辆转向控制系统包括:车速采集单元、转向盘转角及扭矩采集单元、磁流变阻尼器、助力电机,以及控制器;控制器分别与车速采集单元、转向盘转角及扭矩采集单元、磁流变阻尼器以及助力电机连接;
25、车速采集单元,用于采集车辆在行驶过程中的车速信号,并将车速信号发送至控制器;
26、转向盘转角及扭矩采集单元,用于采集车辆在行驶过程中的转向盘转角信号以及转向盘扭矩信号,并将转向盘转角信号以及转向盘扭矩信号发送至控制器;
27、控制器,用于基于转向盘转角信号和转向盘扭矩信号,确定车辆当前的转向盘工况;若转向盘工况满足预设阻尼调整条件,则基于车速信号,确定目标阻尼电流;按照目标阻尼电流,驱动车辆的磁流变阻尼器产生阻尼力矩,并基于阻尼力矩对车辆转向控制系统的助力电机进行控制。
28、第三方面,本申请还提供了一种车辆转向控制装置,所述装置包括:
29、信号采集模块,用于采集车辆在行驶过程中的车速信号、转向盘转角信号以及转向盘扭矩信号。
30、工况确定模块,用于基于转向盘转角信号和转向盘扭矩信号,确定车辆当前的转向盘工况。
31、电流确定模块,用于若转向盘工况满足预设阻尼调整条件,则基于车速信号,确定目标阻尼电流;
32、电机控制模块,按照目标阻尼电流,驱动车辆的磁流变阻尼器产生阻尼力矩,并基于阻尼力矩对车辆转向控制系统的助力电机进行控制。
33、第四方面,本申请还提供了一种控制器。控制器包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述车辆转向控制方法的步骤。
34、第五方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述车辆转向控制方法的步骤。
35、第六方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述车辆转向控制方法的步骤。
36、上述车辆转向控制方法、控制器、系统、装置、存储介质和计算机程序产品,采集车辆在行驶过程中的车速信号、转向盘转角信号以及转向盘扭矩信号;基于转向盘转角信号和转向盘扭矩信号,确定车辆当前的转向盘工况,若转向盘工况满足预设阻尼调整条件,则基于车速信号,确定目标阻尼电流,按照目标阻尼电流,驱动车辆的磁流变阻尼器产生阻尼力矩,并基于阻尼力矩对车辆转向控制系统的助力电机进行控制。在对车辆进行转向控制的过程中,通过在转向盘工况满足预设阻尼调整条件时,基于车速信号确定目标阻尼电流,按照目标阻尼电流,驱动车辆的磁流变阻尼器产生阻尼力矩,并基于阻尼力矩对车辆转向控制系统的助力电机进行控制。其中,在满足阻尼调整条件时,根据车速信号确定目标阻尼电流,从而可以结合车辆在实际行驶过程中确定的目标阻尼电流对磁流变阻尼器的阻尼力矩进行精准调控,提升了车辆转向控制的准确性,有效的消除了转向盘摆振,确保了车辆在行驶过程的稳定性。
技术特征:
1.一种车辆转向控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述转向盘工况包括未转向工况、待转向工况和已转向工况;所述基于所述转向盘转角信号和所述转向盘扭矩信号,确定所述车辆当前的转向盘工况,包括:
3.根据权利要求2所述的方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述若所述转向盘工况满足预设阻尼调整条件,则基于所述车速信号,确定目标阻尼电流,包括:
5.根据权利要求4所述的方法,其特征在于,所述按照所述实时车速进行查表插值计算,得到目标阻尼电流,包括:
6.根据权利要求1所述的方法,其特征在于,所述按照所述目标阻尼电流,驱动所述车辆的磁流变阻尼器产生阻尼力矩,包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种控制器,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
9.一种车辆转向控制系统,其特征在于,所述转向系统包括:车速采集单元、转向盘转角及扭矩采集单元、磁流变阻尼器、助力电机、以及控制器;所述控制器分别与车速采集单元、转向盘转角及扭矩采集单元、磁流变阻尼器以及助力电机连接;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种、控制器、系统、存储介质和计算机程序产品。车辆转向控制方法包括:采集车辆在行驶过程中的车速信号、转向盘转角信号以及转向盘扭矩信号;基于转向盘转角信号和转向盘扭矩信号,确定车辆当前的转向盘工况;若转向盘工况满足预设阻尼调整条件,则基于车速信号,确定目标阻尼电流;按照目标阻尼电流,驱动车辆的磁流变阻尼器产生阻尼力矩,并基于阻尼力矩对车辆转向控制系统的助力电机进行控制。采用本方法能够提高车辆转向控制的准确性,从而确保车辆在行驶过程的稳定性。
技术研发人员:王明久,李兴修,雷红亮,郑燕冬,刘永传,赵晓瑛,刘禹昕
受保护的技术使用者:一汽解放汽车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!