一种快速翻越台阶消防救援机器人及控制方法
本发明涉及消防救援,具体涉及一种快速翻越台阶消防救援机器人及控制方法。
背景技术:
1、随着智能机器人技术的迅速发展,移动机器人在生活中应用越来越广泛。目前,消防救援用机器人在水平地面能较快运动,但遇到台阶(楼梯)等障碍时往往需要减速或停下来缓慢地攀爬台阶(楼梯)。虽然有部分研究者对快速或流畅越障做出一些尝试,但都暂不具备快速(可达到平面移动最大速度)翻越能力。如周永等人发明的“一种快速翻越障碍机器人(201911311415.x)”通过自动调节主动轮的角度和调整机器人的高度使之能快速翻越小型凸起障碍,但该机器人仅采用前轮驱动,不能实现翻越台阶(或楼梯)这样的障碍。田华伟等人发明的“一种园区综合服务智能机器人及控制方法(202210179668.1)”通过可上下和左右移动的螺纹杆,可实现流畅的跨过台阶。但该机器人由于结构限制,不能快速翻越台阶,且设计上仅局限于园区这类特定工作场所,不具备攀爬楼梯功能。在消防救援领域,救援时间非常宝贵,往往要求救援机器人不仅在平地上具有较好的机动性能,而且能快速而稳定的翻越台阶(楼梯)等障碍物。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种快速翻越台阶消防救援机器人及控制方法。
2、为了达到上述发明目的,本发明采用的技术方案为:
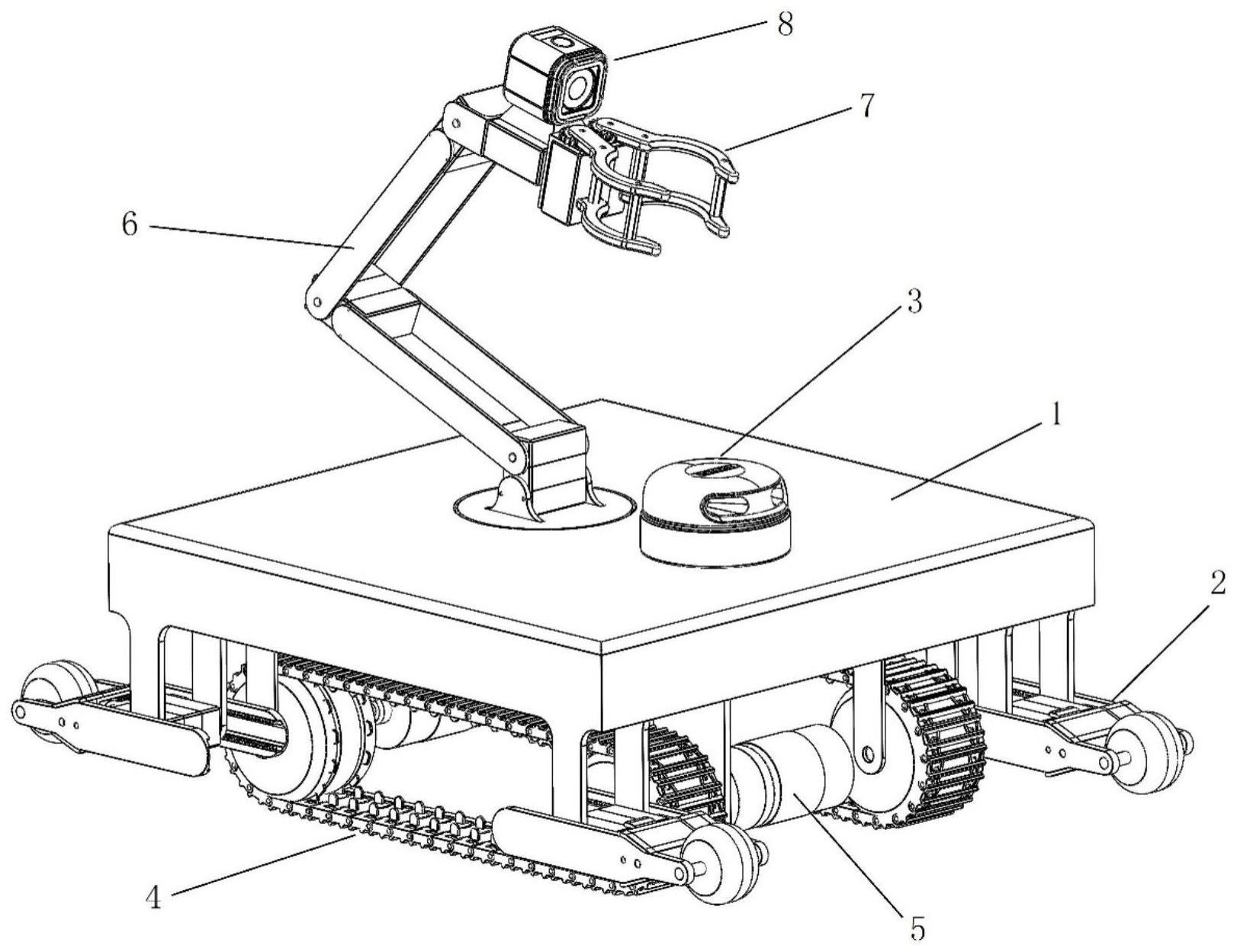
3、一种快速翻越台阶消防救援机器人,包括:机器人本体,所述机器人本体下方左右两侧各有一个履带式主动轮以及履带驱动电机,履带驱动电机通过电机支架刚性连接在本体下方,履带驱动电机前后交错安装,履带通过其自身的限位孔被履带驱动电机轴上固定的驱动齿轮和从动齿轮所固定,从动齿轮通过支撑架和本体刚性连接,履带式主动轮前后两侧各有两个伺服舵机驱动的可旋转轮腿,伺服舵机通过支撑架固定在本体下方,支撑架高度低于履带式主动轮高度。
4、进一步的,所述可旋转轮腿末端设置有小型主动轮和主动轮驱动电机,主动轮驱动电机和主动轮间通过皮带传动,主动轮和其转轴间设置有单向棘轮,主动轮依靠惯性转动或通过主动轮驱动电机转动。
5、进一步的,所述可旋转轮腿边沿有传动齿,通过咬合的减速电机调节自身长度,可旋转轮腿内侧有限位滑槽保证可旋转轮腿的刚性和滑动的顺畅。
6、进一步的,所述机器人本体上方中间设置有五自由度机械手臂,所述机五自由度机械手臂的各关节处均固定有舵机,其中第1关节处舵机可360°旋转,第2、3、4关节处舵机均平行安装并可绕关节处180°旋转,第5关节处舵机控制夹持手爪的开闭角度。
7、进一步的,所述第5关节处安装有摄像头,摄像头实时画面通过无线图传在基站显示。
8、进一步的,所述机器人本体上方前端固定有三维激光雷达,用于实现对台阶或障碍物的检测。
9、进一步的,机器人在普通地形运动时,前侧可旋转轮腿处于往前折叠状态,后侧可旋转轮腿处于往后折叠状态,机器人通过履带驱动电机转速差实现平面内的任意方向旋转和运动。
10、一种快速翻越台阶消防救援机器人的控制方法,包括如下步骤:
11、s1、获取激光雷达扫描的点云数据,对行进方向上点云数据聚类分割,提取分割后数据的线面特征,根据线面特征拟合潜在的台阶高度和深度参数;
12、s2、判断行进方向上的台阶或障碍物高度和深度于机器人可旋转轮腿伸展极限范围的关系并根据判断结果执行不同翻越策略。
13、s3、翻越前通过pid控制算法使可旋转轮腿同步旋转,保证机器人本体重心平稳上移,运动模态流畅转换。
14、本发明具有以下有益效果:
15、1、当机器人上搭载的激光雷达检测到行进方向上台阶高度和深度小于机器人可旋转轮腿伸展极限范围,控制器输出指令控制减速电机调节自身长度以适应台阶高度,同时 4个伺服舵机驱动的可旋转轮腿向下同步旋转 90°,旋转过程中包含角度负反馈,保证机器人本体重心平稳上移。
16、2、由于整个翻越过程不需要减速或者停下来,机器人的翻越速度接近平面移动速度,实现了快速翻越。
技术特征:
1.一种快速翻越台阶消防救援机器人,其特征在于,包括:机器人本体(1),所述机器人本体(1)下方左右两侧各有一个履带式主动轮以及履带驱动电机(5),履带驱动电机(5)通过电机支架刚性连接在本体下方,履带驱动电机(5)前后交错安装,履带(4)通过其自身的限位孔被履带驱动电机(5)轴上固定的驱动齿轮和从动齿轮所固定,从动齿轮通过支撑架和本体刚性连接,履带式主动轮前后两侧各有两个伺服舵机驱动的可旋转轮腿(2),伺服舵机通过支撑架固定在本体下方,支撑架高度低于履带式主动轮高度。
2.根据权利要求1所述的快速翻越台阶消防救援机器人,其特征在于,所述可旋转轮腿(2)末端设置有主动轮(21)和主动轮驱动电机(22),主动轮驱动电机(22)和主动轮(21)间通过皮带传动,主动轮(21)和其转轴间设置有单向棘轮,主动轮(21)依靠惯性转动或通过主动轮驱动电机(22)转动。
3.根据权利要求1所述的快速翻越台阶消防救援机器人,其特征在于,所述可旋转轮腿(2)内侧有传动齿,通过咬合的减速电机(23)调节自身长度,可旋转轮腿(2)内侧有限位滑槽(25)保证可旋转轮腿(2)的刚性和滑动的顺畅。
4.根据权利要求1所述的快速翻越台阶消防救援机器人,其特征在于,所述机器人本体(1)上方中间设置有五自由度机械手臂(6),所述机械手臂各关节处均固定有舵机,其中第1关节处舵机可360°旋转,第2、3、4处关节舵机均平行安装并可绕关节处180°旋转,第5关节处舵机控制夹持手爪(7)的开闭角度。
5.根据权利要求4所述的快速翻越台阶消防救援机器人,其特征在于,所述第5关节处安装有摄像头(8),摄像头(8)实时画面通过无线图传在基站显示。
6.根据权利要求1所述的快速翻越台阶消防救援机器人,其特征在于,所述机器人本体(1)上方前端固定有三维激光雷达(3),用于实现对台阶或障碍物的检测。
7.根据权利要求1所述的快速翻越台阶消防救援机器人,其特征在于,机器人在普通地形运动时,前侧的可旋转轮腿(2)处于往前折叠状态,后侧的可旋转轮腿(2)处于往后折叠状态,机器人通过履带驱动电机(5)转速差实现平面内的任意方向旋转和运动。
8.基于权利要求1-7任一项所述的快速翻越台阶消防救援机器人的控制方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种快速翻越台阶消防救援机器人及控制方法,包括机器人本体,机器人本体下方的履带以及履带两侧利用伺服舵机驱动的可旋转轮腿,可旋转轮腿末端有小型主动轮和驱动电机,驱动电机和主动轮间通过皮带传动。本体上方前端固定有三维激光雷达,本体上方中间有五自由度机械手臂可供抓取,机械手臂末端安装有摄像头。机器人通过履带驱动电机转速差实现平面内的任意方向旋转和运动。机器人履带加可转动可旋转轮腿组合设计的行走机构,既可以快速通过常见平地、小坡、沟渠等障碍,也可以快速翻越台阶或者快速攀爬楼梯;搭载激光雷达可识别楼梯台阶高度和深度,并主动调节可旋转轮腿长度,增强环境适应能力。
技术研发人员:何光强,蒋从元,王杰,余佩伦,李建宏,谌飞雨,范志雄
受保护的技术使用者:四川职业技术学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!