一种基于俯仰振动控制的商用车驾驶室半主动悬置控制方法
本发明涉及汽车,具体涉及一种基于俯仰振动控制的商用车驾驶室半主动悬置控制方法。
背景技术:
1、随着汽车产业的不断发展,商用车不仅是作为运输工具,人们对商用车的舒适性的要求也越来越高。随着减振器技术的进步,磁流变mrc减振器和连续阻尼可调cdc减振器被陆续研发出来并投入到实际运用中。
2、对半主动悬架系统的研究,目前对1/4车的理论研究较多,研究的工况单一,对此的研究方案较少,尤其是用于商用车驾驶室的半主动悬置产品较少,控制系统的许多控制方法仅存在于理论上,需求参数较多,计算量大,对控制系统芯片要求较高,实际上使用难度较大,缺乏执行力强的驾驶室悬置控制方案。
技术实现思路
1、本发明的目的在于提供一种基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,提高悬置的隔振能力以及抗俯仰能力,提高商用车舒适性。
2、为实现上述目的,本发明提供了一种基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,包括下列步骤:
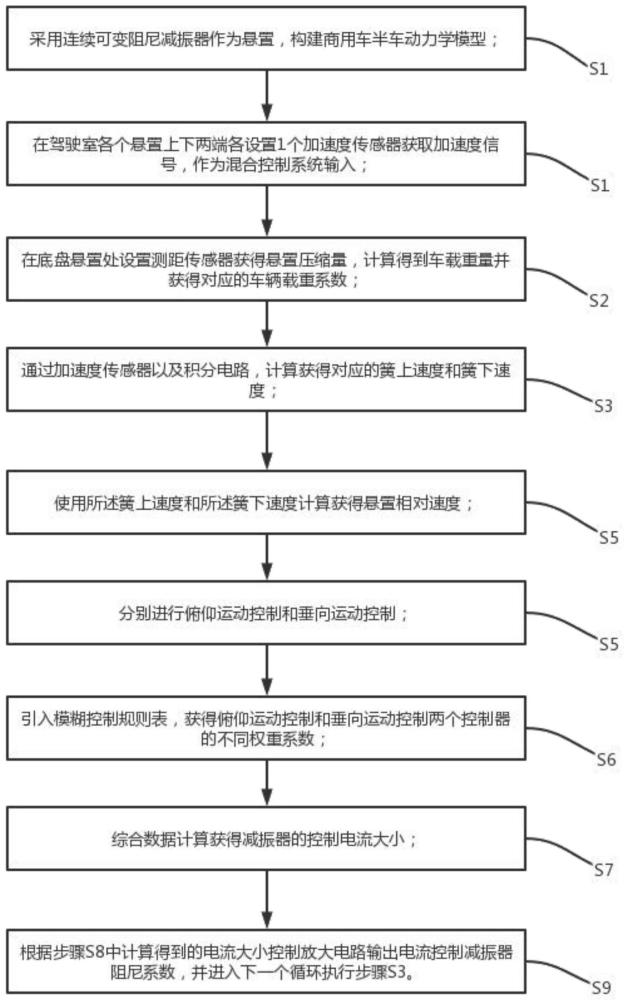
3、步骤1:采用连续可变阻尼减振器作为悬置,构建商用车半车动力学模型;
4、步骤2:在驾驶室各个悬置上下两端各设置1个加速度传感器获取加速度信号,作为混合控制系统输入;
5、步骤3:在底盘悬置处设置测距传感器获得悬置压缩量,计算得到车载重量并获得对应的车辆载重系数λ;
6、步骤4:通过加速度传感器以及积分电路,计算获得对应的簧上速度和簧下速度;
7、步骤5:使用所述簧上速度和所述簧下速度计算获得悬置相对速度;
8、步骤6:分别进行俯仰运动控制和垂向运动控制;
9、步骤7:引入模糊控制规则表,获得俯仰运动控制和垂向运动控制两个控制器的不同权重系数;
10、步骤8:综合数据计算获得减振器的控制电流大小;
11、步骤9:根据步骤8中计算得到的电流大小控制放大电路输出电流控制减振器阻尼系数,并进入下一个循环执行步骤3。
12、可选的,所述商用车半车动力学模型中包括驾驶室悬置和激励信号,所述激励信号作为一个模拟路面信息输入,所述驾驶室悬置采用连续可变阻尼减振器与空气弹簧共同组成,所述商用车半车动力学模型在所述混合控制系统开启时处于静止状态。
13、可选的,所述混合控制系统利用俯仰运动控制器和垂向运动控制器,根据车辆状态信息计算对应的权重系数,使得俯仰控制与垂向控制相结合,得到每个悬置的最终阻尼力。
14、可选的,所述混合控制系统的输入变量为由簧下和簧上加速度传感器以及积分电路得到的簧上速度和悬置相对速度,输出变量为减振器的阻尼控制电流大小。
15、可选的,根据不同的载重量引入所述车辆载重系数λ进行不同的模糊化处理,将一般模糊控制器计算得到的控制电流与所述车辆载重系数λ的乘积作为最终减振器的控制电流。
16、可选的,俯仰控制规则根据经典天棚控制进行改进,改进后的公式所示:
17、
18、
19、其中,clf为左前悬置的阻尼系数,clr为左后悬置的阻尼系数,cmax为最大阻尼系数,cmin为最小阻尼系数,为俯仰角加速度,为俯仰角加速度阈值,为俯仰角速度。
20、可选的,垂向控制规则利用改进单传感器控制策略,旨在避开实际积分过程中存在的误差以及能够实现全频域上的优化效果。
21、可选的,在步骤7的模糊控制规则中,输入变量为簧上质量加速度以及簧上质量俯仰角加速度输出变量为各个控制策略的加权因子α、β。
22、本发明提供了一种基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,利用连续可变阻尼减振器中阻尼可调的性能,利用俯仰运动控制器和垂向运动控制器,根据车辆状态信息计算对应的权重系数,使得俯仰控制与垂向控制相结合,得到每个悬置的最终阻尼力,结合模糊控制方法,同时考虑到车辆载重对减振效果的影响,引入载重系数,将一般模糊控制器计算得到的控制电流与载重系数的乘积作为最终减振器的控制电流,以此控制减振器阻尼系数,从而提供悬置的隔振能力以及抗俯仰能力,进一步的,本发明还可以通过循环调整过程不断调整控制电流,使驾驶室舒适性与传统模糊控制方法相比得到显著提高。
技术特征:
1.一种基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,包括下列步骤:
2.如权利要求1所述的基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,
3.如权利要求2所述的基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,
4.如权利要求3所述的基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,
5.如权利要求4所述的基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,
6.如权利要求5所述的基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,
7.如权利要求6所述的基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,
8.如权利要求7所述的基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,其特征在于,
技术总结
本发明涉及汽车技术领域,具体涉及一种基于俯仰振动控制的商用车驾驶室半主动悬置控制方法,利用连续可变阻尼减振器中阻尼可调的性能,利用俯仰运动控制器和垂向运动控制器,根据车辆状态信息计算对应的权重系数,使得俯仰控制与垂向控制相结合,得到每个悬置的最终阻尼力,结合模糊控制方法,同时考虑到车辆载重对减振效果的影响,引入载重系数,将一般模糊控制器计算得到的控制电流与载重系数的乘积作为最终减振器的控制电流,以此控制减振器阻尼系数,从而提供悬置的隔振能力以及抗俯仰能力,进一步的,本发明还可以通过循环调整过程不断调整控制电流,使驾驶室舒适性与传统模糊控制方法相比得到显著提高。
技术研发人员:刘夫云,赵华磊,邓聚才,张旭,胡添,严格,赵亮亮,韦永尤
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!