一种适用于凝汽器管板检测的正压爬壁机器人和检测方法与流程
本发明涉及机器人,具体涉及一种适用于凝汽器管板检测的正压爬壁机器人和检测方法。
背景技术:
1、相关技术中,火电机组凝汽器列管换热器管束检测现状是多为人工携带检测仪器逐根管道一一检测。凝汽器列管换热器管束材质多为不锈钢或者有色金属,比如铜、钛等,均为非磁性材料,磁性吸附机器人不适用。结合管板结构和凝汽器结构,涨足式爬行机器人成为了自动化检测凝汽器管束的主要载体。但是涨足式爬行机器人的运动控制较为复杂,每运动一步,都需要进行涨足缩回、移动控制、管道对中、伸出涨紧等操作,效率低。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种适用于凝汽器管板检测的正压爬壁机器人和检测方法。
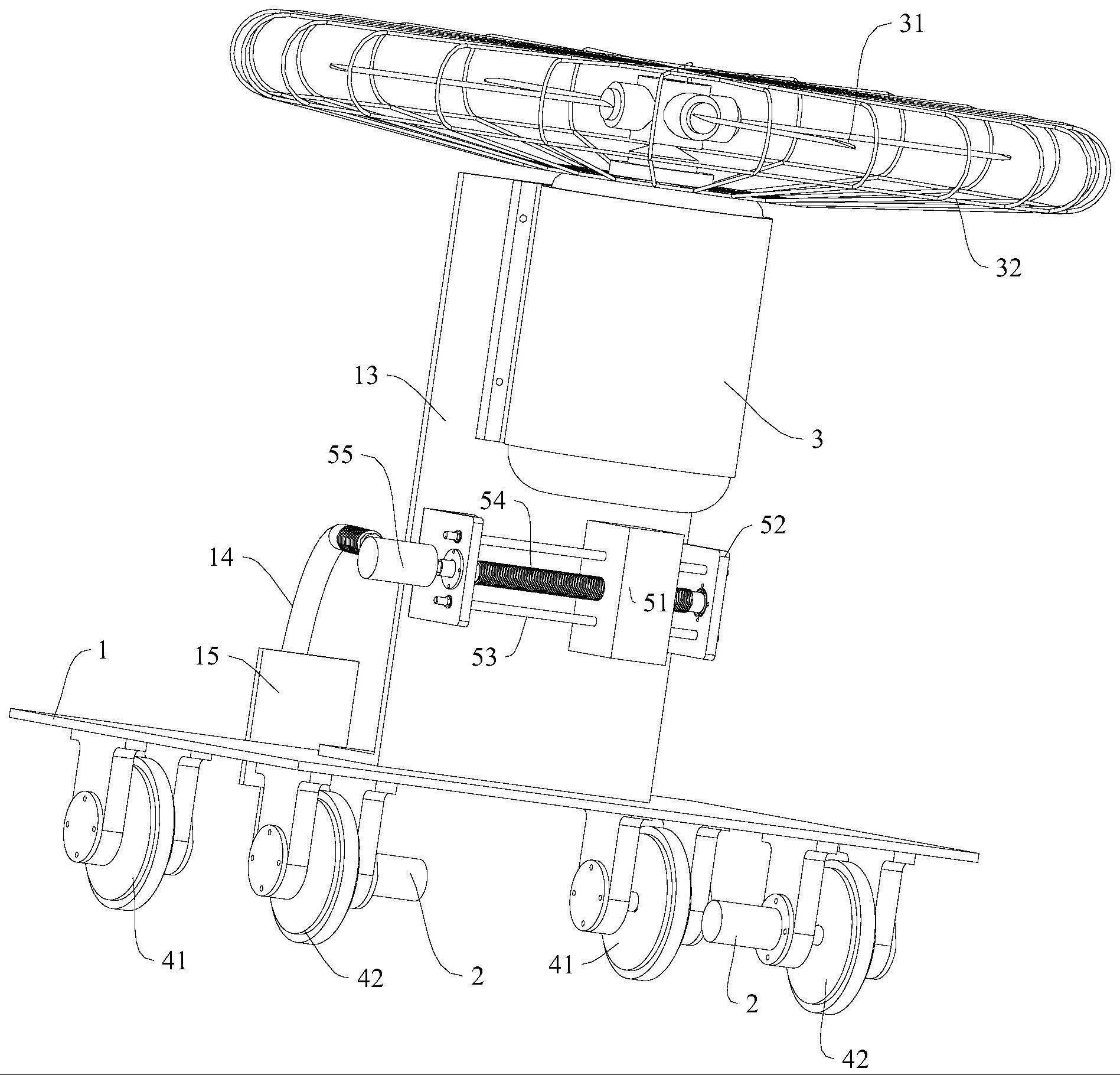
2、本发明实施例的适用于凝汽器管板检测的正压爬壁机器人,包括:
3、架体,所述架体在第一方向具有相背的第一侧面和第二侧面,所述第一方向与上下方向呈夹角;
4、多个车轮,多个所述车轮可转动地设在所述架体的所述第一侧面上,所述架体可通过多个所述车轮在凝汽器的管板上移动;
5、第一驱动器,所述第一驱动器设在所述架体上,所述第一驱动器可带动多个所述车轮的至少部分转动;
6、增压器,所述增压器设在所述架体的所述第二侧面上,所述增压器具有排风部,所述排风部的排风方向在所述第一方向上背向所述车轮,所述增压器可利用风力将所述架体上的所述车轮抵靠在凝汽器的管板上;
7、探测器,所述探测器设在所述架体上,所述探测器的探测头可在所述第一方向上移动以便所述探测头可伸入所述凝汽器的管板内进行探测。
8、因此,根据本发明实施例的适用于凝汽器管板检测的正压爬壁机器人具有提高检测凝汽器管束效率的优点。
9、在一些实施例中,多个所述车轮包括从动轮组和驱动轮组,所述从动轮组和所述驱动轮组在第二方向上间隔设置,所述从动轮组包括多个在第三方向上间隔设置的从动轮,所述驱动轮组包括多个在第三方向上间隔设置的驱动轮,所述从动轮的轴向和所述驱动轮的轴向均为所述第三方向,所述第一方向、所述第二方向和所述第三方向中的任两者相互垂直;
10、所述第一驱动器为多个,多个所述第一驱动器一一对应地与多个所述驱动轮相连。
11、在一些实施例中,所述架体的所述第二侧面上设有安装板,所述安装板在所述第一方向上具有第一预设尺寸,所述增压器设在所述安装板上。
12、在一些实施例中,所述排风部包括叶片和保护罩,所述增压器可带动所述叶片转动,所述叶片位于所述保护罩内。
13、在一些实施例中,所述安装板上设有平衡调节器,所述平衡调节器包括配重块,所述配重块具有第二预设质量,所述配重块可在所述第三方向上移动。
14、在一些实施例中,所述平衡调节器在所述第一方向上位于所述架体和所述增压器之间;
15、所述平衡调节器包括调节架、圆柱导轨、丝杆和第二驱动器,所述调节架设在所述安装板上,所述圆柱导轨和所述丝杆均沿所述第三方向延伸,所述圆柱导轨设在所述调节架上,所述丝杆可转动地设在所述调节架上,所述第二驱动器设在所述调节架上,所述第二驱动器与所述丝杆相连且可带动所述丝杆转动,所述配重块沿所述第三方向可滑动地与所述圆柱导轨相连,所述配重块上设有套设在所述丝杆上的螺母,所述丝杆转动时可带动所述配重块在所述第三方向上移动。
16、在一些实施例中,所述安装板通过机械臂与所述增压器相连,所述机械臂可调节所述增压器的所述排风部的排风方向以便所述排风部的排风方向为所述第一方向或与所述第一方向呈夹角。
17、在一些实施例中,所述架体在所述第二方向的至少一端设有支撑部,所述支撑部在所述第二方向上背向所述架体的一侧设有支撑轮,所述支撑轮的轴向为所述第三方向。
18、在一些实施例中,所述探测器包括导管,所述导管通过固定在所述架体上,所述导管的第一端部在所述第一方向上位于所述架体背向所述增压器的一侧,所述导管的所述第一端部的开口的朝向在所述第一方向上背向所述增压器,所述探测器的所述探测头设在所述导管的所述第一端部内,所述探测器的所述探测头可伸出所述导管的所述第一端部的开口。
19、本发明还提出了一种根据上述的适用于凝汽器管板检测的正压爬壁机器人的检测方法,包括以下步骤:
20、s1、划分凝汽器的管板的检测区域并设定正压爬壁机器人在所述检测区域内移动;
21、s2、设定所述正压爬壁机器人的检测起点和检测路径;
22、s3、将所述正压爬壁机器人移动至所述检测起点处且将所述正压爬壁机器人的车轮抵靠在所述凝汽器的管板;
23、s4、开启所述正压爬壁机器人的增压器以便所述正压爬壁机器人的所述车轮压向所述凝汽器的管板,启动所述正压爬壁机器人的所述第一驱动器以便带动所述车轮转动并沿所述检测路径移动,其中所述正压爬壁机器人在到达检测位置时,所述正压爬壁机器人上的探测器的探测头伸入所述凝汽器的管板内进行探测。
技术特征:
1.一种适用于凝汽器管板检测的正压爬壁机器人,其特征在于,包括:
2.根据权利要求1所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,
3.根据权利要求2所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,所述架体的所述第二侧面上设有安装板,所述安装板在所述第一方向上具有第一预设尺寸,所述增压器设在所述安装板上。
4.根据权利要求3所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,所述排风部包括叶片和保护罩,所述增压器可带动所述叶片转动,所述叶片位于所述保护罩内。
5.根据权利要求3所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,所述安装板上设有平衡调节器,所述平衡调节器包括配重块,所述配重块具有第二预设质量,所述配重块可在所述第三方向上移动。
6.根据权利要求5所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,
7.根据权利要求3所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,所述安装板通过机械臂与所述增压器相连,所述机械臂可调节所述增压器的所述排风部的排风方向以便所述排风部的排风方向为所述第一方向或与所述第一方向呈夹角。
8.根据权利要求2所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,所述架体在所述第二方向的至少一端设有支撑部,所述支撑部在所述第二方向上背向所述架体的一侧设有支撑轮,所述支撑轮的轴向为所述第三方向。
9.根据权利要求1-8任一项所述的适用于凝汽器管板检测的正压爬壁机器人,其特征在于,所述探测器包括导管,所述导管通过固定在所述架体上,所述导管的第一端部在所述第一方向上位于所述架体背向所述增压器的一侧,所述导管的所述第一端部的开口的朝向在所述第一方向上背向所述增压器,所述探测器的所述探测头设在所述导管的所述第一端部内,所述探测器的所述探测头可伸出所述导管的所述第一端部的开口。
10.一种根据权利要求1-9任一项所述的适用于凝汽器管板检测的正压爬壁机器人的检测方法,其特征在于,包括以下步骤:
技术总结
本发明提出一种适用于凝汽器管板检测的正压爬壁机器人和检测方法。本发明的适用于凝汽器管板检测的正压爬壁机器人,包括:架体,架体在第一方向具有相背的第一侧面和第二侧面,第一方向与上下方向呈夹角;多个车轮,多个车轮可转动地设在架体的第一侧面上,架体可通过多个车轮在凝汽器的管板上移动;第一驱动器,第一驱动器设在架体上,第一驱动器可带动多个车轮的至少部分转动;增压器,增压器设在架体的第二侧面上,增压器具有排风部,排风部的排风方向在第一方向上背向车轮,增压器可利用风力将架体上的车轮抵靠在凝汽器的管板上;探测器。因此,根据本发明的适用于凝汽器管板检测的正压爬壁机器人具有提高检测凝汽器管束效率的优点。
技术研发人员:周雨锋,纪煜,杨略,罗鑫,吴波,陈鸿伟,沈洋,秦楠,江永,陈顺宝,李太江,张瑞刚,李巍,陈盛广,刘立营,李伟青,郭子扬,曹小龙,孙猛,李生文,孙琦,娄正计,王博,李聚涛,程晔锋
受保护的技术使用者:华能(广东)能源开发有限公司汕头电厂
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!