升降切换轮履式移动装置
本发明涉及移动机器人领域,尤其涉及一种升降切换轮履式移动装置和包括该装置的轮履式越障机器人。
背景技术:
1、现今机器人移动装置(也称为底盘)的运动模式多样化,主要根据机器人的设计和应用需求来选择适合的运动模式。轮式移动装置是最常见和普遍使用的运动模式之一。它通过轮子来实现机器人在平面上的移动。轮式移动装置具有简单、灵活、成本低等优点,适用于室内和平坦地面。此外,还有差速轮、麦克纳姆轮等不同类型的轮式移动装置,以满足机器人的不同需求。
2、相较于轮式移动装置而言,履式移动装置则通过履带带动机器人行进,适用于复杂地形和不平整表面的工作环境。它具有良好的抓地力和通过障碍的能力,常用于农业、探险和军事等领域。
3、总体而言,机器人移动装置的运动模式多样化,不同的模式在不同的领域和应用中发挥着重要的作用。但是两种移动装置都只能运用到单一的环境地形,在农业作业中通常涉及到多种复杂地形,单一的移动部件不能完美满足作业需求,另外,履带底盘在不平整表面行进时,产生的抖动或冲击过大,容易导致机器人内部零件松动,机器人稳定性不高,上述问题急需解决。
技术实现思路
1、本发明实施例的目的在于提供一种同时具有轮式移动装置和履式移动装置的升降切换轮履式移动装置和包括该移动装置的越障机器人,旨在解决现有的越障机器人移动装置种类单一,无法应用于多种环境地形的问题。
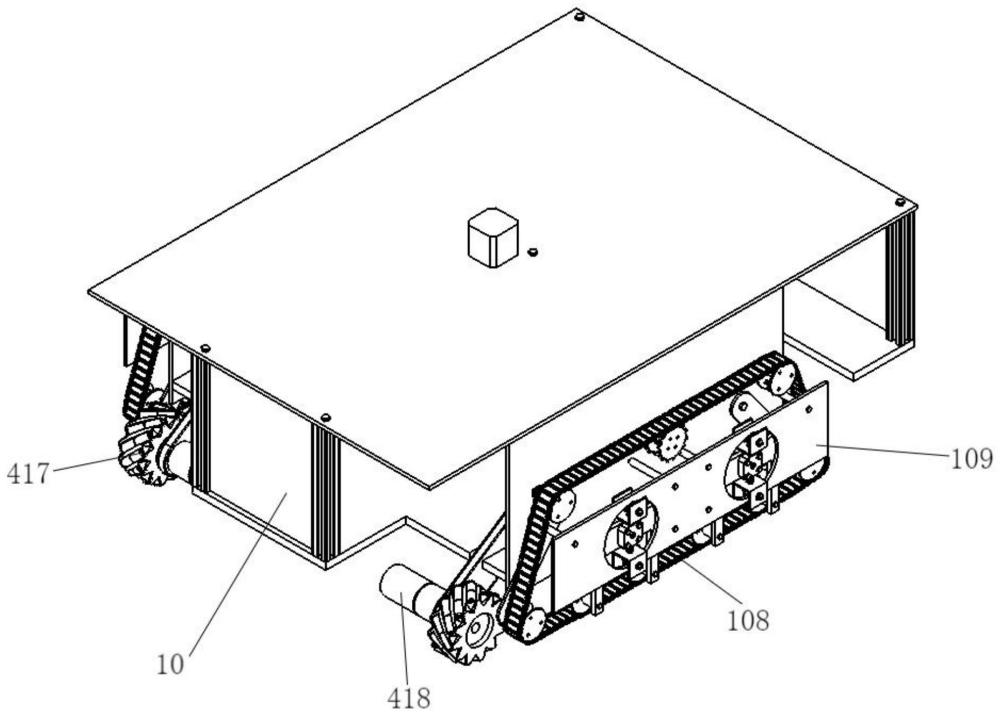
2、本发明实施例是这样实现的,一种升降切换轮履式移动装置,包括底盘架、履式移动组件、轮式移动组件、轮履切换组件和减震组件,其中,所述轮式移动组件包括麦克纳姆轮,所述履式移动组件和轮式移动组件对称设置于所述底盘架两侧,所述轮履切换组件包括滑轨机构、牵引机构和摇杆机构,所述滑轨机构与所述底盘架固定连接,所述牵引机构的中部与所述滑轨机构滑动连接,两端通过连杆和所述摇杆机构分别与麦克纳姆轮连接,所述滑轨机构带动牵引机构上下移动,进而带动设置于所述牵引机构两端的麦克纳姆轮上升或下降;所述减震组件设置在履式移动组件上。
3、进一步地,所述履式移动组件包括对称设置于所述底盘架两侧的履带组件,每侧所述履带组件包括主动轮、支撑轮、从动轮和履带,所述主动轮与所述履带啮合连接,并驱动所述履带向前或向后转动。
4、进一步地,所述支撑轮位置呈四边形分布,呈上下两排分布,所述从动轮设置于下排支撑轮之间。
5、进一步地,所述从动轮数目为四个。
6、进一步地,所述减震组件包括减震滑轮、减震弹簧、平衡杆和减震轴承座,所述减震滑轮设置于所述减震轴承座上下两端,所述减震滑轮与减震轴承座之间通过减震弹簧连接,所述减震轴承座与平衡杆的上端固定连接。
7、进一步地,所述平衡杆的下端设置有至少两个支脚,每个支脚通过连接轴连接一个从动轮。
8、进一步地,所述滑轨机构包括丝杆、滑块内套、辅导轨和滑块,所述丝杆中部设置有螺纹,所述滑块内套和所述滑块固定连接,并套设在所述丝杆中部,所述滑块可沿所述螺纹在所述辅导轨上滑动。
9、进一步地,牵引机构包括轴承座、车轮重心杆和导轨牵引柱,所述车轮重心杆设置于两个所述轴承座之间,所述车轮重心杆的两端分别套设所述导轨牵引柱。
10、进一步地,所述轴承座与所述滑块固定连接。
11、进一步地,本发明还提供了一种轮履式越障机器人,其特征在于,包括上述升降切换轮履式移动装置。
12、本发明具有如下有益效果:该机器人采用轮式和履式相结合的移动方式,其轮式移动组件采用麦克纳姆轮,适合在多种平坦地形实现多方向的快速移动,大大提升了移动效率;当遇到泥泞、沙土、坑洼等复杂路况时,可通过轮履切换组件将轮式移动组件抬升至高于履式移动组件底部,从而切换至履式移动方式,履带与障碍物接触,使机器人能够克服各种崎岖地形。既保证了机器人移动装置的灵活性,又使其具有平稳越障能力。
13、该机器人的履式移动组件上还设置有减震组件,利用减震滑轮与减震轴承座,两者通过减震弹簧连接,平衡杆将减震轴承座和从动轮连接,当从动轮经过坑洼、凸起路面时先接触的轮子由弹簧的拉伸与压缩向上抬起且通过平衡杆跟随平面轴承座进行小幅度摆动,以达成防抖和减震的目的,保证机器人以履式移动时更加稳定,减少机器人的颠簸,使其能更加平稳地通过复杂路况,减少机器人面对不平坦路面时造成的抖动和撞击而导致的机器人零部件的松动、磨损,进而保证机器人的整体稳定性。
技术特征:
1.一种升降切换轮履式移动装置,其特征在于,包括底盘架、履式移动组件、轮式移动组件、轮履切换组件和减震组件,其中,所述轮式移动组件包括麦克纳姆轮,所述履式移动组件和轮式移动组件对称设置于所述底盘架两侧,所述轮履切换组件包括滑轨机构、牵引机构和摇杆机构,所述滑轨机构与所述底盘架固定连接,所述牵引机构的中部与所述滑轨机构滑动连接,两端通过连杆和所述摇杆机构分别与麦克纳姆轮连接,所述滑轨机构带动牵引机构上下移动,进而带动设置于所述牵引机构两端的麦克纳姆轮上升或下降;所述减震组件设置在履式移动组件上。
2.如权利要求1所述的升降切换轮履式移动装置,其特征在于,所述履式移动组件包括对称设置于所述底盘架两侧的履带组件,每侧所述履带组件包括主动轮、支撑轮、从动轮和履带,所述主动轮与所述履带啮合连接,并驱动所述履带向前或向后转动。
3.如权利要求2所述的升降切换轮履式移动装置,其特征在于,所述支撑轮位置呈四边形分布,呈上下两排分布,所述从动轮设置于下排支撑轮之间。
4.如权利要求2所述的升降切换轮履式移动装置,其特征在于,所述从动轮数目为四个。
5.如权利要求2所述的升降切换轮履式移动装置,其特征在于,所述减震组件包括减震滑轮、减震弹簧、平衡杆和减震轴承座,所述减震滑轮设置于所述减震轴承座上下两端,所述减震滑轮与减震轴承座之间通过减震弹簧连接,所述减震轴承座与平衡杆的上端固定连接。
6.如权利要求5所述的升降切换轮履式移动装置,其特征在于,所述平衡杆的下端设置有至少两个支脚,每个支脚通过连接轴连接一个从动轮。
7.如权利要求1所述的升降切换轮履式移动装置,其特征在于,所述滑轨机构包括丝杆、滑块内套、辅导轨和滑块,所述丝杆中部设置有螺纹,所述滑块内套和所述滑块固定连接,并套设在所述丝杆中部,所述滑块可沿所述螺纹在所述辅导轨上滑动。
8.如权利要求7所述的升降切换轮履式移动装置,其特征在于,所述牵引机构包括轴承座、车轮重心杆和导轨牵引柱,所述车轮重心杆设置于两个所述轴承座之间,所述车轮重心杆的两端分别套设所述导轨牵引柱。
9.如权利要求8所述的升降切换轮履式移动装置,其特征在于,所述轴承座与所述滑块固定连接。
10.一种轮履式越障机器人,其特征在于,包括如权利要求1-9任一项所述的升降切换轮履式移动装置。
技术总结
本发明涉及移动机器人领域,尤其涉及一种升降切换轮履式移动装置和包括该装置的轮履式越障机器人。该移动装置包括底盘架、履式移动组件、轮式移动组件、轮履切换组件和减震组件,其中,所述轮式移动组件包括麦克纳姆轮,所述履式移动组件和轮式移动组件对称设置于所述底盘架两侧,所述轮履切换组件包括滑轨机构、牵引机构和摇杆机构,所述滑轨机构与所述底盘架固定连接,所述牵引机构的中部与所述滑轨机构滑动连接,两端通过连杆和所述摇杆机构分别与麦克纳姆轮连接。该机器人采用轮式和履式相结合的移动方式,使机器人能够克服各种崎岖地形,既保证了机器人的灵活性,又使其具有平稳越障能力。
技术研发人员:彭曙蓉,钟思林,郑卓铭,赵启航,杨濠诚,林广政,李志伟
受保护的技术使用者:深圳技术大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!