一种基于传动比信号的无人驾驶矿车转向系统监控方法与流程
本发明涉及无人驾驶矿车领域,具体涉及一种基于传动比信号的无人驾驶矿车转向系统监控方法。
背景技术:
1、无人驾驶矿车转向子系统是无人驾驾驶矿车中的核心组件之一,它的性能直接影响到矿车的行驶安全与效率。在露天矿山无人运输系统生产作业过程中,矿车故障监控是一个关键环节,通常依赖于传动比阈值来判断转向子系统的状态。传动比是指矿车转向子系统的输入角速度(由转向电机或其他驱动设备产生)与输出角速度(在车轮上实现)之间的比值。这个比值的变化可以反映出矿车转向子系统的运行状态。在无人驾驶矿车运行过程中,随着行驶里程程度的增加,载荷和车速不断变化,从而引起载荷传动比变化。对于一辆无人驾驶矿车和固定的作业场景环境,所有因素最终都能体现在运行时的转向子系统传动比,因此可以通过监测传动比信号的变化情况来反映转向子系统的运行里程状态。
2、在现有技术中,无人驾驶矿车转向子系统的监控通常是通过将多个第一采样传动比和多个第二采样传动比输入到滤波器中融合,得到与特定角度对应的转向子系统传动比,然后重复该过程,获取各个角度对应的转向子系统传动比。此外,还需要设定不同类型矿车和载荷参数下的传动比阈值。
3、然而,现有的无人驾驶矿车转向子系统监控方法存在一些问题。首先,这种方法需要对各个角度重新设定阈值参数,而且无法适应多作业环境场景的变化。其次,由于载荷与车速的变化,传动比阈值难以实时同步,容易出现误报警,无法有效监测转向子系统的运行状态。最后,这种方法需要设定不同类型矿车和载荷参数下的传动比阈值,这增加了设定阈值的复杂性和工作量。
技术实现思路
1、为解决上述问题,本发明提供一种基于传动比信号的无人驾驶矿车转向系统监控方法。
2、该方法包括:
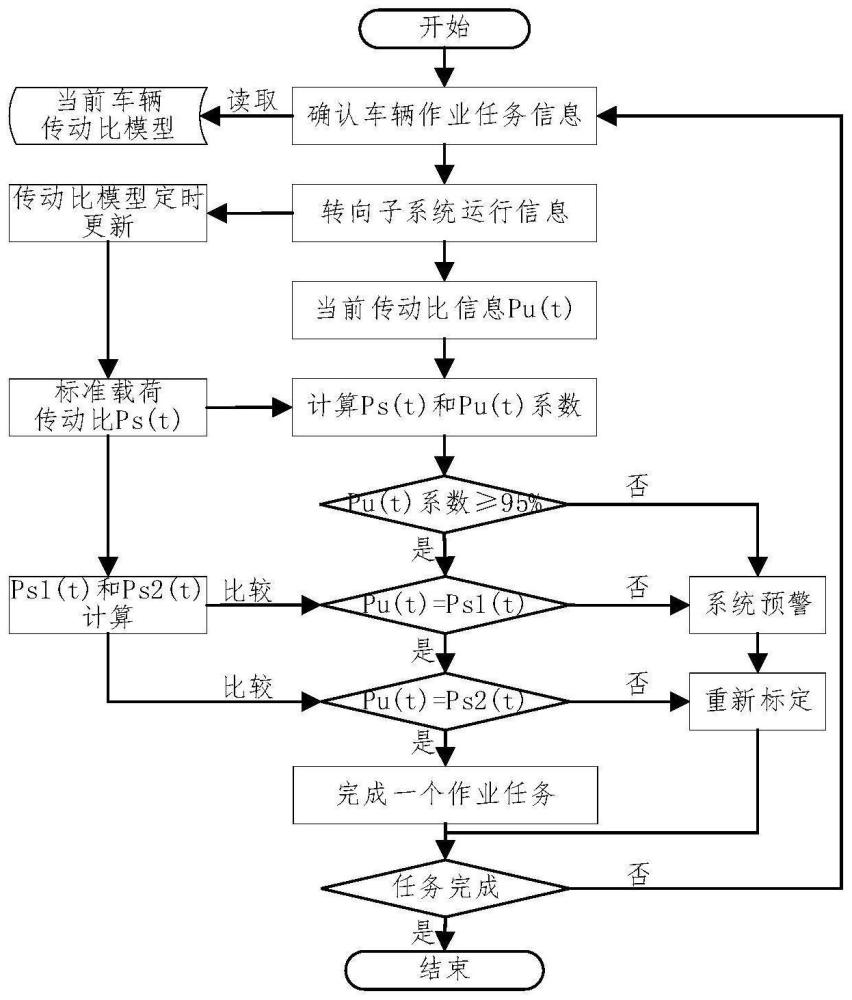
3、步骤一,构建传动比模型基于收集的数据预测标准载荷传动比ps(t)、衰退阈值曲线ps1(t)和传动比失效阈值曲线ps2(t);
4、步骤二,确认车辆作业任务信息,并读取当前车辆传动比模型;
5、步骤三,读取转向子系统运行信息及转向子系统实际运行传动比pu(t);
6、步骤四,根据预定的衰退判断策略判断传动子系统是否运行正常,若运行正常则重复执行步骤二、三、四直到任务完成;若运行不正常,则发出系统预警并重新标定传动子系统。
7、进一步的,所述传动比模型基于svr和anfis算法建立,传动比模型中anfis模糊神经网络结构一共有5层,输入为车辆实时运动状态,包括车速、横摆角速度、方向盘角度和以及轮速;前4层是用来匹配模糊规则的前件,第5层用来产生模糊规则的后件;模型输入量模数为4,输入量的模糊分割数为3。
8、进一步的,传动比采用libsvm库进行训练与预测,传动比使用径向基核函数。
9、进一步的,对于步骤三中读取的转向子系统运行信息进行预处理,具体包括:
10、处数据样本为n个,第i个样本的第j个指标为xij,则每个指标的平均值xj和标准差sj为:
11、
12、
13、原始数据标准化为:
14、
15、其中,x′ij代表xij标准化后的数据。
16、进一步的,传动比阈值系数为预设的常数。
17、进一步的,步骤四所述预定的衰退判断策略,具体包括:
18、当pu(t)≤ps1(t)时,转向子系统传动比处于正常状态;
19、当ps1(t)<pu(t)≤ps2(t)时,需要重新标注传动比;
20、当pu(t)>ps2(t)时,执行转向子系统重新标注策略。
21、进一步的,传动比阈值系数[δ]为:
22、[δ]=[p(t)]/[p]·δ;
23、其中,[p(t)]为转向子系统在指定行驶里程时得到的转向子系统净载荷传动比,[p]为转向子系统净载荷传动比,δ为初始里程传动比阈值。
24、进一步的,步骤四所述预定的衰退判断策略,具体包括:
25、当传动比阈值系数[δ]<95%时,则发送系统预警,并对传动子系统进行重新标定;
26、当传动比阈值系数[δ]≥95%并且pu(t)≠ps1(t)时,则发送系统预警,并对传动子系统进行重新标定;
27、当传动比阈值系数[δ]≥95%并且pu(t)≠ps1(t)并且pu(t)≠ps2(t)时,重新标定传动子系统;
28、其他情况,判断为传动子系统运行正常。
29、本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
30、本申请提出的方法利用自适应神经模糊系统与支持向量回归建立传动比与转向参数之间的模型,可以根据实际运行状态自适应地调整传动比阈值,而不需要对各个角度重新设定阈值参数,从而适应多作业环境场景的变化。
31、本申请通过模型计算理论载荷传动比并实时更新传动比阈值,可以解决由于载荷与车速的变化导致的传动比阈值难以实时同步的问题,从而减少误报警,有效地监测转向子系统的运行状态。
32、本申请在建立模型后,仅需设置一个初始阈值系数即可实现自适应监控,这大大简化了设定阈值的复杂性和工作量,降低了成本。同时,该方法能够在无人驾驶矿车的车载计算平台上进行软件开发,采集无人驾驶矿车内部信号,无需改造矿车,将转向标注策略集成到无人驾驶系统中,实现了对转向子系统的实时、准确监控,提高了无人驾驶矿车的运行安全性和效率。
技术特征:
1.一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,所述传动比模型基于svr和anfis算法建立,传动比模型中anfis模糊神经网络结构一共有5层,输入为车辆实时运动状态,包括车速、横摆角速度、方向盘角度和以及轮速;前4层是用来匹配模糊规则的前件,第5层用来产生模糊规则的后件;模型输入量模数为4,输入量的模糊分割数为3。
3.根据权利要求1所述一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,传动比采用libsvm库进行训练与预测,传动比使用径向基核函数。
4.根据权利要求1所述一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,对于步骤三中读取的转向子系统运行信息进行预处理,具体包括:
5.根据权利要求1所述一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,传动比阈值系数为预设的常数。
6.根据权利要求5所述一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,步骤四所述预定的衰退判断策略,具体包括:
7.根据权利要求1所述一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,传动比阈值系数[δ]为:
8.根据权利要求7所述一种基于传动比信号的无人驾驶矿车转向系统监控方法,其特征在于,步骤四所述预定的衰退判断策略,具体包括:
技术总结
本发明涉及无人驾驶矿车领域,具体涉及一种基于传动比信号的无人驾驶矿车转向系统监控方法。首先,根据收集的数据建立传动比模型,预测标准载荷传动比和两个传动比阈值曲线。然后,确认车辆作业任务信息,并读取当前车辆的传动比模型。接着,读取转向子系统的运行信息以及实际运行的传动比。最后,根据预定的衰退判断策略来确定转向子系统是否运行正常。如果运行正常,则继续执行上述步骤,直到任务完成。如果运行不正常,系统会发出预警,并重新标定传动子系统。本发明可以自动调整传动比阈值,适应多种作业环境的变化,减少误报警,有效地监测转向子系统的运行状态。
技术研发人员:潘伟,王杨,陈成,王炜杰,张俊,汪易开,夏齐国
受保护的技术使用者:安徽海博智能科技有限责任公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!