过坎组件、清洁机器人及其过坎方法与流程
本发明涉及机器人,尤其涉及一种过坎组件、清洁机器人及其过坎方法。
背景技术:
1、现有技术的机器人,移动越障能力主要是由轮子和底盘的结构来实现,轮子半径越大,则越障能力越强,受限于整机规格,现有的轮子和底盘的表现往往不尽如人意,在室内运行时,当遇到台阶、沟槽等地面障碍物时,往往难以通过,无法正常发挥清洁效果,现有技术的机器人的前轮大多为单轮结构,单轮的直径大小影响了机器人能通过的台阶高度,机器人的过坎能力有待提升。
技术实现思路
1、本发明的一个目的在于提供一种过坎组件、清洁机器人及其过坎方法,所述过坎组件通过多轮叠加结构,在不影响整机的结构空间前提下,提升了过坎通行能力,适应性较好,且不影响结构空间。
2、本发明的其它优势和特点通过下述的详细说明得以充分体现并可通过所附权利要求中特地指出的手段和装置的组合得以实现。
3、依本发明的一个方面,能够实现前述目的和其他目的和优势的本发明的一种过坎组件,包括:
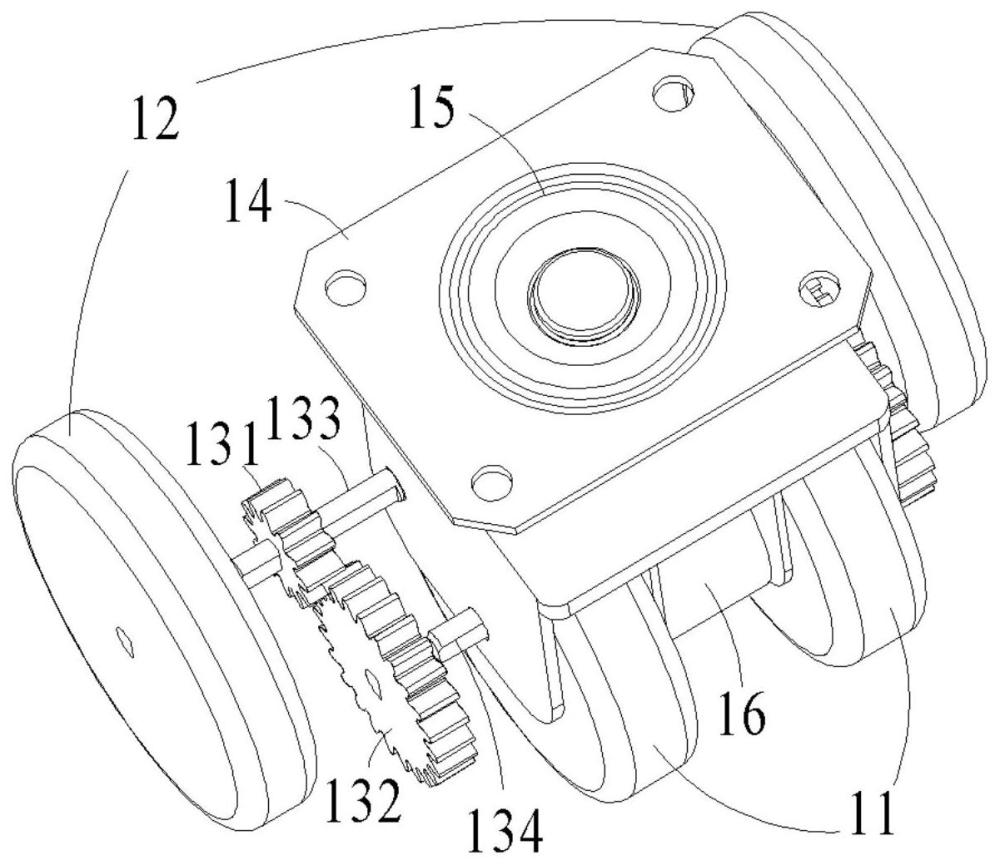
4、前轮组、后轮组、传动件以及动力件,所述前轮组和所述后轮组通过所述传动件被可转动地设置,所述动力件被设于所述前轮组,所述传动件包括两组轮轴,每组所述轮轴分别被设于每个所述前轮和每个所述后轮之间。
5、根据本发明的一个实施例,所述动力件为双出轴电机。
6、根据本发明的一个实施例,所述前轮组为两个前轮,所述后轮组为两个后轮,所述动力件被设于两个所述前轮之间,每个所述后轮被设于每个所述前轮的外侧。
7、根据本发明的一个实施例,所述传动件包括两组轮轴,每组所述轮轴分别被设于每个所述前轮和每个所述外轮之间。
8、根据本发明的一个实施例,所述传动件包括两个第一齿轮、两个第二齿轮、第一传动轴和第二传动轴,每个所述第一齿轮和每个所述第二齿轮互相啮合地被设于每个所述前轮和每个所述外轮之间,所述第一传动轴被设于两个所述第一齿轮之间,所述第二传动轴被设于两个所述第二齿轮之间。
9、根据本发明的一个实施例,所述过坎组件还包括安装板,所述安装板被设于所述前轮组的上方。
10、根据本发明的一个实施例,所述过坎组件还包括轴承,所述前轮组通过所述轴承被可转动地设于所述安装板。
11、根据本发明的一个实施例,所述前轮组被可360度转动地设于所述轴承和所述安装板。
12、依本发明的另一个方面,一种清洁机器人,包括:
13、车体;
14、底座,所述车体被设于所述底座的上方;
15、轮毂电机组件,所述轮毂电机组件被设于所述底座的一侧;以及
16、如上任意一项所述的过坎组件,所述过坎组件被设于所述底座的另一侧。
17、依本发明的又一个方面,一种过坎方法,适用于如上所述的清洁机器人,包括以下步骤:
18、所述清洁机器人处于移动工作状态时,前轮组接触到台阶;
19、所述前轮组试图移动,台阶传递反作用力至所述前轮组,所述前轮组接收反作用力并分别形成提升力和驱动力,从而协助所述前轮组被提升至台阶上;
20、所述前轮组带动后轮组转动,所述后轮组被提升至台阶上并推动所述前轮组持续移动。
21、本发明的有益效果是:通过多轮叠加结构,前后轮搭配齿轮传动的方式,在过坎越障时,增加了过坎动力,提升清洁机器人的通行避障能力,且不影响整机的结构空间设计,节省了装配空间。
技术特征:
1.一种过坎组件,其特征在于,包括:
2.根据权利要求1所述过坎组件,其特征在于,所述动力件为双出轴电机。
3.根据权利要求2所述的过坎组件,其特征在于,所述前轮组为两个前轮,所述后轮组为两个后轮,所述动力件被设于两个所述前轮之间,每个所述后轮被设于每个所述前轮的外侧。
4.根据权利要求3所述过坎组件,其特征在于,所述传动件包括两组轮轴,每组所述轮轴分别被设于每个所述前轮和每个所述外轮之间。
5.根据权利要求4所述过坎组件,其特征在于,所述传动件包括两个第一齿轮、两个第二齿轮、第一传动轴和第二传动轴,每个所述第一齿轮和每个所述第二齿轮互相啮合地被设于每个所述前轮和每个所述外轮之间,所述第一传动轴被设于两个所述第一齿轮之间,所述第二传动轴被设于两个所述第二齿轮之间。
6.根据权利要求5所述的过坎组件,其特征在于,所述过坎组件还包括安装板,所述安装板被设于所述前轮组的上方。
7.根据权利要求6所述的过坎组件,其特征在于,所述过坎组件还包括轴承,所述前轮组通过所述轴承被可转动地设于所述安装板。
8.根据权利要求7所述过坎方法,其特征在于,所述前轮组被可360度转动地设于所述轴承和所述安装板。
9.一种清洁机器人,其特征在于,包括:
10.一种过坎方法,基于权利要求9所述的清洁机器人,其特征在于,包括以下步骤:
技术总结
本发明公开了一种过坎组件、清洁机器人及其过坎方法,所述清洁机器人包括车体、底座、轮毂电机组件、过坎组件,所述车体被设于所述底座的上方,所述轮毂电机组件被设于所述底座的一侧,所述过坎组件包括前轮组、后轮组、传动件以及动力件,所述前轮组和所述后轮组通过所述传动件被可转动地设置,所述动力件被设于所述前轮组,所述传动件包括两组轮轴,每组所述轮轴分别被设于每个所述前轮和每个所述外轮之间,所述过坎组件被设于所述底座的另一侧。所述过坎组件提升了所述清洁机器人的过坎能力。
技术研发人员:李岩,鲁超,吴潇,石福君,苗应亮,王杰
受保护的技术使用者:盛视科技股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!