一种用于消防救援的可搭乘足式机器人平台的制作方法
本发明涉及消防救援领域,具体是一种用于消防救援的可搭乘足式机器人平台。
背景技术:
1、移动机器人平台的发展是一个重要和相对比较活跃的科研领域。移动机器人一般包括轮式、履带式和足式机器人。相对于轮式和履带式机器人而言,足式机器人对非结构环境的适应性更强,几乎可以在陆地上的任何地方行走。一般情况下,足式机器人可分为双足、四足和六足机器人。相对于双足机器人而言,四足机器人具有较好的稳定性;而相对于六足机器人而言,四足机器人具有较为简单的机构复杂度,因此,越来越多的学者投入到四足机器人领域的研究。
2、bigdog该款四足机器人系统自带动力源,无外接动力线缆和通讯线缆,具有高速、高负载能力,对典型非结构化地形具有高适应能力,可在泥沙、乱石、雪地、冰面和斜坡等路面上实现稳定前行,并具有抗惯性力、抗侧向冲击等扰动的平衡自恢复能力。bigdog以其优越的稳定性及仿生性被认为是目前最具代表性的四足机器人。
3、研究发现,马和狗等四足哺乳动物,其身体结构及行走方式独特,对于复杂环境的适应能力强,行走速度高、负重量大,这些特点对于四足机器人的研究具有代表性。四足哺乳动物腿部结构主要有髋关节、膝关节、踝关节和趾关节。每种关节有1~3个自由度,这种结构使得运动变得特别灵活。四足机器人每条腿由肩关节侧摆、髋关节和膝关节俯仰的3个主动自由度和1个脚部被动伸缩的被动自由度组成。肩关节的侧摆运动,使机器人实现侧向运动;髋关节和膝关节的俯仰运动,使机器人实现前后向运动;被动伸缩关节使机器人腿与地面接触时起到缓冲作用,降低冲击力,提高机体稳定性。
4、因此,开发一种载人足式机器人在消防救援中具有重大意义。
技术实现思路
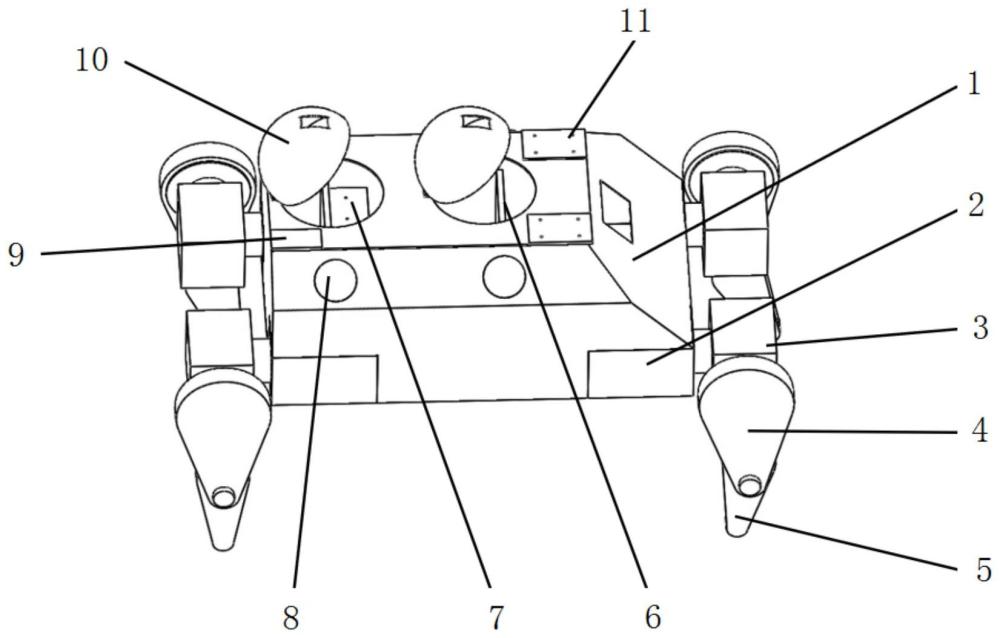
1、本发明的目的是提供一种用于消防救援的可搭乘足式机器人平台,包括平台主体、胯部电机、大腿电机、大腿、小腿、前排座椅、后排座椅、电驱动轮安装架、无人机升降平台、平台顶部护罩和机械手安装平台。
2、所述平台主体的内部是一个空腔,所述平台主体的平台外壳由钢板焊接而成。
3、所述平台主体包括容纳室和设置在容纳室下方的十字型底座,所述容纳室的底部和所述十字型底座的顶部连通。
4、所述容纳室的顶部开设有通孔i和通孔ii,所述通孔i和通孔ii上方安装有所述平台顶部护罩,所述通孔i下方设置有所述前排座椅,所述通孔ii下方设置有所述后排座椅。
5、所述容纳室顶面前方两侧安装有所述机械手安装平台,所述机械手安装平台靠近所述前排座椅。
6、所述容纳室顶面后方两侧安装有所述无人机升降平台,所述无人机升降平台靠近所述后排座椅。
7、所述容纳室的前方是一斜面i,所述斜面i上开设有平台观察窗。
8、所述容纳室的两侧面各有一斜面ii,所述斜面ii上安装有所述电驱动轮安装架。
9、所述十字型底座侧面安装有四个所述胯部电机。
10、所述胯部电机与所述大腿电机连接,所述大腿电机与所述大腿连接,所述大腿与所述小腿连接。
11、进一步,所述胯部电机包括胯部电机定子及外壳、胯部电机转子和电机转子六方连接部。所述胯部电机转子一侧与所述胯部电机定子及外壳连接,另一侧与所述电机转子六方连接部连接。
12、所述大腿电机包括大腿电机定子及外壳、大腿电机转子和电机转子圆盘连接部。所述大腿电机转子一侧与所述大腿电机定子及外壳连接,另一侧与所述电机转子圆盘连接部连接。
13、所述大腿电机定子及外壳上设置有胯部电机六方安装位,所述电机转子六方连接部装配在所述胯部电机六方安装位中。
14、进一步,所述大腿截面由一个大圆弧和一个小圆弧连接而成。
15、所述大腿的大圆弧端设置有大腿电机圆盘安装位,所述大腿的小圆弧端设置有小腿关节电机安装位和电驱动轮换装位。
16、所述大腿电机圆盘安装位和所述小腿关节电机安装位设置在所述大腿的同一侧板面。所述电驱动轮换装位设置在所述大腿的另一侧板面。
17、所述电机转子圆盘连接部装配在所述大腿电机圆盘安装位中。
18、进一步,所述小腿截面由一个大圆弧和一个小圆弧连接而成。所述小腿的大圆弧端设置有小腿关节电机。
19、所述小腿关节电机装配在所述小腿关节电机安装位中。
20、进一步,所述电驱动轮安装架上配备有电驱动轮。当路面平坦时,将所述小腿从所述大腿中卸下,把所述电驱动轮装配到所述大腿的电驱动轮换装位中。
21、进一步,所述前排座椅与所述平台主体通过螺栓连接。所述前排座椅采用阻尼液压缸减震。
22、进一步,所述后排座椅从上到下依次包括座椅、电推杆i和减震平台。
23、进一步,所述无人机升降平台在未使用时,置于所述平台主体的内部;使用时,通过电推杆ii将所述无人机升降平台提升到所述平台主体的顶部。
24、进一步,所述平台顶部护罩与所述平台主体顶部通过护罩安装铰链连接。所述平台顶部护罩为一半球形护罩,所述平台顶部护罩的前方开设有护罩观察窗。
25、进一步,所述机械手安装平台为通用机械手安装底座。在不同工况下,装卸不同的机械手。
26、本发明的技术效果是毋庸置疑的,本发明的有益效果如下:
27、1.本发明能适应各种复杂环境和工况的工作,特别是山地、丘陵、沟壑地区;
28、2.本发明采用双座椅操作模式,驾驶员主要负责机器人平台的运动,后舱操作手主要负责无人机和舱外机械手的操作,极大提高工作效率;
29、3.本发明携带两架无人机,在必要情况下,无人机可升空扩大救援,侦察视野;
30、4.本发明可安装两台机械手,在救援时,双臂协作,可实现复杂条件下的救援,提高救援效率;
31、5.本发明搭载了四个电驱动轮子,在路面平坦时,可更换轮子,提高移动速度;
32、6.本发明平台的各关节采用电驱动,极大提高关节响应速度,提高控制效率;
33、7.本发明平台的各关节采用模块化设计,方便在某关节损坏时及时快速地更换;
34、8.本发明平台采用电驱动避免了使用发动机等复杂传动系统,为平台维护保养提供了极大方便。
技术特征:
1.一种用于消防救援的可搭乘足式机器人平台,其特征在于:包括平台主体(1)、胯部电机(2)、大腿电机(3)、大腿(4)、小腿(5)、前排座椅(6)、后排座椅(7)、电驱动轮安装架(8)、无人机升降平台(9)、平台顶部护罩(10)和机械手安装平台(11);
2.根据权利要求1所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述胯部电机(2)包括胯部电机定子及外壳(15)、胯部电机转子(16)和电机转子六方连接部(17);所述胯部电机转子(16)一侧与所述胯部电机定子及外壳(15)连接,另一侧与所述电机转子六方连接部(17)连接;
3.根据权利要求2所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述大腿(4)截面由一个大圆弧和一个小圆弧连接而成;
4.根据权利要求3所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述小腿(5)截面由一个大圆弧和一个小圆弧连接而成;所述小腿(5)的大圆弧端设置有小腿关节电机(25);
5.根据权利要求3所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述电驱动轮安装架(8)上配备有电驱动轮;当路面平坦时,将所述小腿(5)从所述大腿(4)中卸下,把所述电驱动轮装配到所述大腿的电驱动轮换装位(22)中。
6.根据权利要求1所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述前排座椅(6)与所述平台主体(1)通过螺栓连接;所述前排座椅(6)采用阻尼液压缸减震。
7.根据权利要求1所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述后排座椅(7)从上到下依次包括座椅(26)、电推杆i(27)和减震平台(28)。
8.根据权利要求1所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述无人机升降平台(9)在未使用时,置于所述平台主体(1)的内部;使用时,通过电推杆ii将所述无人机升降平台(9)提升到所述平台主体(1)的顶部。
9.根据权利要求1所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述平台顶部护罩(10)与所述平台主体(1)顶部通过护罩安装铰链(14)连接;所述平台顶部护罩(10)为一半球形护罩;所述平台顶部护罩(10)的前方开设有护罩观察窗(29)。
10.根据权利要求1所述的一种用于消防救援的可搭乘足式机器人平台,其特征在于:所述机械手安装平台(11)为通用机械手安装底座,在不同工况下,装卸不同的机械手。
技术总结
本发明的目的是提供一种用于消防救援的可搭乘足式机器人平台,包括平台主体、胯部电机、大腿电机、大腿、小腿、前排座椅、后排座椅、无人机升降平台、平台顶部护罩和机械手安装平台。平台主体的顶部开设有通孔,通孔上方安装有平台顶部护罩。平台主体顶部两侧安装有机械手安装平台和无人机升降平台,平台主体的前方开设有平台观察窗,平台主体的侧面安装有四个电驱动轮安装架和四个胯部电机。胯部电机与大腿电机连接,大腿电机与大腿连接,大腿与小腿连接。本发明采用电驱动,极大减少了行动噪音,简化了结构,采用模块化设计,可以在平台故障时实现快速更换部件,无人机极大扩展探查视野,采用电机反馈阻尼模拟悬挂达到行进作业稳定。
技术研发人员:吴星元,糜正忠,周奇,彭赞,何曙光,王况寒,杜韩韩,刘馥铭,巫成江,陈涛
受保护的技术使用者:重庆铁马工业集团有限公司
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!