一种履带式行走机构及具有该机构的陆空两栖机器人的制作方法
本技术涉及机器人,具体而言,涉及一种履带式行走机构及具有该机构的陆空两栖机器人。
背景技术:
1、目前,两栖机器人具有可同时适应水陆两栖环境、多功能运动模式等技术优势;在机器人作业环境日益多元化和复杂化的情况下具有广阔的应用前景。
2、现有的两栖机器人为了增强行进时的稳定性,一般其底盘设计较低以及离地间隙较小,导致现有的两栖机器人爬坡和越障能力较差。
技术实现思路
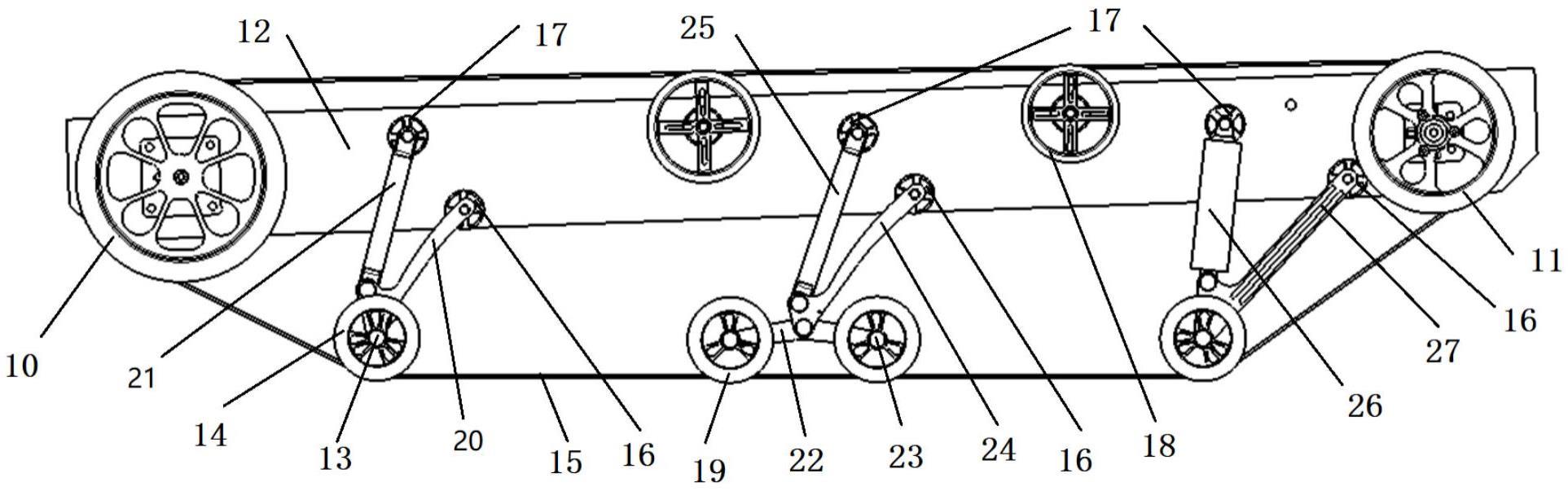
1、为了解决上述技术问题,第一方面,本实用新型实施例提供一种履带式行走机构,包括:传动机构和负重缓冲机构;
2、所述传动机构为所述履带式行走机构提供驱动力;
3、所述负重缓冲机构为所述履带式行走机构提供支撑力;
4、所述传动机构包括:履带、主动轮和从动轮;
5、所述负重缓冲机构包括:第一负重轮组和第二负重轮组;
6、所述履带套设于所述主动轮、所述从动轮、所述第一负重轮组和所述第二负重轮组的外侧;所述第一负重轮组靠近所述主动轮,所述第二负重轮组靠近所述从动轮。
7、第二方面,一种陆空两栖机器人,包括:本体、螺旋桨和至少一对第一方面中所述的履带式行走机构;
8、在所述本体上开设多个气流口;
9、所述螺旋桨安装于所述气流口内;
10、所述履带式行走机构对称设置在所述机器人本体的两侧。
11、本实用新型上述第一方面和第二方面提供的方案中,通过负重缓冲机构和传动机构之间的配合,与现有相关技术中传动机构为了增强稳定性导致底盘较低离地间隙较小相比,通过负重缓冲机构为传动机构提供缓冲力,进而提高了行走机构整体的离地间隙,使得爬坡和越障能力增强。
技术特征:
1.一种履带式行走机构,其特征在于,履带式行走机构包括:传动机构和负重缓冲机构;
2.根据权利要求1所述的履带式行走机构,其特征在于,所述第一负重轮组包括:第一摇臂、支撑杆和第一轮组组件;所述第一摇臂与所述支撑杆均连接于所述第一轮组组件;所述第一摇臂与所述支撑杆之间具有一定的夹角;
3.根据权利要求1所述的履带式行走机构,其特征在于,所述主动轮、所述从动轮分别位于所述履带式行走机构的尾部与所述履带式行走机构的头部,所述履带式行走机构的头部高于所述履带式行走机构的尾部。
4.根据权利要求1所述的履带式行走机构,其特征在于,所述从动轮处设置从动轮支架;所述从动轮支架包括:第一螺纹孔和第一螺钉;所述第一螺纹孔位于所述从动轮支架的中心处;所述第一螺钉穿过所述从动轮与所述第一螺纹孔螺纹连接。
5.根据权利要求1所述的履带式行走机构,其特征在于,所述从动轮中心轴的延长线沿水平方向向所述履带式行走机构的头部方向偏转。
6.根据权利要求2所述的履带式行走机构,其特征在于,所述第一轮组组件和所述第二轮组组件均包括:第一销轴和多个第一负重轮;所述第一摇臂底部和第二摇臂底部均设置有固定部;所述固定部与第一负重轮转动连接;所述第一销轴穿过固定部与两侧的第一负重轮连接;所述支撑杆与固定部之间、以及所述减震器与所述固定部之间均设置有第一减震销轴;所述支撑杆或所述减震器均通过所述第一减震销轴与固定部连接。
7.根据权利要求6所述的履带式行走机构,其特征在于,还包括:至少为一组的第三负重轮组;所述第三负重轮组位于所述第一负重轮组与所述第二负重轮组之间;所述第三负重轮组包括:支撑臂、第三摇臂、轮架、第二减震销轴、第二销轴和第二负重轮;所述第二负重轮为多个且平均分布于所述轮架前后两侧;所述支撑臂、所述第三摇臂之间具有一定夹角;所述第三摇臂一端与轮架连接;所述支撑臂通过第二减震销轴与第三摇臂转动连接;所述第二销轴穿过所述轮架与两侧所述第二负重轮连接。
8.根据权利要求7所述的履带式行走机构,其特征在于,所述传动机构还包括:惰轮、惰轮支架、减震支架和摇臂支架;所述惰轮安装于所述惰轮支架上;所述摇臂支架为多个且分别与所述第二摇臂、所述第一摇臂和所述第三摇臂连接;所述减震支架为多个且分别与所述减震器、所述支撑杆和所述支撑臂连接。
9.根据权利要求8所述的履带式行走机构,其特征在于:所述惰轮支架、减震支架和摇臂支架上均设置多个加强肋。
10.一种陆空两栖机器人,其特征在于,包括:本体、螺旋桨和至少一对上述权利要求1-9任一项所述的履带式行走机构;
技术总结
一种履带式行走机构及具有该机构的陆空两栖机器人,履带式行走机构包括:传动机构和负重缓冲机构。所述传动机构为所述履带式行走机构提供驱动力,所述负重缓冲机构为所述履带式行走机构提供支撑力。所述传动机构包括:履带、主动轮和从动轮。所述负重缓冲机构包括:第一负重轮组和第二负重轮组。所述履带套设于所述主动轮、所述从动轮、所述第一负重轮组和所述第二负重轮组的外侧。所述第一负重轮组靠近所述主动轮,所述第二负重轮组靠近所述从动轮。本申请实施例通过抬高本体的头部以及在从动轮下方安装传动机构,增大本体的离地间隙,越障能力得到提升。
技术研发人员:安子昂,樊伟,刘春桃
受保护的技术使用者:酷黑科技(北京)有限公司
技术研发日:20230104
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!