一种移动底盘及清洁机器人的制作方法
本技术涉及清洁机器人,尤其涉及一种移动底盘及清洁机器人。
背景技术:
1、现有技术中清洁机器人的移动底盘通过负压吸附的方式紧贴于待行走表面。材质为海绵的弹性密封件与待行走表面之间通过挤压形成负压吸附腔,使得移动底盘在移动过程中与待行走表面保持紧贴。由于弹性密封件在移动底盘移动过程中与待行走表面发生滑动摩擦,弹性密封件在移动底盘移动过程中不断磨损,使用寿命减少。此外,由于弹性密封件与待行走表面发生滑动摩擦,使得移动底盘的移动阻力大,增大了清洁机器人的工作能耗。
技术实现思路
1、本实用新型提供一种移动底盘,用以解决现有技术中移动底盘的吸附机构与待行走表面之间因滑动摩擦而阻力大的缺陷,实现了移动底盘与待行走表面之间滚动摩擦,在保证移动底盘具有良好贴壁性能的前提下,减小移动底盘移动受到的阻力。
2、本实用新型提供一种移动底盘,包括:
3、底盘主体;
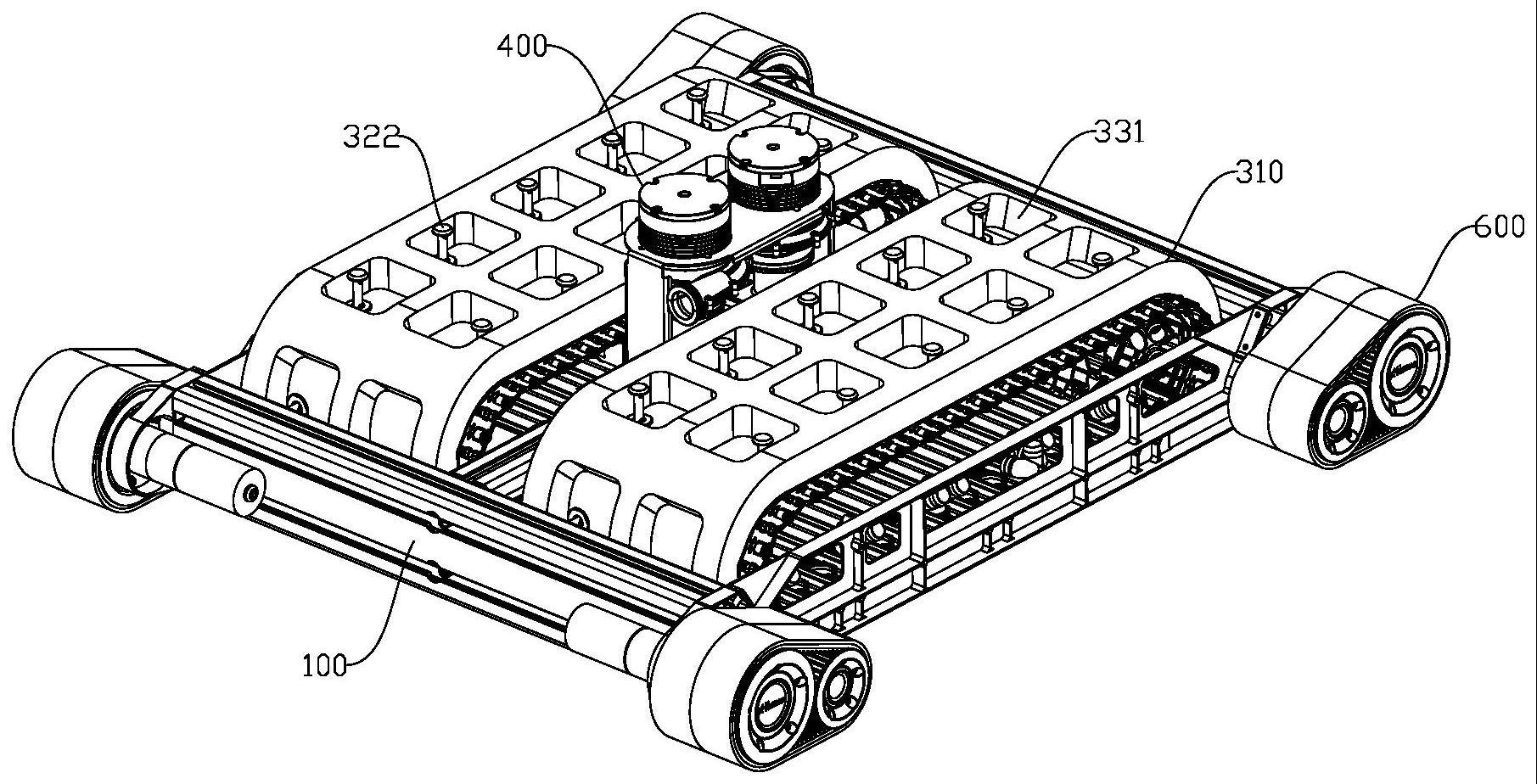
4、吸附部件,包括旋转件、负压组件和多个吸附机构,所述旋转件可转动地设置于所述底盘主体,多个所述吸附机构设置于所述旋转件,所述负压组件与所述吸附机构连通,所述负压组件用于使所述吸附机构处于负压状态,以使所述吸附机构吸附于所述待行走表面。
5、根据本实用新型实施例提供的一种移动底盘,多个所述吸附机构间隔布置于所述旋转件,所述吸附机构包括设置于所述旋转件表面的吸盘腔或吸盘,所述吸盘腔在所述旋转件的表面具有开口。
6、根据本实用新型实施例提供的一种移动底盘,所述负压组件包括:
7、负压件;
8、多个开关阀,多个所述开关阀一一对应地设置于多个所述吸盘腔内,所述负压件与多个所述开关阀连通,所述开关阀用于与所述待行走表面接触时打开,以使所述负压件与所述吸盘腔导通;并在所述吸盘腔与所述待行走表面分离时关闭,以使所述负压件与所述吸盘腔断开。
9、根据本实用新型实施例提供的一种移动底盘,所述开关阀包括:
10、阀体,设置于所述吸盘腔内,所述阀体内部具有空腔,所述阀体设置有与所述空腔连通的抽气口和进气口,所述进气口位于所述阀体的一端,所述抽气口位于所述阀体的侧壁,所述抽气口与所述负压件连通,所述进气口与所述吸盘腔连通;
11、弹性件,设置于所述空腔内,所述弹性件的第一端与所述阀体抵接;
12、顶杆,所述顶杆的第一端可滑动地插设于所述进气口,所述进气口的内边沿设置有密封圈,所述顶杆的第一端设置有密封部,所述密封部与所述弹性件的第二端抵接,所述密封部与所述密封圈密封配合;所述顶杆的第二端突出于所述吸盘腔的开口。
13、根据本实用新型实施例提供的一种移动底盘,所述顶杆的第二端设置有接触部,所述接触部的外径大于所述顶杆的外径。
14、根据本实用新型实施例提供的一种移动底盘,所述负压组件包括:
15、多个单向阀,多个所述单向阀一一对应地设置于多个所述吸盘内,所述单向阀的进气端口与所述吸盘的内部连通,所述单向阀的出气端口与所述吸盘的外部连通。
16、根据本实用新型实施例提供的一种移动底盘,所述负压组件还包括:
17、旋转配气件,所述旋转配气件的第一接口与所述负压件连通,所述旋转配气件的第二接口与所述抽气口连通。
18、根据本实用新型实施例提供的一种移动底盘,还包括:
19、转向部件,包括升降组件和转动组件,所述升降组件设置于所述底盘主体的底部,所述升降组件适于在伸出状态和缩回状态之间切换,在所述伸出状态,所述升降组件与所述待行走表面抵接,在所述缩回状态,所述升降组件与所述待行走表面分离;所述转动组件与所述升降组件连接以及所述底盘主体连接,所述转动组件用于驱动所述底盘主体转动。
20、根据本实用新型实施例提供的一种移动底盘,所述升降组件包括:
21、连接柱,所述连接柱的第一端与所述底盘主体上下活动连接;
22、升降传动机构,与所述连接柱连接;
23、升降驱动机构,与所述升降传动机构以及所述转动组件连接。
24、本实用新型还提供一种清洁机器人,包括清洁装置和上述任意一项所述移动底盘,所述清洁装置设置于所述移动底盘。
25、本实用新型实施例提供的移动底盘,将多个吸附机构设置于与底盘主体转动配合的旋转件。当底盘主体移动时,多个吸附机构可以交替地与待行走表面接触吸附或脱离,保证移动底盘具有良好的贴壁性能。通过将移动底盘与待行走表面之间的滑动摩擦替换为滚动摩擦,在保证移动底盘具有良好贴壁性能的前提下,减小移动底盘移动受到的阻力,提高移动底盘移动的灵活性。
技术特征:
1.一种移动底盘,其特征在于,包括:
2.根据权利要求1所述的移动底盘,其特征在于,多个所述吸附机构间隔布置于所述旋转件,所述吸附机构包括设置于所述旋转件表面的吸盘腔或吸盘,所述吸盘腔在所述旋转件的表面具有开口。
3.根据权利要求2所述的移动底盘,其特征在于,所述负压组件包括:
4.根据权利要求3所述的移动底盘,其特征在于,所述开关阀包括:
5.根据权利要求4所述的移动底盘,其特征在于,所述顶杆的第二端设置有接触部,所述接触部的外径大于所述顶杆的外径。
6.根据权利要求2所述的移动底盘,其特征在于,所述负压组件包括:
7.根据权利要求4或5所述的移动底盘,其特征在于,所述负压组件还包括:
8.根据权利要求1至6中任意一项所述的移动底盘,其特征在于,还包括:
9.根据权利要求8所述的移动底盘,其特征在于,所述升降组件包括:
10.一种清洁机器人,其特征在于,包括清洁装置和权利要求1至9中任意一项所述移动底盘,所述清洁装置设置于所述移动底盘。
技术总结
本技术提供一种移动底盘及清洁机器人,涉及清洁机器人技术领域。移动底盘包括底盘主体和吸附部件。吸附部件包括旋转件、负压组件和多个吸附机构。旋转件可转动地设置于底盘主体,多个吸附机构设置于旋转件。负压组件用于使吸附机构处于负压状态,以使吸附机构吸附于待行走表面。移动底盘将多个吸附机构设置于与底盘主体转动配合的旋转件。当底盘主体移动时,多个吸附机构可以交替地与待行走表面接触吸附或脱离,保证移动底盘具有良好的贴壁性能。通过将移动底盘与待行走表面之间的滑动摩擦替换为滚动摩擦,在保证移动底盘具有良好贴壁性能的前提下,减小移动底盘移动受到的阻力,提高移动底盘移动的灵活性。
技术研发人员:梁杰,曾德杰
受保护的技术使用者:凌度(广东)智能科技发展有限公司
技术研发日:20230109
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!