一种用于自行车的驱动、变速、增速结构的制作方法
本技术涉及自行车,特别涉及一种用于自行车的驱动、变速、增速结构。
背景技术:
1、现在市场普遍使用的非能源驱动的人力自行车,多以人通过蹬踏脚蹬子联动曲柄、齿盘、链条、飞轮驱动车轮使之前行。而变速则通过多层齿盘、多层飞轮的直径变化(齿数多寡)来实现的,其工艺要求精,复杂,成本相对偏高,且单齿盘飞轮不易于实现变速。
技术实现思路
1、本实用新型的目的是提供一种用于自行车的驱动、变速、增速结构,用杠杆取代齿盘拉动链条,来牵引飞轮使车轮前行,而且对称于后车轮两侧实施,从而形成双驱动,即通过左右脚交替蹬踏即可驱动车轮前行,其变速、省力都是通过伸长或缩短动力臂的同时,缩短或伸长阻力臂或单独调节动力臂上的附臂致使连带脚蹬子距支点轴远近来实现的。
2、为了达到上述目的,本实用新型采用的主要技术方案包括:
3、一种用于自行车的驱动、变速、增速结构,包括:
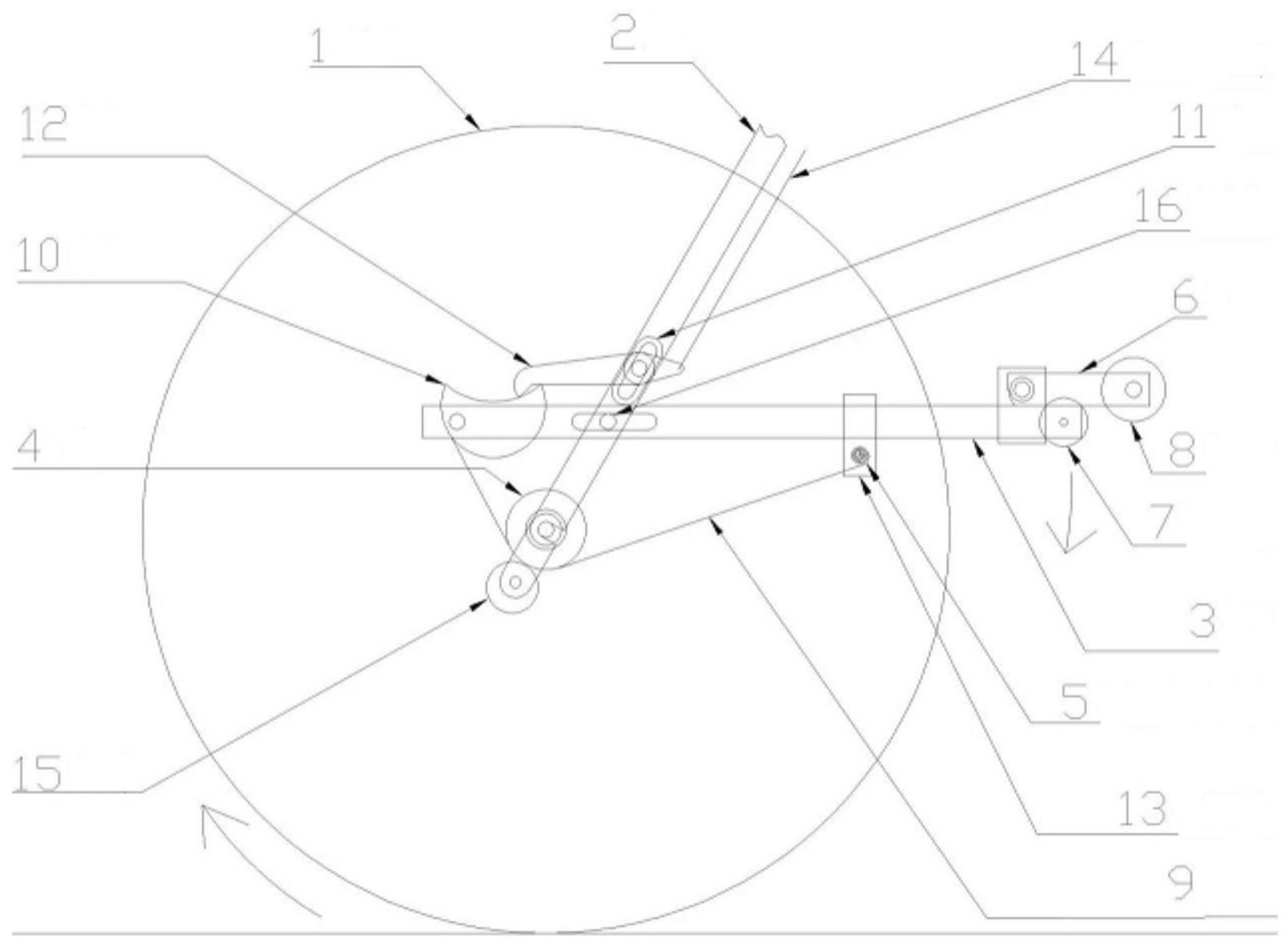
4、用于安装后轮的斜叉,所述斜叉上安装有用于驱动所述后轮的摆臂杠杆,所述后轮的轴皮上安装有飞轮,所述摆臂杠杆的阻力臂上安装有凸轮,所述凸轮和补偿器涡卷簧之间安装有链条,且所述链条与所述飞轮齿牙啮合,所述斜叉上且对应所述凸轮的位置安装有凸轮制动柄,所述斜叉上凸轮制动柄旁安装有凸轮制动拉杆,所述斜叉与摆臂杠杆剪刀式连接处设置有支点轴,所述摆臂杠杆与斜叉支点轴交汇处的摆臂设有长孔。
5、优选地,所述摆臂杠杆的动力臂前端装有附臂,且所述附臂上装有脚蹬子。
6、优选地,所述摆臂杠杆动力臂前端外部内侧装有摆臂杠杆伸缩调节旋钮。
7、优选地,所述斜叉上安装有摆臂杠杆限位器。
8、优选地,所述摆臂杠杆的动力臂上装有补偿器涡卷簧及链条调节锁箍。
9、优选地,两个所述斜叉在适度范围内平行且同时垂直于车轮轴以及支点轴。
10、优选地,所述摆臂杠杆阻力臂上的凸轮及斜叉上的凸轮制动柄相匹配。
11、优选地,所述斜叉的下端还加装护链偏心轮,其用于防止链条与飞轮意外脱离啮合。
12、本实用新型至少具备以下有益效果:
13、本实用新型中,用杠杆原理是本发明创造的主要特点,巧妙的利用摆臂杠杆的动力臂与阻力臂经支点轴前后移动的长短转化及其摆动来实现对链条、飞轮牵引前行、变速。因为骑行方式由圆周蹬踏改为上下蹬踏的变化,有利于骑行人站立骑行,可较长时间站立骑行;站立骑行时由于在人体的重力参与作用下会骑行省力。可使前后车轮轴距适当缩短,使车身缩短,车身简捷精干;蹬踏方式灵活多样:即可双脚交替蹬踏也可同时蹬踏,即可全部蹬踏也可部分蹬踏;相比多层齿盘、多层飞轮的结构,本实用新型的制作成本明显偏低,制作工艺精巧新颖、结构简单,组装方便快捷。本实用新型使单一飞轮实现无极变速、增速成为可能。本实用新型之结构部件若能采用碳纤维材料更能体现其轻松快捷。
技术特征:
1.一种用于自行车的驱动、变速、增速结构,其特征在于,包括:
2.根据权利要求1所述的一种用于自行车的驱动、变速、增速结构,其特征在于:所述摆臂杠杆(3)的动力臂前端装有附臂(6),且所述附臂(6)上装有脚蹬子(8)。
3.根据权利要求2所述的一种用于自行车的驱动、变速、增速结构,其特征在于:所述摆臂杠杆(3)动力臂前端外部内侧装有摆臂杠杆伸缩调节旋钮(7)。
4.根据权利要求1所述的一种用于自行车的驱动、变速、增速结构,其特征在于:所述斜叉(2)上安装有摆臂杠杆限位器(11)。
5.根据权利要求3所述的一种用于自行车的驱动、变速、增速结构,其特征在于:所述摆臂杠杆(3)的动力臂上装有补偿器涡卷簧(5)及链条调节锁箍(13)。
6.根据权利要求1或4所述的一种用于自行车的驱动、变速、增速结构,其特征在于:两个所述斜叉(2)在适度范围内平行且同时垂直于车轮轴以及支点轴(16)。
7.根据权利要求1或5所述的一种用于自行车的驱动、变速、增速结构,其特征在于:所述摆臂杠杆(3)阻力臂上的凸轮(10)及斜叉(2)上的凸轮制动柄(12)相匹配。
8.根据权利要求1或4所述的一种用于自行车的驱动、变速、增速结构,其特征在于:所述斜叉(2)的下端还加装护链偏心轮(15),其用于防止链条(9)与飞轮(4)意外脱离啮合。
技术总结
本技术公开一种用于自行车的驱动、变速、增速结构,包括:用于安装后车轮的斜叉,斜叉还安装驱动车轮的摆臂杠杆,车轮的轴皮安装有飞轮,摆臂与斜叉用支点轴连接形成剪刀式,摆臂杠杆的阻力臂上安装有凸轮;补偿器与凸轮之间经飞轮安装有链条连接,链条与飞轮齿牙啮合,斜叉装有对应摆臂杠杆阻力臂凸轮位置相匹配的凸轮制动柄,用杠杆取代齿盘拉动链条牵引飞轮使车轮前行。该结构对称于车轮两侧实施,从而形成双驱动。即可以通过双脚交替蹬踏脚蹬子驱动车轮前行。其省力减速、费力加速的变速都是通过摆臂杠杆伸长或缩短动力臂的同时,缩短或伸长阻力臂实现的。当然也可以通过单独前后移动动力臂上的附臂来实现省力减速或费力增速骑行。
技术研发人员:孟令来,孟祥祯,王桂全,康文波
受保护的技术使用者:孟令来
技术研发日:20230301
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!