一种六自由度双足仿生运动机器人的制作方法
本技术涉及机器人,具体为一种六自由度双足仿生运动机器人。
背景技术:
1、传统移动机器人主要包括履带式移动机器人、轮式移动机器人,相对上述两种机器人,足式机器人能更好适应于外部环境,可在不规则和较为复杂的地面行进,并具备一定越障能力。
2、现有的机器人有如下缺陷:
3、现有机器人的四肢都是一组一组进行驱动的,从而导致机器人不灵活,进一步也不能控制机器人四肢做出高难度动作,在面度坎坷道路时也无法灵活行走。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种六自由度双足仿生运动机器人,解决了现有机器人的四肢都是一组一组进行驱动的,从而导致机器人不灵活,进一步也不能控制机器人四肢做出高难度动作,在面度坎坷道路时也无法灵活行走的问题。
3、(二)技术方案
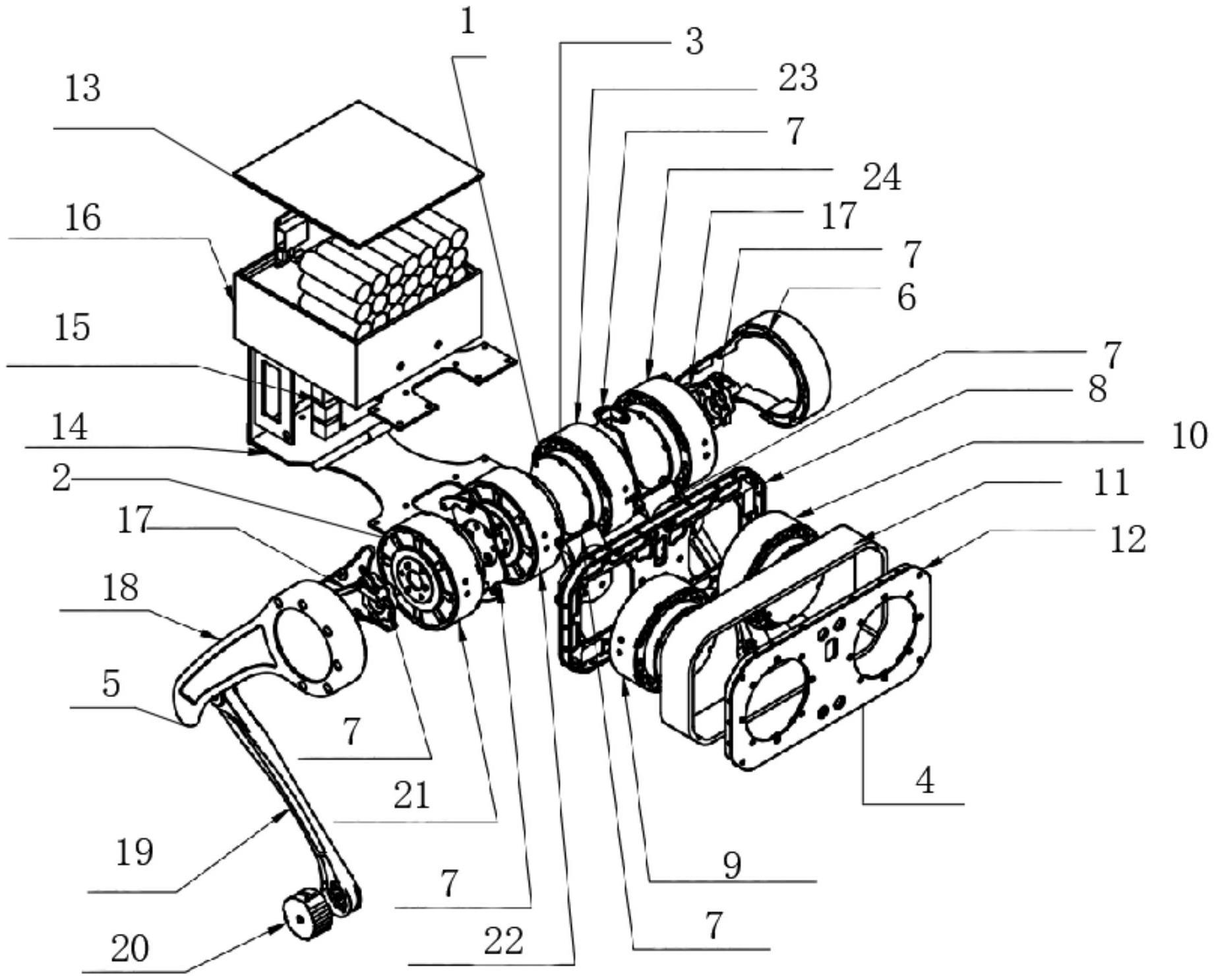
4、为实现以上目的,本实用新型通过以下技术方案予以实现:一种六自由度双足仿生运动机器人,包括装置本体,所述装置本体包括前端驱动装置、后端驱动装置、引擎装置、前支撑腿、后支撑腿、紧固件和电源装置,所述前端驱动装置通过紧固件固定在后端驱动装置前端,所述前支撑腿通过紧固件安装在前端驱动装置前端,所述后支撑腿通过紧固件安装在后端驱动装置后端,所述引擎装置通过紧固件安装在前端驱动装置和后端驱动装置右侧,所述电源装置固定在前端驱动装置和后端驱动装置左侧;
5、优选的,所述前端驱动装置包括第三关节电机和第四关节电机,所述第三关节电机通过紧固件固定在第四关节电机前端;
6、优选的,所述后端驱动装置包括第五关节电机和第六关节电机,所述第五关节电机通过紧固件安装在第六关节电机前端,所述第五关节电机前端通过紧固件与第四关节电机相连接。
7、优选的,所述前支撑腿和后支撑腿均包括连接杆、大腿、小腿,所述连接杆安装在大腿顶部内侧,所述小腿通过转轴呈倾斜方式安装在大腿底部,所述小腿底部外侧设有足端。
8、优选的,所述引擎装置包括后擎盖、第一关节电机、第二关节电机、外壳和前擎盖,所述外壳安装在前擎盖后端,所述第一关节电机和第二关节电机均安装在外壳内,所述后擎盖固定在外壳后端。
9、优选的,所述电源装置包括后支架盖板、主控制器单元和电池组及电源控制单元模块,所述主控制器单元安装在后支架盖板顶部,所述电池组及电源控制单元模块安装在主控制器单元顶部。
10、(三)有益效果
11、本实用新型提供了一种六自由度双足仿生运动机器人。具备以下有益效果:
12、该种十二自由度四足仿生运动机器人可以有效地达到四肢灵活运行的目的,进一步在面对崎岖道路时,机器人也可以很好的在崎岖道路上进行驱动,而该种机器人四条腿均通过单独的电机进行控制,从而可以控制腿驱动的快慢和幅度,进一步就可以提高机器人在崎岖道路的稳定性,进一步大大提高了机器人在驱动时的灵活性。
技术特征:
1.一种六自由度双足仿生运动机器人,其特征在于:包括装置本体(1),所述装置本体(1)包括前端驱动装置(2)、后端驱动装置(3)、引擎装置(4)、前支撑腿(5)、后支撑腿(6)、紧固件(7)和电源装置(13),所述前端驱动装置(2)通过紧固件(7)固定在后端驱动装置(3)前端,所述前支撑腿(5)通过紧固件(7)安装在前端驱动装置(2)前端,所述后支撑腿(6)通过紧固件(7)安装在后端驱动装置(3)后端,所述引擎装置(4)通过紧固件(7)安装在前端驱动装置(2)和后端驱动装置(3)右侧,所述电源装置(13)固定在前端驱动装置(2)和后端驱动装置(3)左侧;
2.根据权利要求1所述的一种六自由度双足仿生运动机器人,其特征在于:所述前支撑腿(5)和后支撑腿(6)均包括连接杆(17)、大腿(18)、小腿(19),所述连接杆(17)安装在大腿(18)顶部内侧,所述小腿(19)通过转轴呈倾斜方式安装在大腿(18)底部,所述小腿(19)底部外侧设有足端(20)。
3.根据权利要求1所述的一种六自由度双足仿生运动机器人,其特征在于:所述引擎装置(4)包括后擎盖(8)、第一关节电机(9)、第二关节电机(10)、外壳(11)和前擎盖(12),所述外壳(11)安装在前擎盖(12)后端,所述第一关节电机(9)和第二关节电机(10)均安装在外壳(11)内,所述后擎盖(8)固定在外壳(11)后端。
4.根据权利要求1所述的一种六自由度双足仿生运动机器人,其特征在于:所述电源装置(13)包括后支架盖板(14)、主控制器单元(15)和电池组及电源控制单元模块(16),所述主控制器单元(15)安装在后支架盖板(14)顶部,所述电池组及电源控制单元模块(16)安装在主控制器单元(15)顶部。
技术总结
本技术公开了一种六自由度双足仿生运动机器人,包括装置本体,所述装置本体包括前端驱动装置、后端驱动装置、引擎装置、前支撑腿、后支撑腿、紧固件和电源装置,所述前端驱动装置通过紧固件固定在后端驱动装置前端,所述前支撑腿通过紧固件安装在前端驱动装置前端,所述后支撑腿通过紧固件安装在后端驱动装置后端,所述引擎装置通过紧固件安装在前端驱动装置和后端驱动装置右侧,所述电源装置固定在前端驱动装置和后端驱动装置左侧。该种装置可以十分便捷对机器人的四条支撑腿进行单独控制,进一步提高了机器人的灵活性,还提高了机器人在面对崎岖道路时的通过性。
技术研发人员:陈朋朋
受保护的技术使用者:上海奥筠科技有限责任公司
技术研发日:20230309
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!