一种用于刀盘泥饼清理的可折展足式机器人的制作方法
本技术涉及清洗机器人,具体涉及一种用于刀盘泥饼清理的可折展足式机器人。
背景技术:
1、超大直径隧道具备空间尺寸大、通行能力大、土地集约等优势,已成为隧道工程发展的重要趋势;近些年超大直径盾构机在越江隧道、公路隧道、铁路隧道、公铁合建隧道等工程中的应用广泛。当前国内超大直径盾构项目方兴未艾,市场前景广阔。超大直径盾构机常压刀盘因人员可进入刀盘中空主梁更换滚刀、刮刀,更换刀具方便,无需带压操作,在超大直径盾构项目中应用较多;但超大直径盾构机常压刀盘也因为开挖直径大(大于14m)、中心约五米区域没有开口、整体开口率小(低于30%)、刀盘厚度大(大于2m)等结构特点,刀盘在掘进过程中容易淤积泥饼,在风化泥岩、粉质粘土等黏性地层结泥饼现象严重。泥饼会增加刀盘和刀具的负荷,导致刀盘、刀具磨损加剧,增加刀具消耗;泥饼严重时,将使刀盘失去掘削能力,对盾构掘进速度、施工安全造成极大威胁。
2、目前针对超大直径盾构常压刀盘结泥饼问题,主要采用增加环流系统流量、加大刀盘冲刷流量、调整掘进参数、添加化学分散剂泡仓等辅助措施,减缓刀盘泥饼生成,但尚未找到泥饼清除有效手段。为了清理刀盘泥饼,多数采用人工清理方法,人工清理需要准备工作多、投入大、工人劳动强度大、往往需要带压作业、危险系数高、作业效率低。当前已有部分超大直径盾构机配备刀盘高压水冲刷系统,但只能满足刀盘周边区域的局部冲刷,均属于固定冲刷点位,泥饼冲刷区域有限,尚无超大直径盾构机常压刀盘泥饼的移动冲刷有效方法。本专利为了解决上述问题,进行了相应的开发。
技术实现思路
1、本实用新型要解决的技术问题是,针对现有技术存在的上述缺陷,提供了一种用于刀盘泥饼清理的可折展足式机器人,能有效清除超大直径常压刀盘各区域泥饼,移动灵活,冲刷范围大,冲刷效果好,具备良好的社会、经济价值。
2、本实用新型为解决上述技术问题所采用的技术方案是:
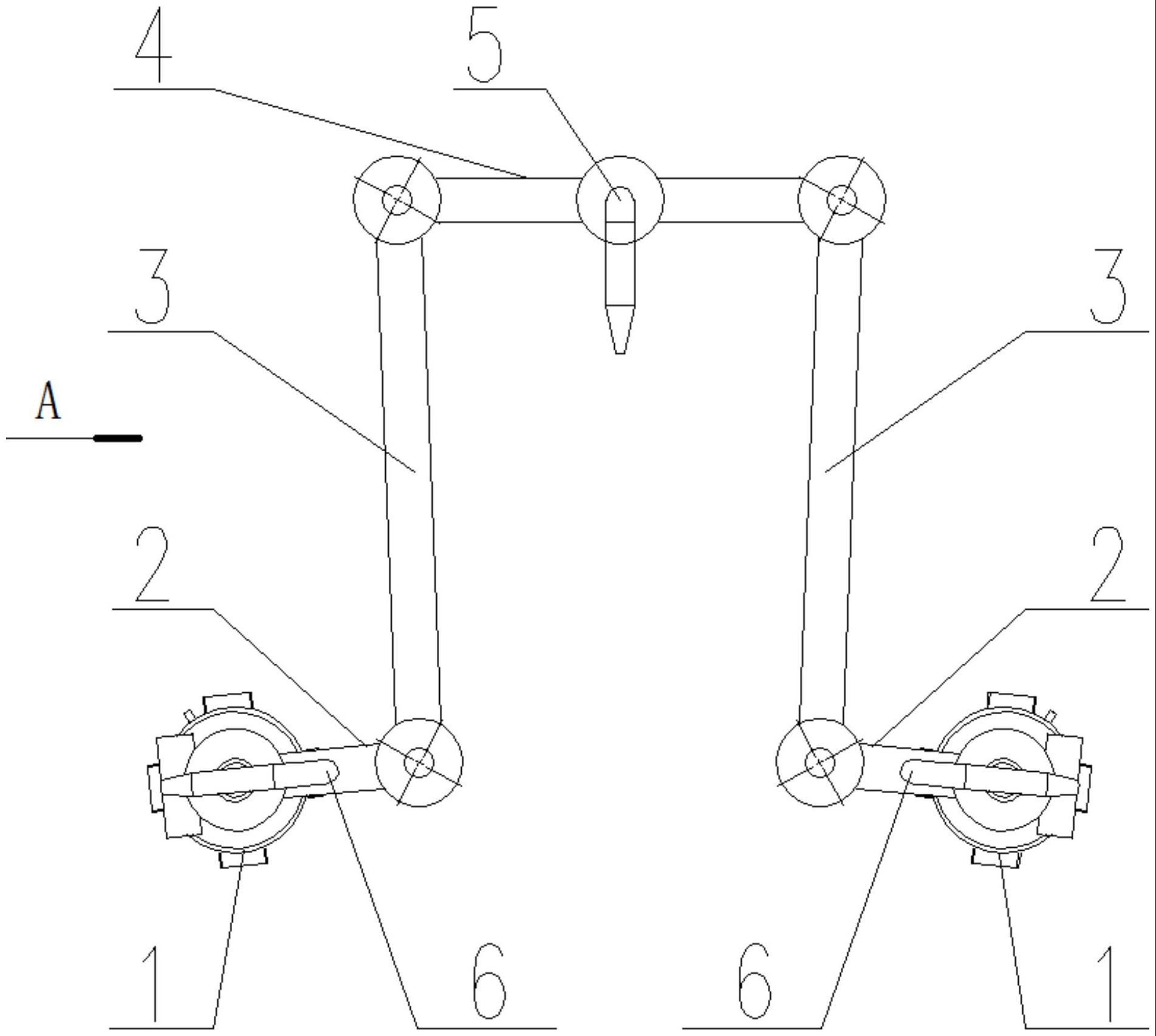
3、一种用于刀盘泥饼清理的可折展足式机器人,包括电磁足底、多个节段杆和旋转喷头,各节段杆之间通过节段销轴连接,每个节段销轴连接有节段驱动电机,旋转喷头设置于节段杆上,两个最外端节段杆上设有电磁足底。
4、按照上述技术方案,节段杆的个数为5个,分别为2个末端节段杆、2个边节段杆和1个中间节段杆,中间节段杆的两端分别通过节段销轴与2个边节段杆的一端连接,2个边节段杆的另一端与末端节段杆的一端连接,2个电磁足底通过足底销轴分别与2个末端节段杆的另一端连接。
5、按照上述技术方案,旋转喷头设置于中间节段杆上旋转喷头。
6、按照上述技术方案,2个末端节段杆上均设有旋转喷头。
7、按照上述技术方案,其中一个电磁足底,或其中一个节段杆上设有控制器,控制器分别与节段驱动电机、足底驱动电机和电磁足底连接。
8、按照上述技术方案,控制器连接有操控手柄。
9、按照上述技术方案,节段杆和/或电磁足底上设有摄像头,摄像头与控制器连接。
10、按照上述技术方案,旋转喷头连接有高压水管。
11、按照上述技术方案,最外的节段杆的外端通过足底销轴与电磁足底连接。
12、按照上述技术方案,各节段销轴相互平行,并与电磁足底底面垂直。
13、本实用新型具有以下有益效果:
14、1、本实用新型通过电磁足底吸附于刀盘上,通过节段驱动电机带动相应的节段销轴转动,使与相应节段销轴连接的两个节段杆发生相对转动,各节段杆可绕节段销轴周向旋转实现折展,两个电磁足底交替吸附于刀盘上,实现机器人可在刀盘表面自由移动行走,具备多处旋转冲刷功能,移动及冲洗范围大,即可移动至刀盘中心区域,也可移动至刀盘周边区域,满足超大直径常压刀盘泥饼的大范围、移动清理需要;机器人采用线性拓扑结构,折叠状态下体积小巧,具有较高折展比,能够穿越刀盘刀具间的狭小空间,满足穿行要求,可兼容现有超大直径盾构机人舱及常压刀盘刀筒结构,无需对现有常压刀盘进行改造。
15、2、机器人采用同时具备视频探测及人仓外远程遥操作功能,自动化程度高。
技术特征:
1.一种用于刀盘泥饼清理的可折展足式机器人,其特征在于,包括多个节段杆和旋转喷头,各节段杆之间通过节段销轴连接,每个节段销轴连接有节段驱动电机,旋转喷头设置于节段杆上,两个最外端节段杆上设有电磁足底。
2.根据权利要求1所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,节段杆的个数为5个,分别为2个末端节段杆、2个边节段杆和1个中间节段杆,中间节段杆的两端分别通过节段销轴与2个边节段杆的一端连接,2个边节段杆的另一端与末端节段杆的一端连接,2个电磁足底通过足底销轴分别与2个末端节段杆的另一端连接。
3.根据权利要求2所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,旋转喷头设置于中间节段杆上旋转喷头。
4.根据权利要求2所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,2个末端节段杆上均设有旋转喷头。
5.根据权利要求1所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,电磁足底,或节段杆上设有控制器,控制器分别与节段驱动电机和电磁足底连接。
6.根据权利要求5所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,控制器连接有操控手柄。
7.根据权利要求6所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,节段杆和/或电磁足底上设有摄像头,摄像头与控制器连接。
8.根据权利要求1所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,旋转喷头连接有高压水管。
9.根据权利要求1所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,最外的节段杆的外端通过足底销轴与电磁足底连接。
10.根据权利要求1所述的用于刀盘泥饼清理的可折展足式机器人,其特征在于,各节段销轴相互平行,并与电磁足底底面垂直。
技术总结
本技术公开了一种用于刀盘泥饼清理的可折展足式机器人,包括多个节段杆和旋转喷头,各节段杆之间通过节段销轴连接,每个节段销轴连接有节段驱动电机,旋转喷头设置于节段杆上,两个最外端节段杆上设有电磁足底。本技术能有效清除超大直径常压刀盘各区域泥饼,移动灵活,冲刷范围大,冲刷效果好,具备良好的社会、经济价值。
技术研发人员:张琨,王开强,孙庆,王志云,邢朋飞,冯文强,李楠,佟志忠,刘开扬,谷海华,胡海瑞,朱晓冬,吴剑波,王畅,崔立山,刘汉凯,任文豪
受保护的技术使用者:中建三局集团有限公司
技术研发日:20230316
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!