一种轮足机器人的制作方法
【】本技术涉及机器人领域,尤其涉及一种轮足机器人。
背景技术
0、
背景技术:
1、轮足机器人是高科技产品的典型,是人们设置指定的程序通过中控系统实现机器人横移、越障、爬坡、跨沟、转弯等多种功能的高科技智能化产品。它可代替人类在某些领域力所不能及的地方实现特定的任务和功能,能在有害环境下代替人类工作,侦查,排险等,尤其是检测装置和机械臂可升降的机器人,可以满足多种高度。
2、但轮足机器人的机械臂在转动时,其车轮的方向往往也相应发生改变,导致定向移动存在偏差,移动精准度差。
技术实现思路
0、
技术实现要素:
1、为解决轮足机器人移动精准度差的问题,本实用新型提供了一种轮足机器人。
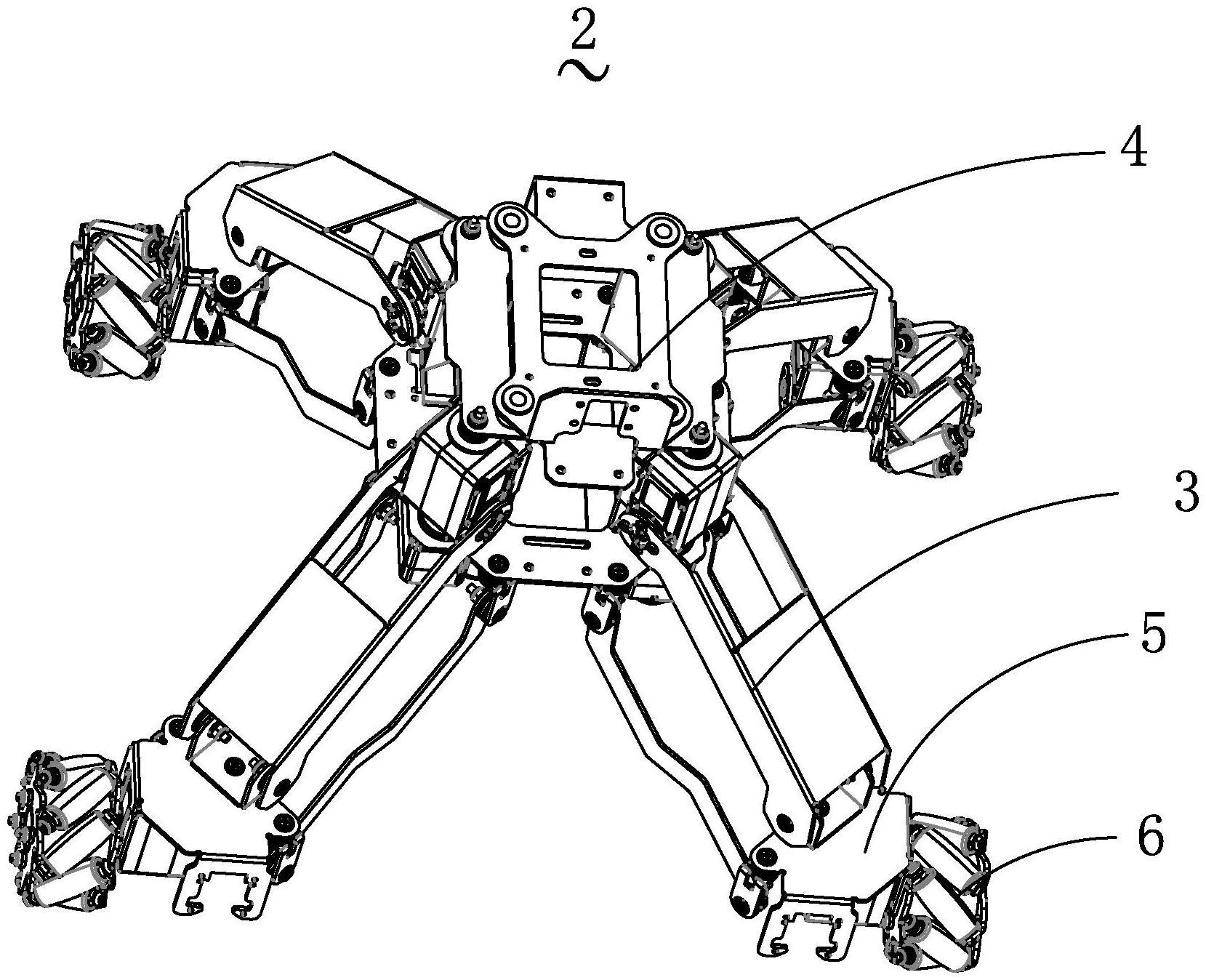
2、本实用新型解决技术问题的方案是提供一种轮足机器人,包括机械臂、基座、连接块以及车轮,所述机械臂与所述基座转动连接,所述机械臂包括第一连接件和第二连接件,所述第一连接件相对两端其中之一与所述基座转动连接,另一端与所述连接块转动连接;所述第二连接件相对两端其中之一与所述基座转动连接,另一端与所述连接块转动连接,所述第一连接件、所述第二连接件、所述基座和所述连接块构成第一平行四边形机构,所述车轮与所述连接块固定连接。
3、优选地,所述机械臂包括第三连接件,所述第三连接件相对两端的其中一端与所述基座转动连接,另一端与所述连接块转动连接;所述第一连接件、所述第三连接件、所述基座、所述连接块构成第二平行四边形机构;所述第二连接件、所述第三连接件、所述基座、所述连接块构成第三平行四边形机构;所述第一平行四边形机构、所述第二平行四边形机构、所述第三平行四边形机构不处于同一平面内。
4、优选地,所述第三连接件设置为h型结构。
5、优选地,所述第三连接件与所述第一连接件的距离等于所述第三连接件与所述第二连接件的距离。
6、优选地,所述第三连接件开设有开口朝向所述第一连接件的第一凹口,当所述机械臂转动时,所述连接块可部分收纳于所述第一凹口中。
7、优选地,所述第一连接件和所述第二连接件在靠近所述基座一端开设有开口朝向所述第三连接件的第二凹口,当所述机械臂转动时,所述基座可部分收纳于所述第二凹口中;所述第一连接件和所述第二连接件在靠近所述连接块一端开设有开口朝向远离所述第三连接件的方向的第三凹口,当所述机械臂转动时,所述连接块可部分收纳于所述第三凹口中。
8、优选地,所述第一连接件、所述第二连接件、所述第三连接件分别与所述基座、所述连接块转动连接处对应设置有轴承。
9、优选地,所述机械臂设置于所述基座边缘轮廓转折处。
10、优选地,所述机械臂的数量至少为3个,所述连接块和所述车轮的数量对应所述机械臂设置为3个。
11、优选地,所述车轮使用麦克纳姆轮。
12、与现有技术相比,本实用新型的轮足机器人具有以下优点:
13、1.本实用新型的轮足机器人包括机械臂、基座、连接块和车轮,机械臂与基座转动连接,机械臂包括第一连接件和第二连接件,第一连接件相对两端其中之一与基座转动连接,另一端与连接块转动连接;第二连接件相对两端其中之一与基座转动连接,另一端与连接块转动连接,第一连接件、第二连接件、基座和连接块构成第一平行四边形机构,连接块与车轮固定连接;机械臂围绕基座转动时,连接块通过第一平行四边形机构围绕基座转动,同时连接块不发生自转,车轮也不发生自转,达到车轮跟随机械臂转动但其方向始终不变的效果,提高了轮足机器人的移动精准度。
14、2.本实用新型的机械臂包括第三连接件,第三连接件相对两端的其中一端与基座转动连接,另一端与连接块转动连接;第一连接件、第三连接件、基座、连接块构成第二平行四边形机构;第二连接件、第三连接件、基座、连接块构成第三平行四边形机构;第一平行四边形机构、第二平行四边形机构、第三平行四边形机构不处于同一平面内。使车轮能在多平面内围绕基座旋转,增大轮足机器人的灵活性,且车轮在围绕基座旋转时,其移动方向始终不变。
15、3.本实用新型的第三连接件设置为h型结构。提高第三连接件的强度,提高轮足机器人的稳定性。
16、4.本实用新型的第三连接件与第一连接件的距离等于第三连接件与第二连接件的距离,提高机械臂的强度,使机械臂在转动时不容易弯折。
17、5.本实用新型的第三连接件开设有开口朝向第一连接件的第一凹口。当机械臂转动时,连接块可部分收纳于第一凹口中,增大了机械臂的活动范围,也就增大了轮足机器人的灵活性,同时可达到轮足机器人便于收纳、易于携带的效果。
18、6.本实用新型的第一连接件和第二连接件在靠近基座一端开设有开口朝向第三连接件的第二凹口,当机械臂转动时,基座可部分收纳于第二凹口中;第一连接件和第二连接件在靠近连接块一端开设有开口朝向远离第三连接件的方向的第三凹口,当机械臂转动时,连接块可部分收纳于第三凹口中,增大了机械臂的活动范围,也就增大了轮足机器人的灵活性,同时可达到轮足机器人便于收纳、易于携带的效果。
19、7.本实用新型的第一连接件、第二连接件、第三连接件分别与基座、连接块转动连接处对应设置有轴承。减小各旋转配合的工件之间的摩擦力,保护各旋转配合的工件,提高轮足机器人的寿命。
20、8.本实用新型的机械臂设置于基座边缘轮廓转折处。进一步扩大机械臂相对基座的旋转范围,增大轮足机器人的灵活性。
21、9.本实用新型的机械臂的数量至少为3个,连接块和车轮的数量对应机械臂设置为3个。至少3个车轮才便于支撑基座平稳移动。
22、10.本实用新型的车轮使用麦克纳姆轮。麦克纳姆轮具备可斜向或横向移动的特点,配合轮足机器人使用可以进一步提高轮足机器人的机动性。
技术特征:
1.一种轮足机器人,其特征在于,包括机械臂、基座、连接块以及车轮,所述机械臂与所述基座转动连接,所述机械臂包括第一连接件和第二连接件,所述第一连接件相对两端其中之一与所述基座转动连接,另一端与所述连接块转动连接;所述第二连接件相对两端其中之一与所述基座转动连接,另一端与所述连接块转动连接,所述第一连接件、所述第二连接件、所述基座和所述连接块构成第一平行四边形机构,所述车轮与所述连接块固定连接。
2.如权利要求1所述的轮足机器人,其特征在于,所述机械臂包括第三连接件,所述第三连接件相对两端的其中一端与所述基座转动连接,另一端与所述连接块转动连接;所述第一连接件、所述第三连接件、所述基座、所述连接块构成第二平行四边形机构;所述第二连接件、所述第三连接件、所述基座、所述连接块构成第三平行四边形机构;所述第一平行四边形机构、所述第二平行四边形机构和所述第三平行四边形机构均不处于同一平面内。
3.如权利要求2所述的轮足机器人,其特征在于,所述第三连接件设置为h型结构。
4.如权利要求2所述的轮足机器人,其特征在于,所述第三连接件与所述第一连接件的距离等于所述第三连接件与所述第二连接件的距离。
5.如权利要求2所述的轮足机器人,其特征在于,所述第三连接件开设有开口朝向所述第一连接件的第一凹口,当所述机械臂转动时,所述连接块可部分收纳于所述第一凹口中。
6.如权利要求2所述的轮足机器人,其特征在于,所述第一连接件和所述第二连接件在靠近所述基座一端开设有开口朝向所述第三连接件的第二凹口,当所述机械臂转动时,所述基座可部分收纳于所述第二凹口中;所述第一连接件和所述第二连接件在靠近所述连接块一端开设有开口朝向远离所述第三连接件的方向的第三凹口,当所述机械臂转动时,所述连接块可部分收纳于所述第三凹口中。
7.如权利要求2所述的轮足机器人,其特征在于,所述第一连接件、所述第二连接件、所述第三连接件分别与所述基座、所述连接块转动连接处对应设置有轴承。
8.如权利要求1所述的轮足机器人,其特征在于,所述机械臂设置于所述基座边缘轮廓转折处。
9.如权利要求1所述的轮足机器人,其特征在于,所述机械臂的数量至少为3个,所述连接块和所述车轮的数量对应所述机械臂设置为3个。
10.如权利要求1所述的轮足机器人,其特征在于,所述车轮使用麦克纳姆轮。
技术总结
本技术涉及机器人领域,尤其涉及一种轮足机器人,包括机械臂、基座、连接块和车轮,机械臂与基座转动连接,机械臂包括第一连接件和第二连接件,第一连接件相对两端其中之一与基座转动连接,另一端与连接块转动连接;第二连接件相对两端其中之一与基座转动连接,另一端与连接块转动连接,第一连接件、第二连接件、基座和连接块构成第一平行四边形机构,连接块与车轮固定连接;机械臂围绕基座转动时,连接块通过第一平行四边形机构围绕基座转动,同时连接块不发生自转,车轮也不发生自转,达到车轮跟随机械臂转动但其方向始终不变的效果,提高了轮足机器人的移动精准度。
技术研发人员:张维良,邝奕文,余笃凯
受保护的技术使用者:深圳幸狐科技有限公司
技术研发日:20230314
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!