一种腿式四足机器人装置
本技术涉及足式机器人领域,尤其是一种腿式四足机器人装置。
背景技术:
1、现有机器人的运动方式主要包括有轮式、履带式、足式等,其中轮式机器人可在平坦地形高速移动,但遇到复杂地形,将大大增加能耗,甚至完全丧失行动能力,履带式机器更适合于松软地形行动而不陷入,但也存在跨越障碍能力弱等问题,足式器人则与上述两种机器人不同,凭借其在行走过程中与地面的非连续接触特性表现出了很强的适应性,仅需要一些离散的点供其落足,就可以成功通过崎岖、松软或泥泞的地面。尤其在不规则的复杂地形、工作场地上具有更广阔的发展前景,因此被广泛应用于抢险救灾、排雷排爆、地址勘探、娱乐及民用等领域。机器人的腿部是机器人的重要组成部分,对足式机器人运动起着非常重要的作用。因此要使足式机器人能够更好的工作,腿部的设计尤为重要。
2、目前足式机器人行走方向大多为单一的前后行走,往往存在行走时难以转向的问题,而且现有足式机器人在通过不平坦的复杂地形时,因机身一部分翘起或下陷而存在整体失去水平平稳的问题。
3、因此,如何设计一种足式机器人,使其在保持行走情况下仍能实现自由转向能力,且在通过不规则的复杂地形时仍能保持机体的整体水平平稳,是目前要解决的问题。
技术实现思路
1、本实用新型的目的是提供一种四足机器人装置,以解决上述技术问题,使机器人可以实现在行走状态下自由转向且通过不平坦复杂地形时仍能保持机体的整体水平平稳。
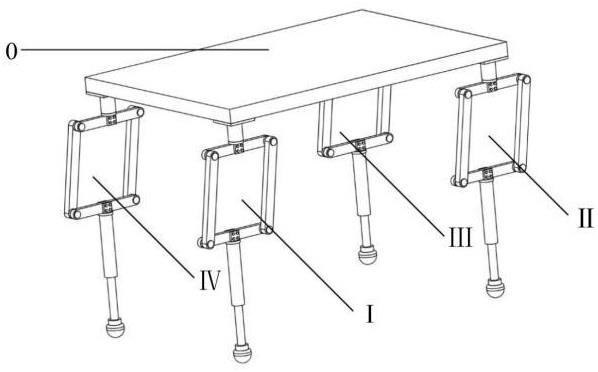
2、本实用新型的技术方案是:一种腿式四足机器人装置,包括躯体、行走腿一、行走腿二、行走腿三和行走腿四;其特征在于:四条行走腿结构相同,且对称分布与躯体两侧,四条行走腿均由七个连杆、五个转动副、一个移动副及一个足部传感器组成;其中连杆一一端通过转动副一与躯体联接,连杆一另一端与连杆二中部固定联接;连杆二一端通过转动副二与连杆三一端联接,连杆二另一端通过转动副三与连杆四一端联接;连杆五一端通过转动副四与连杆三另一端联接,连杆五另一端通过转动副五与连杆四另一端联接;连杆六一端与连杆五中部固定联接,连杆六另一端通过移动副与连杆七一端联接,连杆七另一端装有足部传感器。
3、进一步地,转动副二、转动副三、转动副四、转动副五的转动轴线相互平行,且分别与转动副一的转动轴线、移动副的轴线相互垂直,转动副一的转动轴线与移动副的轴线相互平行。
4、进一步地,行走腿一、行走腿二、行走腿三和行走腿四中,与躯体联接的四个转动副一的转动轴线相互平行。
5、进一步地,连杆二与连杆五的杆长相等,连杆三与连杆四的杆长相等,连杆二、连杆三、连杆四、连杆五与转动副二、转动副三、转动副四、转动副五组成平行四边形机构。
6、进一步地,足部传感器为接触力传感器,可实时判断足部是否与地面接触。
7、本实用新型的优点在于:本装置具有结构简单,行走过程中可始终保持躯体水平、稳定性好,无需转弯过程即可实现前后、左右、其他各方位的行走、运动灵活,控制简单,地形适应性好等优点。
技术特征:
1.一种腿式四足机器人装置,包括躯体(0)、行走腿一(ⅰ)、行走腿二(ⅱ)、行走腿三(ⅲ)和行走腿四(ⅳ);其特征在于:四条行走腿结构相同,且对称分布与躯体(0)两侧,四条行走腿均由七个连杆、五个转动副、一个移动副及一个足部传感器组成;其中连杆一(1)一端通过转动副一(r1)与躯体(0)联接,连杆一(1)另一端与连杆二(2)中部固定联接;连杆二(2)一端通过转动副二(r2)与连杆三(3)一端联接,连杆二(2)另一端通过转动副三(r3)与连杆四(4)一端联接;连杆五(5)一端通过转动副四(r4)与连杆三(3)另一端联接,连杆五(5)另一端通过转动副五(r5)与连杆四(4)另一端联接;连杆六(6)一端与连杆五(5)中部固定联接,连杆六(6)另一端通过移动副(p)与连杆七(7)一端联接,连杆七(7)另一端装有足部传感器(8)。
2.根据权利要求1所述的一种腿式四足机器人装置,其特征在于:转动副二(r2)、转动副三(r3)、转动副四(r4)、转动副五(r5)的转动轴线相互平行,且分别与转动副一(r1)的转动轴线、移动副(p)的轴线相互垂直,转动副一(r1)的转动轴线与移动副(p)的轴线相互平行。
3.根据权利要求1所述的一种腿式四足机器人装置,其特征在于:行走腿一(ⅰ)、行走腿二(ⅱ)、行走腿三(ⅲ)和行走腿四(ⅳ)中,与躯体(0)联接的四个转动副一(r1)的转动轴线相互平行。
4.根据权利要求1所述的一种腿式四足机器人装置,其特征在于:连杆二(2)与连杆五(5)的杆长相等,连杆三(3)与连杆四(4)的杆长相等,连杆二(2)、连杆三(3)、连杆四(4)、连杆五(5)与转动副二(r2)、转动副三(r3)、转动副四(r4)、转动副五(r5)组成平行四边形机构。
5.根据权利要求1所述的一种腿式四足机器人装置,其特征在于:足部传感器(8)为接触力传感器,可实时判断足部是否与地面接触。
技术总结
本技术涉及一种腿式四足机器人装置。主要由躯体和四条相同行走腿组成,四条行走腿对称分布于躯体两侧,均通过转动副与躯体联接。其中,四条行走腿均由七个连杆、五个转动副、一个移动副及一个足部传感器组成。与躯体联接的四个转动副轴线相互平行,每条行走腿中其余四个转动副轴线相互平行,且分别与与躯体联接的转动副轴线、移动副轴线相互垂直。本装置结构简单,行走过程中可始终保持躯体水平、稳定性好,无需转弯过程即可实现前后、左右、其他各方位的行走、运动灵活,控制简单,地形适应性好。
技术研发人员:谢冬福,张吉宝,蔡启凡,孙旭东,罗玉峰
受保护的技术使用者:华东交通大学
技术研发日:20230324
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!