一种可翻转六足步行机器人的制作方法
本技术涉及机器人,具体为一种可翻转六足步行机器人。
背景技术:
1、六足步行机器人又称蜘蛛机器人,是利用仿生学原理借鉴了六足昆虫的三角步态爬行原理,有良好的平衡感,进退自如,其控制简单、移动迅速平稳,并且具备跨越障碍的能力,可以适应各种复杂的地形地貌。
2、但是现有仿生六足步行机器人上下翻转后机器人腿无法进行翻转,其翻转后机器人腿不具备继续进行爬行的能力,难以更好的适应各种地形。
技术实现思路
1、针对上述存在的技术不足,本实用新型的目的是提供一种可翻转六足步行机器人,较好的解决了现有仿生六足步行机器人翻转后其机器人腿无法翻转继续进行爬行的问题。
2、为解决上述技术问题,本实用新型采用如下技术方案:
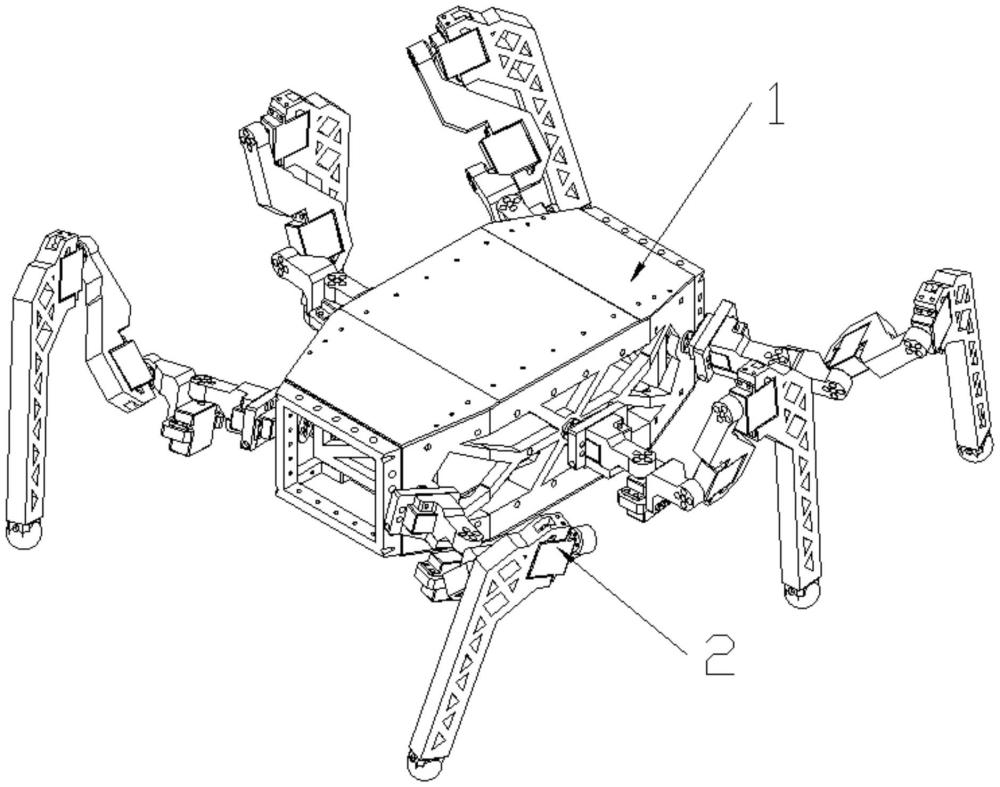
3、本实用新型提供一种可翻转六足步行机器人,包括机身结构和六条均布于所述机身结构左右两侧呈辐射状对称分布的机器人腿;所述机身结构由上部左横梁、下部左横梁、上部右横梁、下部右横梁、前上部支撑架、后上部支撑架、前下部支撑架、后下部支撑架、前x型支撑架、后x型支撑架、前模块窗口、后模块窗口、腿部支撑架、上保护壳体、下保护壳体通过螺栓连接组合呈八边形机身;所述前上部支撑架左右两端分别对应通过螺栓与上部左横梁前部内侧、上部右横梁前部内侧连接,所述后上部支撑架左右两端分别对应通过螺栓与上部左横梁后部内侧、上部右横梁后部内侧连接,组合成上部支撑架;所述前下部支撑架左右两端分别对应通过螺栓与下部左横梁前部内侧、下部右横梁前部内侧连接,所述后下部支撑架左右两端分别对应通过螺栓与下部左横梁后部内侧、下部右横梁后部内侧连接,组合成下部支撑架;所述前x型支撑架顶部通过螺栓与前上部支撑架底面连接,且前x型支撑架底部通过螺栓与前下部支撑架顶面连接;所述后x型支撑架顶部通过螺栓与后上部支撑架底面连接,且后x型支撑架底部通过螺栓与后下部支撑架底面连接,组合呈内部支撑架;
4、所述前模块窗口上下左右四角分别对应通过螺栓与内部支撑架前侧上下左右四角连接,且后模块窗口上下左右四角分别对应通过螺栓与内部支撑架后侧上下左右四角连接;所述内部支撑架左、右侧分别通过螺栓设置有一个腿部支撑架,分别为左腿支撑架、右腿支撑架;所述上保护壳体左、右两侧底面分别对应通过螺栓与左腿支撑架顶部、右腿支撑架顶部连接;所述下保护壳体左、右两侧顶部分别对应通过螺栓与左腿支撑架底面、右腿支撑架底面连接;所述内部支撑架内部底面设置有集成电路板,组合形成机身;
5、每条所述机器人腿均由第一机械关节组、第二机械关节组、第三机械关节组、第四机械关节组、机械足相互配合铰接组成;所述第一机械关节组由第一舵机、第一舵机锚、第一舵机锚架、第一节肢组成,且所述第一节肢底端与第一舵机锚架通过螺栓可拆卸连接,所述第一节肢后端与第一舵机锚通过螺栓可拆卸连接,所述第一舵机锚套设于第一舵机上,且第一舵机锚架左右两端与第一舵机锚后侧左右两端通过螺栓相互配合可拆卸连接;所述第二机械关节组由第二舵机、第二舵机锚、第二节肢组成,且所述第二节肢后端与第二舵机锚通过螺栓可拆卸连接,所述第二舵机锚套设于第一舵机上,且第二舵机锚与第一节肢铰接;所述第三机械关节组由第三舵机和第三节肢组成,且所述第三节肢套设于第三舵机上,所述第三舵机与第二节肢铰接;所述第四机械关节组第四舵机和第四节肢组成,且所述第四节肢套设于第四舵机上,所述第四舵机与第三节肢铰接;所述机械足与第四节肢铰接,组合形成机器人腿;
6、所述机身左、右两侧分别对称均匀设置有3个机器人腿,且所述机身所述第一舵机通过螺栓与腿部支撑框架可拆卸连接,形成可翻转六足步行机器人。
7、优选地,所述上部左横梁、下部左横梁、上部右横梁、下部右横梁结构相同,且均由2根短横梁通过螺栓连接件紧固连接形成。
8、优选地,所述机身结构采用动力学原理进行上下、左右对称设置,用于方便机器人上下翻转后通过机器人腿继续进行爬行。
9、优选地,每条所述机器人腿均为结构相同的模块化设计,且机器人腿设置为四个自由度,用于方便机器人腿翻转,使得机器人通过机器人腿继续进行爬行。
10、优选地,所述机身结构上具有姿态传感器;所述可翻转六足步行机器人通过姿态传感器判断自身机身的姿态为顶面朝上或者底面朝上,当机身姿态从正面朝上转变为底面朝上或者机身姿态从底面朝上转变为正面朝上时,每条所述机器人腿均进行翻转直至初始状态。
11、本实用新型的有益效果在于:本实用新型中的该可翻转六足步行机器人,机身结构根据动力学原理上下、左右对称设置,通过设置具有4个自由度的六条完全相同的可翻转机器人腿,使得机器人在上下翻转后可以通过翻转六条腿而非机身进而继续爬行,较好的解决了现有仿生六足步行机器人翻转后其机器人腿无法翻转继续进行爬行的问题,同时更加优化了机器人的地形适应能力。
技术特征:
1.一种可翻转六足步行机器人,其特征在于:包括机身结构和六条均布于所述机身结构左右两侧呈辐射状对称分布的机器人腿;所述机身结构由上部左横梁、下部左横梁、上部右横梁、下部右横梁、前上部支撑架、后上部支撑架、前下部支撑架、后下部支撑架、前x型支撑架、后x型支撑架、前模块窗口、后模块窗口、腿部支撑架、上保护壳体、下保护壳体通过螺栓连接组合呈八边形机身;所述前上部支撑架左右两端分别对应通过螺栓与上部左横梁前部内侧、上部右横梁前部内侧连接,所述后上部支撑架左右两端分别对应通过螺栓与上部左横梁后部内侧、上部右横梁后部内侧连接,组合成上部支撑架;所述前下部支撑架左右两端分别对应通过螺栓与下部左横梁前部内侧、下部右横梁前部内侧连接,所述后下部支撑架左右两端分别对应通过螺栓与下部左横梁后部内侧、下部右横梁后部内侧连接,组合成下部支撑架;所述前x型支撑架顶部通过螺栓与前上部支撑架底面连接,且前x型支撑架底部通过螺栓与前下部支撑架顶面连接;所述后x型支撑架顶部通过螺栓与后上部支撑架底面连接,且后x型支撑架底部通过螺栓与后下部支撑架底面连接,组合呈内部支撑架;
2.如权利要求1所述的一种可翻转六足步行机器人,其特征在于:所述上部左横梁、下部左横梁、上部右横梁、下部右横梁结构相同,且均由2根短横梁通过螺栓连接件紧固连接形成。
3.如权利要求1所述的一种可翻转六足步行机器人,其特征在于:所述机身结构采用动力学原理进行上下、左右对称设置。
4.如权利要求1所述的一种可翻转六足步行机器人,其特征在于:每条所述机器人腿均为结构相同的模块化设计,且机器人腿设置为四个自由度。
5.如权利要求1所述的一种可翻转六足步行机器人,其特征在于:所述机身结构上具有姿态传感器;所述可翻转六足步行机器人通过姿态传感器判断自身机身的姿态为顶面朝上或者底面朝上,当机身姿态从正面朝上转变为底面朝上或者机身姿态从底面朝上转变为正面朝上时,每条所述机器人腿均进行翻转直至初始状态。
技术总结
本技术公开了一种可翻转六足步行机器人,包括机身结构和六条机器人腿;所述机身结构由内部支撑架、前模块窗口、后模块窗口、腿部支撑架、上保护壳体、下保护壳体通过螺栓连接组合呈八边形机身;支撑框架内部底面设置有集成电路板;每条机器人腿均由第一机械关节组、第二机械关节组、第三机械关节组、第四机械关节组、机械足相互配合铰接组成;机身左、右两侧分别对称均匀设置有3个机器人腿,且每条机器人腿均为相同结构模块化设计。通过该设置具有4个自由度的六条可翻转机器人腿,使得机器人翻转后可以通过翻转六条腿继续爬行,较好的解决了现有仿生六足步行机器人翻转后其机器人腿无法翻转继续进行爬行的问题,优化了地形适应能力。
技术研发人员:蓝云昊,杨壬达,廖健儒
受保护的技术使用者:蓝云昊
技术研发日:20230421
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!