底盘及机器人的制作方法
本申请实施例涉及智能机器人,特别是涉及一种底盘及机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、在如今的智慧园区、智慧酒店、工业园等建筑及建筑集群中,常需要使用到机器人进行物品运输、园区巡逻、巡检等日常工作。这类机器人在行进的过程中常需要在各种地形之间行进。目前,机器人底盘均为固定设置,重心固定,如此难以满足机器人在复杂地形行进的需求。
技术实现思路
1、本申请实施例提供一种底盘及机器人系统,旨在于增强机器人对复杂地形行进的适应能力。
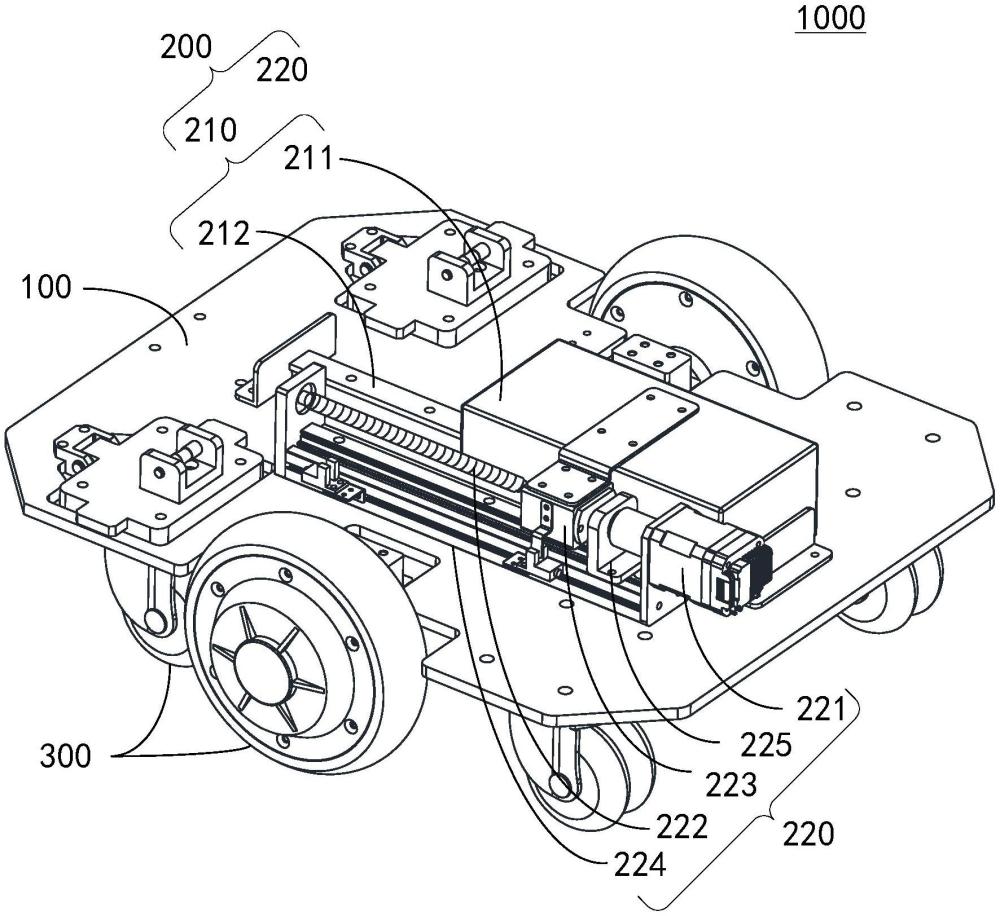
2、为解决上述技术问题,本申请采用的一个技术方案是:提供一种底盘。所述底盘包括安装板和安装于所述安装板的重心调节机构。所述重心调节机构包括配重组件和驱动机构。所述配重组件包括配重块和配重轨道,所述配重轨道安装于所述安装板,所述配重块可移动安装于所述配重轨道,并可沿所述配重轨道来回移动。所述驱动机构,安装于所述安装板,所述驱动机构与所述配重块驱动连接,所述驱动机构用于驱动所述配重块滑动,以改变所述配重块相对于所述安装板的位置。
3、可选的,所述配重块凹设有安装槽。所述配重组件还包括滑块,所述滑块固定安装于所述安装槽内,所述滑块与所述配重轨道滑动配合。
4、可选的,所述滑块是滚珠滑块,所述滚珠滑块包括滑块本体和滚珠,所述滑块本体设置有滑动槽,所述滑动槽贯穿所述滑块本体,所述滚珠设置于所述滑块本体朝向所述配重轨道的表面,并且部分暴露于所述滑动槽。
5、可选的,所述配重块朝向于所述安装板的一侧与所述安装板抵接。
6、可选的,所述驱动机构包括电机、丝杆、连接块和固定支架。所述固定支架固定安装于所述安装板;所述丝杆和所述连接块螺纹连接以形成丝杆结构,其中,所述丝杆的两端分别安装于所述固定支架;所述电机的输出端传动连接于所述丝杆,用于驱动所述丝杆;所述连接块与所述配重块固定连接。
7、可选的,所述连接块包括连接块本体和连接件,所述连接块本体与所述丝杆螺纹连接以形成丝杆结构,所述连接件的一端连接于所述连接块本体,另一端连接于所述配重块。所述连接件设置有第一固定部、连接部和第二固定部,所述第一固定部设置于所述连接块,所述第二固定部与所述配重块固定,所述连接部弯折设置,所述连接部的两端分别连接所述第一固定部和第二固定部。
8、可选的,所述驱动机构还包括轴承支架,所述轴承支架设置于所述固定支架的两端之间。所述驱动机构还包括联轴器,所述联轴器安装于所述固定支架靠近所述电机的一侧,所述联轴器的一端与所述电机连接,所述联轴器的另一端与所述丝杆连接。
9、可选的,所述底盘还包括光电挡片和至少两个光电开关,所述光电挡片凸出设置于所述连接块,所述光电开关安装于所述固定支架,所述光电挡片和光电开关设置于所述丝杆的同侧。
10、可选的,所述底盘还包括有至少一个限位挡片,所述限位挡片安装于所述安装板,所述限位挡片设置于所述配重轨道的其中一端,所述限位挡片用于防止所述配重块脱出所述配重轨道。
11、为解决上述技术问题,本申请还提供了一种机器人,包括上述底盘。
12、本申请实施例的有益效果是:通过上述结构,机器人可通过所述驱动机构驱动所述配重块沿所述配重轨道移动,从而改变所述配重块相对于所述安装板的位置,以改变机器人重心,以增强机器人对复杂地形行进的适应能力。
技术特征:
1.一种底盘,其特征在于,包括安装板和安装于所述安装板的重心调节机构;
2.根据权利要求1所述的底盘,其特征在于,所述配重块凹设有安装槽;所述配重组件还包括滑块,所述滑块固定安装于所述安装槽内,所述滑块与所述配重轨道滑动配合。
3.根据权利要求2所述的底盘,其特征在于,所述滑块是滚珠滑块,所述滚珠滑块包括滑块本体和滚珠,所述滑块本体设置有滑动槽,所述滑动槽贯穿所述滑块本体,所述滚珠设置于所述滑块本体朝向所述滑动槽的表面,并且部分暴露于所述滑动槽。
4.根据权利要求1所述的底盘,其特征在于,所述配重块朝向于所述安装板的一侧与所述安装板抵接。
5.根据权利要求1所述的底盘,其特征在于,所述驱动机构包括电机、丝杆、连接块和固定支架;
6.根据权利要求5所述的底盘,其特征在于,所述连接块包括连接块本体和连接件,所述连接块本体与所述丝杆螺纹连接以形成丝杆结构,所述连接件的一端连接于所述连接块本体,另一端连接于所述配重块;所述连接件设置有第一固定部、连接部和第二固定部,所述第一固定部设置于所述连接块,所述第二固定部与所述配重块固定,所述连接部弯折设置,所述连接部的两端分别连接所述第一固定部和第二固定部。
7.根据权利要求5所述的底盘,其特征在于,所述驱动机构还包括轴承支架,所述轴承支架设置于所述固定支架的两端之间;
8.根据权利要求5所述的底盘,其特征在于,所述底盘还包括光电挡片和至少两个光电开关,所述光电挡片凸出设置于所述连接块,所述光电开关安装于所述固定支架,所述光电挡片和光电开关设置于所述丝杆的同侧。
9.根据权利要求1所述的底盘,其特征在于,所述底盘还包括有至少一个限位挡片,所述限位挡片安装于所述安装板,所述限位挡片设置于所述配重轨道的其中一端,所述限位挡片用于防止所述配重块脱出所述配重轨道。
10.一种机器人,其特征在于,包括如权利要求1-9任意一项权利要求所述的底盘。
技术总结
本申请实施例涉及智能机器人技术领域,特别是涉及一种底盘及机器人。所述底盘包括安装板和安装于所述安装板的重心调节机构。所述重心调节机构包括配重组件和驱动机构。配重组件包括配重块和配重轨道,所述配重轨道安装于所述安装板,所述配重块可移动安装于所述配重轨道,并可沿所述配重轨道来回移动。驱动机构安装于所述安装板,所述驱动机构与所述配重块驱动连接,所述驱动机构用于驱动所述配重块滑动,以改变所述配重块相对于所述安装板的位置。通过上述结构,在机器人遇到上下坡时,通过所述驱动机构驱动所述配重块沿所述配重轨道移动,从而改变所述配重块相对于所述安装板的位置,以改变机器人重心。
技术研发人员:罗沛,吴强
受保护的技术使用者:深圳优地科技有限公司
技术研发日:20230412
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!