一种大扭矩式全地形四履行走底盘的制作方法
本技术属于农业设备,尤其涉及一种大扭矩式全地形四履行走底盘。
背景技术:
1、现有的农业机械行走轮主要分为三种方式:一、轮胎式行走装置,该类行走装置仅能在平地或大面积平坦地面上操作和使用,具有一定的使用局限性,并不适用于松软、泥泞或者斜坡地区进行作业;二、履带式行进装置,该类装置的履带轮与地面接触面积较大,不易打滑,具有良好的稳定性,可在松软、泥泞的地区进行农业作业,但履带轮在行走时转向性较差,且在不平或坡度较大的路面上行走时,常常会因为车身重心偏移而发生车翻;三、齿轮叶片行走轮,该装置在轮圈外侧周围布置了多个齿形叶片。在公路路面上行走时,因为轮圈本身的机械结构限制,轮圈容易变形弯曲,齿形叶片容易损坏,减少了装置的使用寿命。因此,底盘的行走局限性以及可靠性成为了越来越严重的问题。
2、针对这一问题,公开号为cn111361645b的专利公开了一种全地形四履带底盘和农业机械,其工作时,四组平履带行进机构呈矩形分布,每组平履带行走机构均通过固定结构安装在机架(1)上。采取此种方法,可使得整机重心趋于机体几何中心部位,使得机体在坡度大的地形上可以更加的平稳,有效地防止机体发生重心偏移,能更好地进行作业。
3、该技术方案所提出的一种全地形四履带底盘和农业机械可有效提高机体的稳定性,进而减少翻倒现象,提高全地形四履带底盘的使用可靠性。但是该装置在转向过程中仅靠后两组平履带行走机构进行转向,在不平坦的地面上,如若后轮转向被限制,可能存在无法转向的情况,同时后轮转向驱动容易导致转向过度。
技术实现思路
1、本实用新型的目的在于克服现有技术中的不足,解决或至少减轻现有的履带底盘行进时不易控制转向的问题,提供一种大扭矩式全地形四履行走底盘。
2、本实用新型是通过以下技术方案实现的:
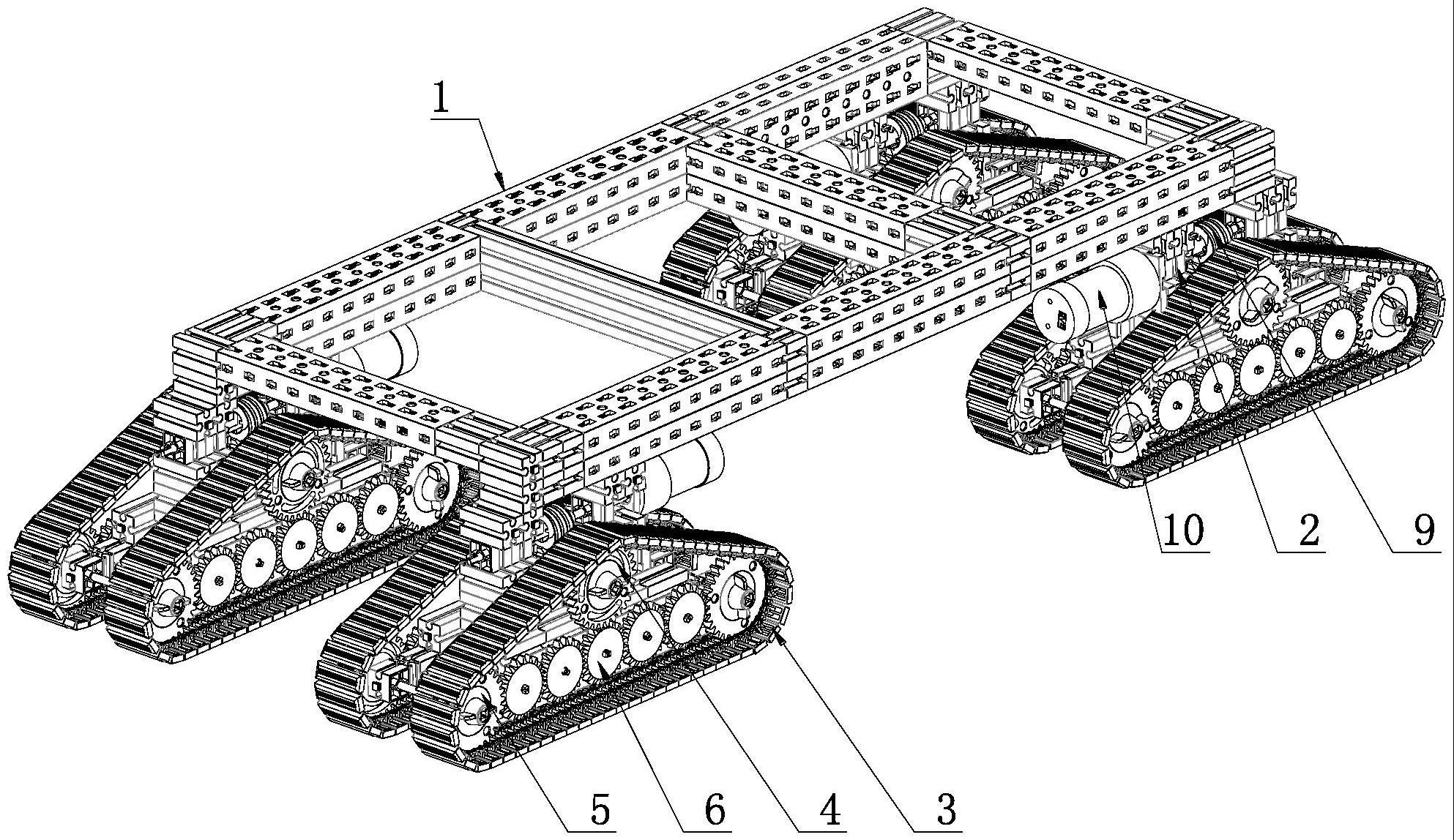
3、一种大扭矩式全地形四履行走底盘,包括机架和履带行进组件,四组所述履带行进组件分别设置于机架的四角处;
4、所述履带行进组件包括行进架和行进部件,两组所述行进部件分别位于行进架两侧,所述行进部件包括行进履带、主动齿轮、承载齿轮和从动齿轮,所述主动齿轮、承载齿轮和从动齿轮均转动连接至行进架,主动齿轮位于行进架中部,两个所述承载齿轮分别位于主动齿轮前后两侧,承载齿轮的高度位置低于主动齿轮的高度位置,多个所述从动齿轮横向阵列设置,任意相邻的两个从动齿轮之间相互啮合,位于两端的两个从动齿轮分别与两个承载齿轮相互啮合,位于中部的其中一个从动齿轮与主动齿轮相互啮合,所述行进履带呈环形,行进履带传动缠绕于主动齿轮和两个承载齿轮。
5、为了进一步实现本实用新型,可优先选用以下技术方案:
6、优选的,所述履带行进组件还包括驱动部件,所述驱动部件包括驱动轴、驱动蜗轮、驱动蜗杆和驱动电机,所述驱动轴两端分别与两个行进部件的主动齿轮同轴固定连接,所述驱动蜗轮固定套合于驱动轴中部,所述驱动蜗杆转动连接至行进架,所述驱动电机的输出轴与驱动蜗杆传动连接。
7、优选的,所述从动齿轮的数量为奇数,所述主动齿轮与位于中心处的从动齿轮相互啮合。
8、优选的,所述从动齿轮的外径值小于承载齿轮的外径值。
9、优选的,所述履带行进组件与机架之间设置有调整架,所述调整架呈丄字形,调整架的竖直段上端与机架铰接,所述行进架固定连接于调整架的水平段下侧。
10、优选的,所述调整架的水平段长度方向与多个从动齿轮的阵列方向平行。
11、优选的,两个所述承载齿轮对称设置于所述调整架的竖直段前后两侧。
12、优选的,所述调整架的水平段两端与机架之间均设置有压簧,所述压簧竖直设置,压簧的上下两端分别与机架和调整架固定连接。
13、通过上述技术方案,本实用新型的有益效果是:
14、本实用新型可平稳运行且可自由转向。同时为了使机体在多种复杂的环境下,可以转向自如,采用四个独立电机分别带动履带行进组件。为了使机体行进更加稳定,一组履带行进组件装备两条行进履带。
15、本实用新型采用履带行进机构,使行走过程更加平稳,行进履带与地面接触面大,具有足够大的摩擦,不易打滑。采用四个独立电机带动行进履带行走,提供足够的动力以适应于多种复杂的环境。履带具有不怕扎、割等机械损伤的优势,具有防水特性,同时满足在坑道及复杂环境工作的要求,越野机动性好,爬坡、越沟等性能均优于轮式移动机构。多齿轮与履带啮合连接可以有效避免单个齿轮卡壳造成的动力中断。
技术特征:
1.一种大扭矩式全地形四履行走底盘,其特征在于,包括机架(1)和履带行进组件,四组所述履带行进组件分别设置于机架(1)的四角处;
2.根据权利要求1所述的一种大扭矩式全地形四履行走底盘,其特征在于,所述履带行进组件还包括驱动部件,所述驱动部件包括驱动轴(7)、驱动蜗轮(8)、驱动蜗杆(9)和驱动电机(10),所述驱动轴(7)两端分别与两个行进部件的主动齿轮(4)同轴固定连接,所述驱动蜗轮(8)固定套合于驱动轴(7)中部,所述驱动蜗杆(9)转动连接至行进架(2),所述驱动电机(10)的输出轴与驱动蜗杆(9)传动连接。
3.根据权利要求1所述的一种大扭矩式全地形四履行走底盘,其特征在于,所述从动齿轮(6)的数量为奇数,所述主动齿轮(4)与位于中心处的从动齿轮(6)相互啮合。
4.根据权利要求1所述的一种大扭矩式全地形四履行走底盘,其特征在于,所述从动齿轮(6)的外径值小于承载齿轮(5)的外径值。
5.根据权利要求1所述的一种大扭矩式全地形四履行走底盘,其特征在于,所述履带行进组件与机架(1)之间设置有调整架(11),所述调整架(11)呈丄字形,调整架(11)的竖直段上端与机架(1)铰接,所述行进架(2)固定连接于调整架(11)的水平段下侧。
6.根据权利要求5所述的一种大扭矩式全地形四履行走底盘,其特征在于,所述调整架(11)的水平段长度方向与多个从动齿轮(6)的阵列方向平行。
7.根据权利要求5所述的一种大扭矩式全地形四履行走底盘,其特征在于,两个所述承载齿轮(5)对称设置于所述调整架(11)的竖直段前后两侧。
8.根据权利要求5所述的一种大扭矩式全地形四履行走底盘,其特征在于,所述调整架(11)的水平段两端与机架(1)之间均设置有压簧,所述压簧竖直设置,压簧的上下两端分别与机架(1)和调整架(11)固定连接。
技术总结
本技术涉及一种大扭矩式全地形四履行走底盘,包括机架和履带行进组件,四组所述履带行进组件分别设置于机架的四角处,所述履带行进组件包括行进架和行进部件,两组所述行进部件分别位于行进架两侧,所述行进部件包括行进履带、主动齿轮、承载齿轮和从动齿轮,主动齿轮位于行进架中部,两个所述承载齿轮分别位于主动齿轮前后两侧,任意相邻的两个从动齿轮之间相互啮合,位于两端的两个从动齿轮分别与两个承载齿轮相互啮合,位于中部的其中一个从动齿轮与主动齿轮相互啮合,行进履带传动缠绕于主动齿轮和两个承载齿轮。本技术的目的在于解决或至少减轻现有的履带底盘行进时不易控制转向的问题,提供一种大扭矩式全地形四履行走底盘。
技术研发人员:党志忠,韩广,潘科润,张宪辉,张雨彤,冯长龙,付家兵
受保护的技术使用者:冯长龙
技术研发日:20230426
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!