一种气动辅助行走机构的制作方法
本技术涉及一种气动辅助行走机构,属于自走式气垫搬运车。
背景技术:
1、气动助力机械手作为目前多晶硅行业还原炉车间进行移载硅棒的专用设备,已被国内外多晶硅生产企业所广泛使用。主要依靠还原车间行车或者人工移动将该设备水平移动布置到每一个待拆棒的还原炉前进行拆棒作业。而利用行车移动缺点是:1、一个车间最多配备2台行车,如果遇到维修或者起吊还原炉钟罩时,就没有多余的设备移动机械手;2、移动机械手一般在还原炉钟罩打开后,而行车移动过程中产生灰尘或掉落物对还原多晶硅棒造成污染,无形中造成产品品质下降;3、人工移动的话,需要2到3个人推动设备,工人劳动强度增加。
技术实现思路
1、针对上述现有技术存在的问题,本实用新型提供一种气动辅助行走机构,通过采用车间内存在的气动动力气源,动力来源简单可靠,并且气动马达动作平稳满足搬运启动助力机械手搬运要求,并且通过将延长支撑臂收纳这承重平台侧壁上,便于缩小机构整体尺寸,便于移动。
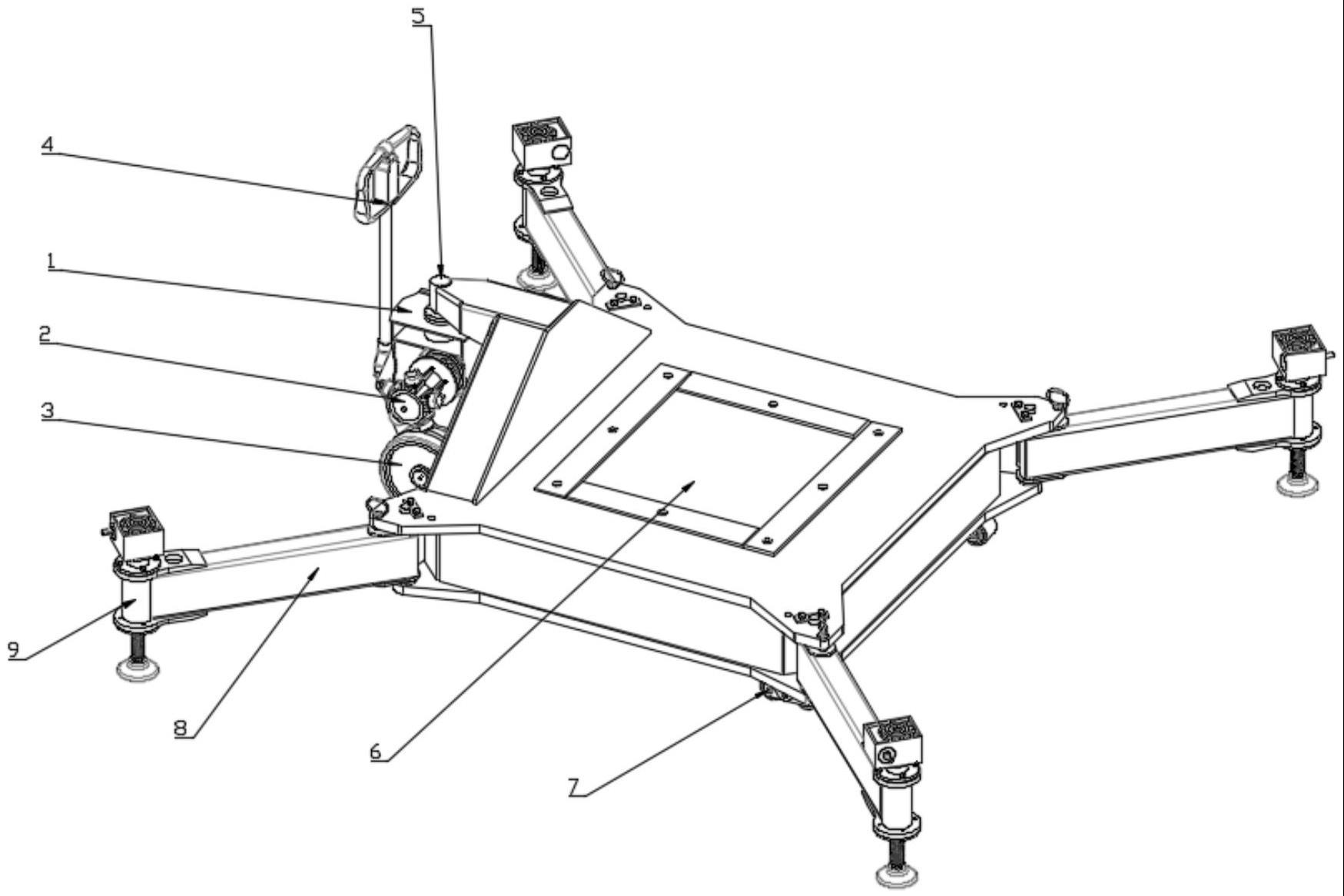
2、为了实现上述目的,一种气动辅助行走机构,包括安装支架、设置在安装支架内的气动马达、设置在安装支架底部的主动轮、设置在安装支架上的操作扶手与转动轴、与转动轴连接的承重平台以及设置在承重平台下的辅助轮,所述安装支架的一侧设置有连接气动马达输出轴与主动轮的传动机构。
3、优选地,所述承重平台四角设置分别转动设置有延长支撑臂,所述延长支撑臂远离承重平台的一端设置有可调节支腿。
4、优选地,所述可调节支腿的上设置有用于调节伸缩速度的减速机构。
5、优选地,所述主动轮为铁芯聚氨酯轮。
6、优选地,所述气动马达的控制开关设置在操作扶手上。
7、优选地,所述延长支撑臂中远离安装支架的两个延长支撑臂具有伸缩结构,其缩短后长度等于承重平台侧壁长的一半,所述承重平台的侧壁上设置有能够通过磁吸固定延长支撑臂的磁吸块。
8、与现有技术对比,本实用新型通过采用车间内存在的气动动力气源,动力来源简单可靠,并且气动马达动作平稳满足搬运启动助力机械手搬运要求,并且通过将延长支撑臂收纳这承重平台侧壁上,便于缩小机构整体尺寸,便于移动。
技术特征:
1.一种气动辅助行走机构,其特征在于,包括安装支架(1)、设置在安装支架(1)内的气动马达(2)、设置在安装支架(1)底部的主动轮(3)、设置在安装支架(1)上的操作扶手(4)与转动轴(5)、与转动轴(5)连接的承重平台(6)以及设置在承重平台(6)下的辅助轮(7),所述安装支架(1)的一侧设置有连接气动马达(2)输出轴与主动轮(3)的传动机构。
2.根据权利要求1所述的一种气动辅助行走机构,其特征在于,所述承重平台(6)四角设置分别转动设置有延长支撑臂(8),所述延长支撑臂(8)远离承重平台(6)的一端设置有可调节支腿(9)。
3.根据权利要求2所述的一种气动辅助行走机构,其特征在于,所述可调节支腿(9)的上设置有用于调节伸缩速度的减速机构。
4.根据权利要求1所述的一种气动辅助行走机构,其特征在于,所述主动轮(3)为铁芯聚氨酯轮。
5.根据权利要求1所述的一种气动辅助行走机构,其特征在于,所述气动马达(2)的控制开关设置在操作扶手(4)上。
6.根据权利要求2所述的一种气动辅助行走机构,其特征在于,所述延长支撑臂(8)中远离安装支架的两个延长支撑臂(8)具有伸缩结构,其缩短后长度等于承重平台(6)侧壁长的一半,所述承重平台(6)的侧壁上设置有能够通过磁吸固定延长支撑臂(8)的磁吸块。
技术总结
本技术公开了一种气动辅助行走机构,包括安装支架、设置在安装支架内的气动马达、设置在安装支架底部的主动轮、设置在安装支架上的操作扶手与转动轴、与转动轴连接的承重平台以及设置在承重平台下的辅助轮,所述安装支架的一侧设置有连接气动马达输出轴与主动轮的传动机构。本技术通过采用车间内存在的气动动力气源,动力来源简单可靠,并且气动马达动作平稳满足搬运启动助力机械手搬运要求,并且通过将延长支撑臂收纳这承重平台侧壁上,便于缩小机构整体尺寸,便于移动。
技术研发人员:徐晨,张鹏程,朱慧媛
受保护的技术使用者:徐州川一工程机械有限公司
技术研发日:20230428
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!