一种自动驾驶机器人转向控制机构的制作方法
本技术属于自动驾驶辅助测试系统,特别是用于自动驾驶功能测试的机器人转向控制机构。
背景技术:
1、在进行adas智能驾驶辅助功能场地测试时,需匹配转向机器人实现转向操作,从而完成试验测试。
2、目前的自动驾驶机器人转向控制主要有两种方式,其一是实心电机+齿轮箱实现的方式,其可实现高转速及高扭矩,但对方向盘安全气囊造成遮挡,安全系数较低;其二是通过偏置电机+中空的大齿轮传递,其可消除对安全气囊的影响,但速度较低。
技术实现思路
1、因此,针对现有状况,本实用新型提供一种自动驾驶机器人转向控制机构,用于自动驾驶转向功能测试,其通过在方向盘上直接加装一转接法兰,并通过电机直驱的方式,实现方向盘的转向,不遮挡安全气囊,且提供的转速高,扭矩大。
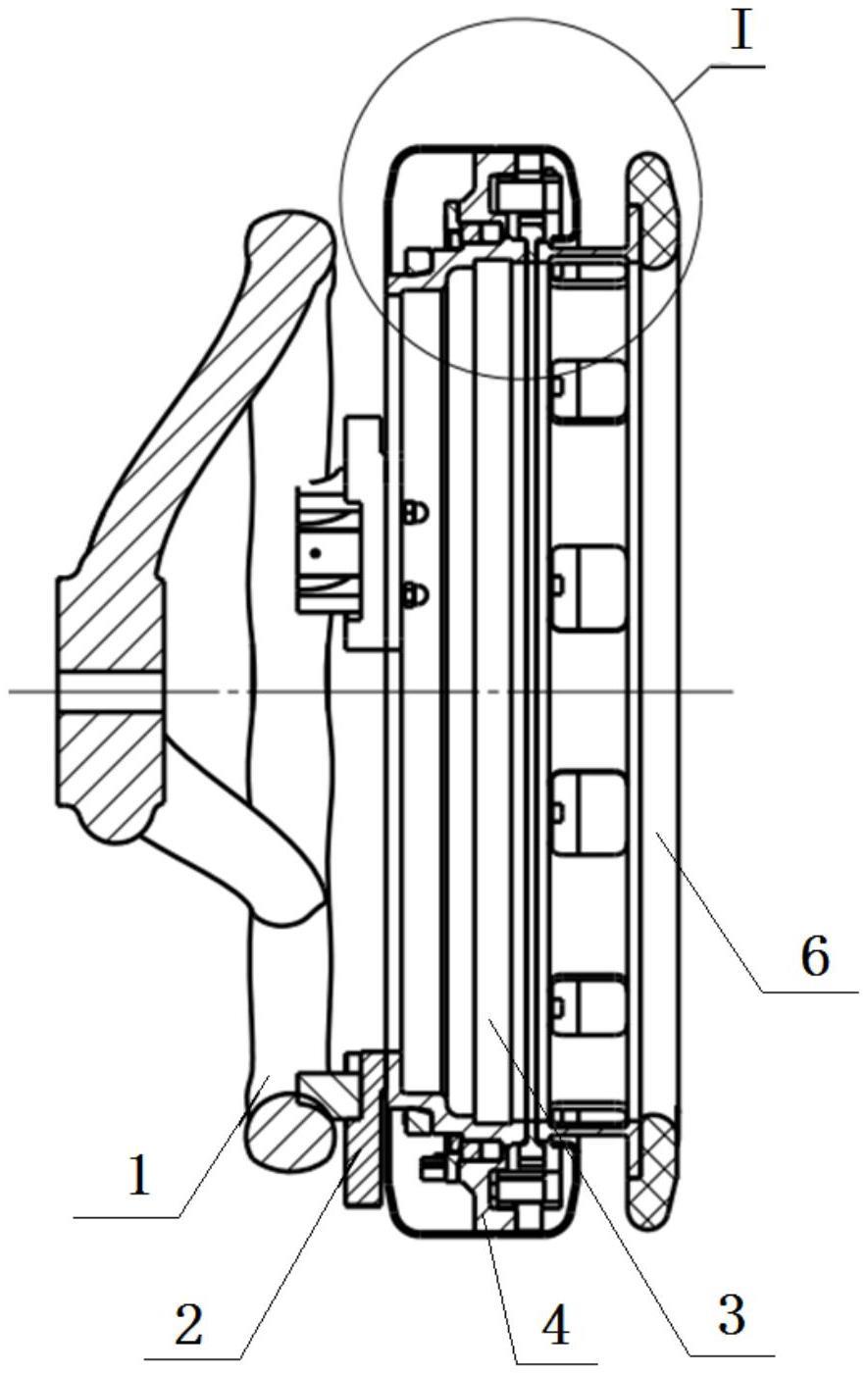
2、本实用新型的具体方案是:一种自动驾驶机器人转向控制机构,其借助于车辆本身的方向盘而安装,包括有:
3、方向盘夹具,安装于所述方向盘的盘缘上;
4、转接法兰,连接于所述方向盘夹具上;
5、电机,设置于所述转接法兰的外围,驱动连接所述转接法兰。
6、进一步地,所述转接法兰、电机与方向盘为同轴心安装。
7、进一步地,所述方向盘夹具设置有3个,沿所述方向盘周向均布,与所述转接法兰端面连接。
8、进一步地,所述转接法兰通过所述方向盘夹具固定连接于所述方向盘的外侧。
9、进一步地,所述电机,包括有机座,所述机座固定于车身上,所述机座内侧设置有定子轴承座,所述定子轴承座内侧设置有轴承,所述转接法兰通过轴承支撑在定子轴承座中;所述电机,还包括有定子和转子,所述定子固定在定子轴承座中,所述转子嵌入式套设在转接法兰外围。
10、进一步地,在所述转接法兰上装有磁栅。
11、进一步地,在所述转接法兰外侧同轴连接一工装方向盘。
12、本实用新型采用上述结构的优点在于:
13、1.为电机直驱方式,能够满足大扭矩、高转速需求;
14、2.只需中间设置一转接法兰就可外接电机,结构简单,且不妨碍气囊。
15、3.还可在转接法兰外侧外接一能手动操作的工装方向盘,除了电机驱动外还可临时手动操作。
16、4.整体结构都为同轴安装,符合转动机构设计原理。
技术特征:
1.一种自动驾驶机器人转向控制机构,其特征在于:借助于车辆本身的方向盘(1)而安装,包括有:
2.根据权利要求1所述的自动驾驶机器人转向控制机构,其特征在于:所述转接法兰(3)、电机(4)与方向盘(1)同轴心安装。
3.根据权利要求1所述的自动驾驶机器人转向控制机构,其特征在于:所述方向盘夹具(2)设置有3个,沿所述方向盘(1)周向均布,与所述转接法兰(3)端面连接。
4.根据权利要求1所述的自动驾驶机器人转向控制机构,其特征在于:所述转接法兰(3)通过所述方向盘夹具(2)固定连接于所述方向盘(1)的外侧。
5.根据权利要求1所述的自动驾驶机器人转向控制机构,其特征在于:所述电机(4),包括有机座(41),所述机座(41)固定于车身上,所述机座(41)内侧设置有定子轴承座(42),所述定子轴承座(42)内侧设置有轴承(43),所述转接法兰(3)通过轴承(43)支撑在定子轴承座(42)中;
6.根据权利要求1所述的自动驾驶机器人转向控制机构,其特征在于:在所述转接法兰(3)上装有磁栅(5)。
7.根据权利要求1所述的自动驾驶机器人转向控制机构,其特征在于:在所述转接法兰(3)外侧同轴连接一工装方向盘(6)。
技术总结
本技术公开一种自动驾驶机器人转向控制机构,包括有方向盘夹具,安装于车辆本身的方向盘上;转接法兰,连接于方向盘夹具上;电机,设置于转接法兰外围,驱动连接所述转接法兰;所述转接法兰、电机、方向盘同轴心安装。本技术通过电机直接带动转接法兰旋转,为车辆方向盘提供转向力,满足大扭矩、高转速的需求,且都为同轴安装,结构简单,不妨碍气囊。
技术研发人员:吕林泉,邱红友,张强,潘伟,李艺,王舰
受保护的技术使用者:中汽院智能网联科技有限公司
技术研发日:20230505
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!