一种全向底盘结构的制作方法
本技术涉及服务机器人配件,具体来说,涉及一种全向底盘结构。
背景技术:
1、随着科学技术的不断发展,服务机器人作为一种智能化机械设备越来越受到人们的关注,并已广泛应用到维修、运输、清洗、救援、监护、餐饮等各个领域。就其结构而言,它主要是由运动模块,控制模块,检测装置和主体等构成,而其中运动模块中的机器人底盘作为实现机器人移动的关键机构更是人们研究的重点。
2、现有技术中,常见的机器人底盘按驱动方式可分为轮式、履带式、腿式和跳跃式等,相比之下,轮式以其构造简单,易于控制,承载能力大,运动灵活等诸多优点应用最多,申请号为201621477913.3公开了一种全向底盘结构及室内服务机器人,它包括底座、驱动装置、万向轮、所述的驱动装置包括撑板和安装在所述撑板上的两组驱动电机、两组驱动轮和两组编码器,所述两组驱动电机、两组驱动轮和两组编码器分别各自成镜像对称设置;所述多个万向轮固定设置在底座下,并沿底座下部边缘呈放射状均匀分布,底座和驱动装置为前后连接;上述装置在进行对驱动装置检修时,需要将整体底盘翻转到上方进行检测维修,费时费力,只能够通过底盘对安装的服务机器人进行不同位置的移动行驶,服务机器人本身的旋转角度不能够随着底盘的移动方向进行调整,并且根据行驶路面的遮挡物进行调节全方位角度变化。
3、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本实用新型提出一种全向底盘结构,以克服现有相关技术所存在的上述技术问题。
2、为此,本实用新型采用的具体技术方案如下:
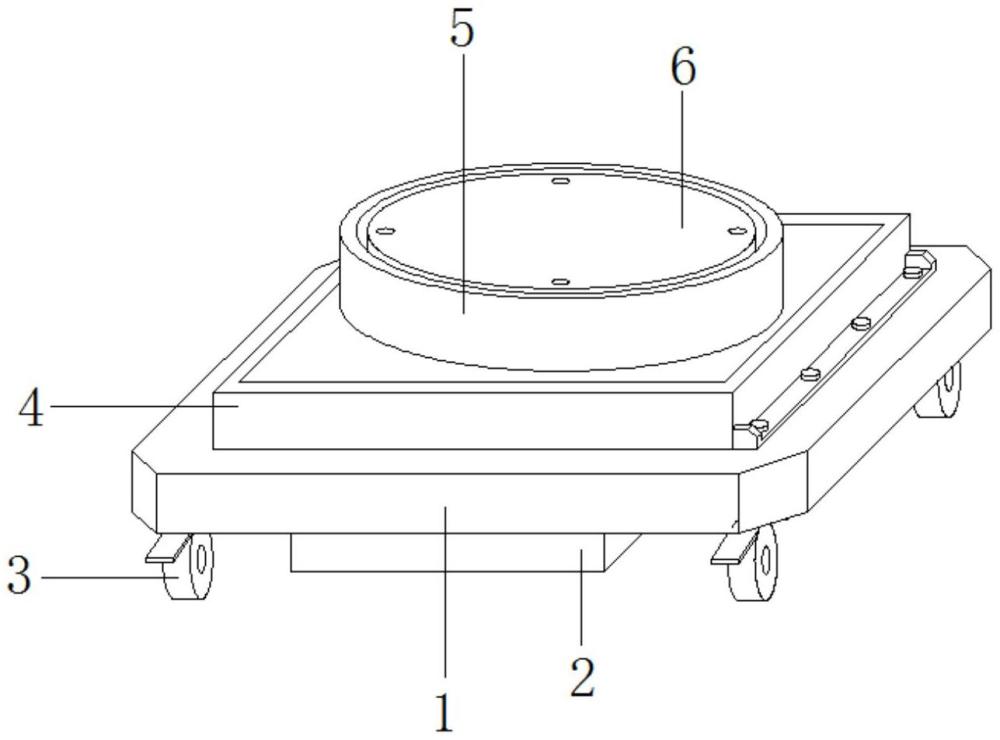
3、一种全向底盘结构,包括底盘、驱动装置主体、万向轮,所述底盘底侧中部与驱动装置主体固定连接,所述万向轮等距设置于底盘底部边缘处,所述底盘顶侧连接有安装座,所述安装座顶侧连接有支撑台,所述支撑台顶侧活动连接有安装盘。
4、作为优选,所述安装座左侧等距连接有铰链,所述铰链的固定端与底盘顶侧固定连接,所述安装座右侧底部固定连接有限位板,所述限位板上等距贯通设有定位螺栓,所述定位螺栓贯穿限位板底侧,且与安装座顶侧螺纹连接。
5、作为优选,所述支撑台顶侧挖设有圆形凹槽,所述安装盘设置于圆形凹槽内腔,且与支撑台顶侧平齐,所述安装盘底侧固定连接有三棱体,所述三棱体的锥头外侧设有第一铰轴,所述第一铰轴与圆形凹槽内壁底侧连接。
6、作为优选,所述圆形凹槽内壁底部右侧设有伸缩气缸,且内壁底部左侧对称设有液压杆,所述伸缩气缸底侧与活动端外侧、液压杆的固定端与活动端外侧分别设有第二铰轴,所述伸缩气缸底侧与活动端外侧分别通过第二铰轴与圆形凹槽内壁底侧、三棱体右侧连接,所述液压杆的固定端与活动端分别通过第二铰轴与圆形凹槽内壁底侧、三棱体左侧连接。
7、作为优选,所述安装座内腔左侧设有电机,所述安装座顶侧中央处通过轴承连接有轴杆,所述电机的输出轴外侧与轴杆外侧分别套设固定有齿轮,所述齿轮之间相互啮合。
8、作为优选,所述轴杆顶端与支撑台底侧固定连接,所述安装座内壁顶侧固定连接有单片机控制器,所述电机右侧设有蓄电池,所述蓄电池通过导线与单片机控制器、电机电性连接。
9、本实用新型的有益效果为:通过铰链使安装座向左上方进行翻开,可以直接对驱动装置主体内部进行检测维修,不需要将底盘翻转至正上方进行检修操作,省时省力,在液压杆的作用下,可以在对安装盘进行支撑的同时提高了角度调节的稳定性,在移动过程中对安装盘上装配的机器人进行仰俯调节,能够在行驶的过程中通过倾斜的方式对前方的遮挡物进行避让,使机器人的正面一直朝向底盘移动的方向,并且配合着伸缩气缸对安装盘进行仰俯角度调节,能够使安装盘上装配的机器人进行多方位进行仰俯角度变化,使底盘整体结构进行更加全面的方位调节,整体装置的灵活性大大提高。
技术特征:
1.一种全向底盘结构,包括底盘(1)、驱动装置主体(2)、万向轮(3),其特征在于,所述底盘(1)底侧中部与驱动装置主体(2)固定连接,所述万向轮(3)等距设置于底盘(1)底部边缘处,所述底盘(1)顶侧连接有安装座(4),所述安装座(4)顶侧连接有支撑台(5),所述支撑台(5)顶侧活动连接有安装盘(6),所述安装座(4)左侧等距连接有铰链(7),所述铰链(7)的固定端与底盘(1)顶侧固定连接,所述安装座(4)右侧底部固定连接有限位板(8),所述限位板(8)上等距贯通设有定位螺栓(9),所述定位螺栓(9)贯穿限位板(8)底侧,且与安装座(4)顶侧螺纹连接,所述支撑台(5)顶侧挖设有圆形凹槽(10),所述安装盘(6)设置于圆形凹槽(10)内腔,且与支撑台(5)顶侧平齐,所述安装盘(6)底侧固定连接有三棱体(11),所述三棱体(11)的锥头外侧设有第一铰轴(12),所述第一铰轴(12)与圆形凹槽(10)内壁底侧连接,所述圆形凹槽(10)内壁底部右侧设有伸缩气缸(13),且内壁底部左侧对称设有液压杆(14),所述伸缩气缸(13)底侧与活动端外侧、液压杆(14)的固定端与活动端外侧分别设有第二铰轴(15),所述伸缩气缸(13)底侧与活动端外侧分别通过第二铰轴(15)与圆形凹槽(10)内壁底侧、三棱体(11)右侧连接,所述液压杆(14)的固定端与活动端分别通过第二铰轴(15)与圆形凹槽(10)内壁底侧、三棱体(11)左侧连接。
2.根据权利要求1所述的一种全向底盘结构,其特征在于,所述安装座(4)内腔左侧设有电机(16),所述安装座(4)顶侧中央处通过轴承连接有轴杆(17),所述电机(16)的输出轴外侧与轴杆(17)外侧分别套设固定有齿轮(18),所述齿轮(18)之间相互啮合。
3.根据权利要求2所述的一种全向底盘结构,其特征在于,所述轴杆(17)顶端与支撑台(5)底侧固定连接,所述安装座(4)内壁顶侧固定连接有单片机控制器(19),所述电机(16)右侧设有蓄电池(20),所述蓄电池(20)通过导线与单片机控制器(19)、电机(16)电性连接。
技术总结
本技术公开了一种全向底盘结构,包括底盘、驱动装置主体、万向轮,所述底盘底侧中部与驱动装置主体固定连接,所述万向轮等距设置于底盘底部边缘处,所述底盘顶侧连接有安装座,所述安装座顶侧连接有支撑台,所述支撑台顶侧活动连接有安装盘,不需要将底盘翻转至正上方进行检修操作,省时省力,能够在行驶的过程中通过倾斜的方式对前方的遮挡物进行避让,使机器人的正面一直朝向底盘移动的方向,并且配合着伸缩气缸对安装盘进行仰俯角度调节,能够使安装盘上装配的机器人进行多方位进行仰俯角度变化,使底盘整体结构进行更加全面的方位调节,整体装置的灵活性大大提高。
技术研发人员:宋育刚
受保护的技术使用者:常熟穿山甲机器人有限公司
技术研发日:20230518
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!