一种电力机器人驱动机构的制作方法
本技术涉及机器人底盘,更具体地涉及一种电力机器人驱动机构。
背景技术:
1、现有的机器人尺寸较高,因此重心的位置较高,使用履带式底盘进行爬坡行走测试时,容易因重心过高的问题造成整机向后倾覆,适用性较差。
2、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种电力机器人驱动机构,以期达到更具有更加实用价值性的目的。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供了一种电力机器人驱动机构,以解决上述背景技术中存在的现有的机器人尺寸较高,因此重心的位置较高,使用履带式底盘进行爬坡行走测试时,容易因重心过高的问题造成整机向后倾覆,适用性较差的问题。
2、本实用新型提供如下技术方案:一种电力机器人驱动机构,包括底盘主体,所述底盘主体的前方和后方设置有多个履带轮,所述底盘主体的前方和后方设置有多个负重轮,所述履带轮和负重轮上皆活动安装有驱动履带,所述底盘主体的一侧设置有底盘支撑杆,所述底盘支撑杆的形状呈弧形。所述底盘支撑杆的顶端固定安装有连接杆,所述连接杆的末端与底盘主体的一侧相连,所述底盘支撑杆的末端通过转轴活动安装有两个底盘支撑轮,所述底盘支撑轮上皆设置有防滑凸块。上述结构在实际使用中,当底盘主体进行坡度较高的爬坡测试时,连接杆会持续为底盘主体的后方提供支撑力,同时由于底盘支撑杆的形状是弧形,因此可以承受更大的来自底盘主体的压力,底盘支撑杆的弹性性能也较好,且底盘支撑杆和连接杆、底盘主体三者构成三角形结构,支撑时更加稳定,底盘支撑轮上的多个防滑凸块也可以进一步使底盘支撑轮的防滑能力加强,在实际使用中有效解决现有的机器人尺寸较高,因此重心的位置较高,使用履带式底盘进行爬坡行走测试时,容易因重心过高的问题造成整机向后倾覆,适用性较差的问题。
3、进一步的,所述底盘支撑杆和连接杆上连接有安装板,所述安装板上设置有卡合凸块,所述底盘主体的一侧开设有卡合槽,所述卡合凸块和卡合槽皆相互卡合连接。通过上述结构的设置,在实际使用中可以快速将连接杆、底盘支撑杆和底盘支撑轮从底盘主体上拆下,当需要安装时仅需要将卡合凸块和底盘主体的卡合槽连接即可。
4、进一步的,所述负重轮上皆设置有减震悬挂,所述减震悬挂的顶端皆与底盘主体的底端固定连接。上述结构在实际使用中当底盘主体在携带机器人身体行进时遇到障碍物,可以有效越过障碍物,并为底盘主体提供较好的减震功能,同时加强了底盘主体的越野能力。
5、进一步的,所述底盘主体的两侧皆固定安装有两个照明灯,所述底盘主体的顶端设置有旋转台。上述结构在实际使用中,当把机器人上半身安装在旋转台上后,用户可以通过旋转旋转台来快速转动机器人的身体方向,同时照明灯可以为底盘主体提供照明。
6、进一步的,所述底盘主体的一侧活动设置有爬坡辅助器,所述爬坡辅助器的底端一侧活动设置有三个爬坡入土销,所述爬坡入土销的底端呈尖刺状。上述结构在实际使用中,当底盘主体爬上土质较软的土坡时,可以伸长爬坡辅助器,把爬坡辅助器从底盘主体的内部完全伸出,而后伸长爬坡入土销,使爬坡入土销完全刺入土壤中,而后底盘主体向前开动,并使爬坡辅助器自动回纳至底盘主体的内部,即可更加稳定牢固的爬上土质较软的坡道,这种爬坡方式可以进一步增强底盘主体在土坡上爬行的稳定性,防止底盘主体坠落。
7、本实用新型的技术效果和优点:
8、1.本实用新型通过设有底盘支撑杆、连接杆、底盘支撑轮,采用这种设计在实际使用中有效解决现有的机器人尺寸较高,因此重心的位置较高,使用履带式底盘进行爬坡行走测试时,容易因重心过高的问题造成整机向后倾覆,适用性较差的问题。
9、2.本实用新型通过设有减震悬挂,采用这种设计在实际使用中当底盘主体在携带机器人身体行进时遇到障碍物,可以有效越过障碍物,并为底盘主体提供较好的减震功能,同时加强了底盘主体的越野能力。
10、3.本实用新型通过设有爬坡辅助器、爬坡入土销,采用这种设计可更加稳定牢固的爬上土质较软的坡道,这种爬坡方式可以进一步增强底盘主体在土坡上爬行的稳定性,防止底盘主体坠落。
技术特征:
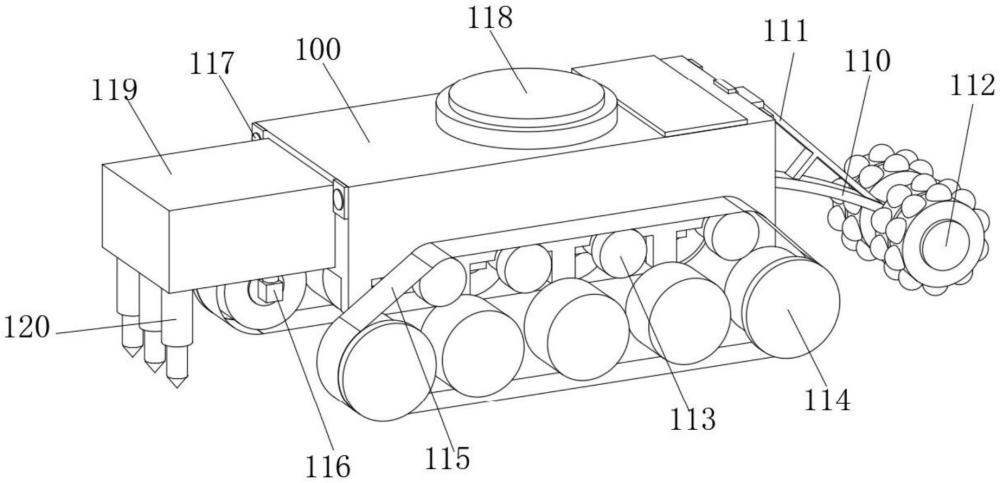
1.一种电力机器人驱动机构,包括底盘主体(100),其特征在于,所述底盘主体(100)的前方和后方设置有多个履带轮(113),所述底盘主体(100)的前方和后方设置有多个负重轮(114),所述履带轮(113)和负重轮(114)上皆活动安装有驱动履带(115),所述底盘主体(100)的一侧设置有底盘支撑杆(110),所述底盘支撑杆(110)的形状呈弧形,所述底盘支撑杆(110)的顶端固定安装有连接杆(111),所述连接杆(111)的末端与底盘主体(100)的一侧相连,所述底盘支撑杆(110)的末端通过转轴活动安装有两个底盘支撑轮(112),所述底盘支撑轮(112)上皆设置有防滑凸块。
2.根据权利要求1所述的一种电力机器人驱动机构,其特征在于:所述底盘支撑杆(110)和连接杆(111)上连接有安装板,所述安装板上设置有卡合凸块,所述底盘主体(100)的一侧开设有卡合槽,所述卡合凸块和卡合槽皆相互卡合连接。
3.根据权利要求1所述的一种电力机器人驱动机构,其特征在于:所述负重轮(114)上皆设置有减震悬挂(116),所述减震悬挂(116)的顶端皆与底盘主体(100)的底端固定连接。
4.根据权利要求1所述的一种电力机器人驱动机构,其特征在于:所述底盘主体(100)的两侧皆固定安装有两个照明灯(117),所述底盘主体(100)的顶端设置有旋转台(118)。
5.根据权利要求1所述的一种电力机器人驱动机构,其特征在于:所述底盘主体(100)的一侧活动设置有爬坡辅助器(119),所述爬坡辅助器(119)的底端一侧活动设置有三个爬坡入土销(120),所述爬坡入土销(120)的底端呈尖刺状。
技术总结
本技术涉及机器人底盘技术领域,且公开了一种电力机器人驱动机构,包括底盘主体,所述底盘主体的前方和后方设置有多个履带轮,所述底盘主体的前方和后方设置有多个负重轮,所述履带轮和负重轮上皆活动安装有驱动履带,所述底盘主体的一侧设置有底盘支撑杆,所述底盘支撑杆的形状呈弧形。所述底盘支撑杆的顶端固定安装有连接杆,所述连接杆的末端与底盘主体的一侧相连。本技术通过设有底盘支撑杆、连接杆、底盘支撑轮,采用这种设计在实际使用中有效解决现有的机器人尺寸较高,因此重心的位置较高,使用履带式底盘进行爬坡行走测试时,容易因重心过高的问题造成整机向后倾覆,适用性较差的问题。
技术研发人员:魏明珂
受保护的技术使用者:淄博封腾信息科技有限公司
技术研发日:20230523
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!