一种基于气动执行器的四足机器人系统
本技术属于机器人,尤其涉及一种基于气动执行器的四足机器人系统。
背景技术:
1、四足机器人为目前具有协同人类完成一些巡检、救援、探测等任务的机器人系统,目前国外boston dynamic(波士顿动力公司)的spot已经量产,国内的杭州宇树科技也成功研发多款四足机械狗且实现量产,其他的如小米公司开发的铁蛋四足机械狗。上述这些公司的产品基本采用刚性执行器-电机直接驱动,柔顺性较差。
2、中国专利cn114906249a、cn218400782u、cn218141843u,以及中国专利cn218141844u、cn217969708u、cn218431482u等,分别设计了不同类型的仿生四足机器人,但上述这些技术大部分局限于刚性元件作为框架进行搭建,柔顺性较差。
3、因此,有必要设计一款基于气动执行器的四足机器人系统。
技术实现思路
1、本实用新型实施例的目的在于提供一种基于气动执行器的四足机器人系统,旨在解决现有机器人存在的柔顺性较差的问题。
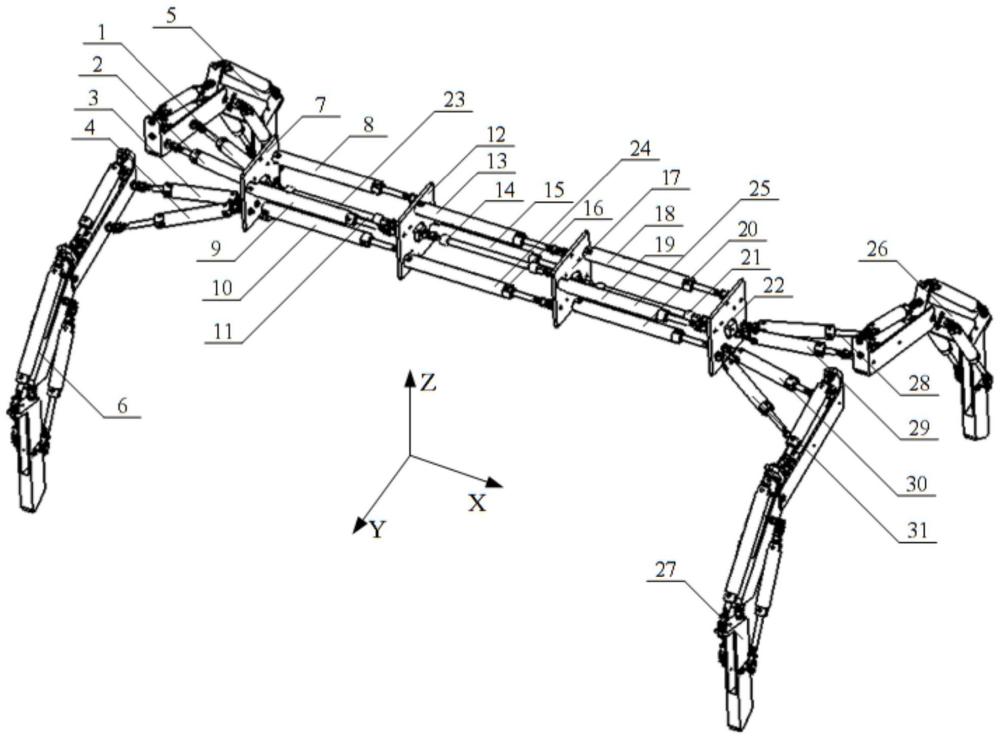
2、本实用新型实施例是这样实现的,一种基于气动执行器的四足机器人系统,所述基于气动执行器的四足机器人系统包括躯干主体和支腿,所述躯干主体的一端通过气动执行器设置有两个所述支腿,另一端也通过气动执行器设置有两个支腿;
3、所述躯干主体包括:腰关节、气动肌肉;两个以上所述腰关节通过所述气动肌肉连接,并且所述腰关节与所述气动肌肉的连接处可枢转;
4、相邻所述腰关节之间也设置有两个以上所述气动执行器,并且该两个以上的气动执行器围绕所述气动肌肉设置。
5、优选地,所述基于气动执行器的四足机器人系统还包括:动作监测控制单元,所述动作监测控制单元用于传输机器人的控制指令,并通过控制腰关节之间的所述气动执行器和/或所述气动肌肉动作,以控制所述躯干主体的弯折或伸缩,以及通过与所述支腿连接的气动执行器控制所述支腿的行走。
6、优选地,所述动作监测控制单元包括:气动阀、数据采集卡和上位机;
7、所述上位机通过所述数据采集卡连接有多个所述气动阀,多个所述气动阀分别与所述气动执行器连接;
8、所述上位机通过所述数据采集卡连接有传感器组件;
9、其中,所述传感器组件用于获取脑信号,并通过所述数据采集卡传输给所述上位机,所述上位机通过所述数据采集卡输出控制指令给所述气动阀,以通过所述气动阀控制所述气动执行器或所述气动肌肉的动作。
10、优选地,所述传感器组件包括:主动电极系统、脑电信号采集仪,所述主动电极系统、脑电信号采集仪、数据采集卡串联连接;所述主动电极系统用于采集用户的预控制信号,所述脑电信号采集仪用于提取该预控制信号中的脑信号,并传输给所述数据采集卡。
11、优选地,所述传感器组件还包括:气压传感器和位移传感器;
12、所述气压传感器用于监测所述气动执行器或气动肌肉的内部气压;
13、所述位移传感器用于监测所述支腿产生的位移。
14、优选地,相邻所述两个所述腰关节之间的气动执行器设置有三个,各段腰关节之间的单数个的气动执行器在气动肌肉的其中两侧交错分布。
15、优选地,所述支腿包括:股骨、腓骨、跗骨;
16、所述腓骨的两端分别与股骨、跗骨可转动连接,所述股骨远离所述腓骨的一端与所述气动执行器连接。
17、优选地,所述支腿的股骨、腓骨、跗骨均设置为镂空结构,所述支腿、腰关节的材料为铝合金。
18、优选地,所述气动执行器至少包括腰腿气缸、腰关节气缸,所述躯干主体与所述支腿之间设置腰腿气缸;
19、相邻所述腰关节之间设置腰关节气缸,且所述腰关节气缸围绕所述气动肌肉设置。
20、本实用新型实施例提供的一种基于气动执行器的四足机器人系统,相比现有技术,利用气动肌肉与气动执行器(具体可以是气缸)组合驱动腰关节,腰关节同时具备刚性与柔性的优点;利用多组气缸构成的气动执行器模式驱动支腿,即腿关节,腿关节具有极强的适应性;其中的躯干主体可以采用三段腰关节、气缸的多种组合模式,不但增大了腰关节绕x轴、y轴、z轴的运动范围,而且增强了腰关节的适应性。
技术特征:
1.一种基于气动执行器的四足机器人系统,所述基于气动执行器的四足机器人系统包括躯干主体和支腿,其特征在于,所述躯干主体的一端通过气动执行器设置有两个所述支腿,另一端也通过气动执行器设置有两个支腿;
2.根据权利要求1所述的基于气动执行器的四足机器人系统,其特征在于,所述基于气动执行器的四足机器人系统还包括:动作监测控制单元,所述动作监测控制单元用于传输机器人的控制指令,并通过控制腰关节之间的所述气动执行器和/或所述气动肌肉动作,以控制所述躯干主体的弯折或伸缩,以及通过与所述支腿连接的气动执行器控制所述支腿的行走。
3.根据权利要求2所述的基于气动执行器的四足机器人系统,其特征在于,所述动作监测控制单元包括:气动阀、数据采集卡和上位机;
4.根据权利要求3所述的基于气动执行器的四足机器人系统,其特征在于,所述传感器组件包括:主动电极系统、脑电信号采集仪,所述主动电极系统、脑电信号采集仪、数据采集卡串联连接;所述主动电极系统用于采集用户的预控制信号,所述脑电信号采集仪用于提取该预控制信号中的脑信号,并传输给所述数据采集卡。
5.根据权利要求4所述的基于气动执行器的四足机器人系统,其特征在于,所述传感器组件还包括:气压传感器和位移传感器;
6.根据权利要求1所述的基于气动执行器的四足机器人系统,其特征在于,相邻所述两个所述腰关节之间的气动执行器设置有三个,各段腰关节之间的单数个的气动执行器在气动肌肉的其中两侧交错分布。
7.根据权利要求1所述的基于气动执行器的四足机器人系统,其特征在于,所述支腿包括:股骨、腓骨、跗骨;
8.根据权利要求7所述的基于气动执行器的四足机器人系统,其特征在于,所述支腿的股骨、腓骨、跗骨均设置为镂空结构,所述支腿、腰关节的材料为铝合金。
9.根据权利要求1所述的基于气动执行器的四足机器人系统,其特征在于,所述气动执行器至少包括腰腿气缸、腰关节气缸,所述躯干主体与所述支腿之间设置腰腿气缸;
技术总结
本技术适用于机器人技术领域,提供了一种基于气动执行器的四足机器人系统,包括:躯干主体和支腿,所述躯干主体的一端通过气动执行器设置有两个所述支腿,另一端也通过气动执行器设置有两个支腿;所述躯干主体包括:腰关节、气动肌肉;两个以上所述腰关节通过所述气动肌肉连接,并且所述腰关节与所述气动肌肉的连接处可枢转;相邻所述腰关节之间也设置有两个以上所述气动执行器,并且该两个以上的气动执行器围绕所述气动肌肉设置;本技术基于气动执行器,具有结构紧凑、柔顺性好、多类型气动器发挥自身优势的特点。
技术研发人员:刘寒峭,姜飞龙,沈忠飞,王志坚,曹坚,潘浩然,朱海滨,徐宇游,皮鑫宜
受保护的技术使用者:嘉兴学院
技术研发日:20230706
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!