一种AGV机器人
本技术涉及一种机器人,具体为一种agv机器人,属于机器人。
背景技术:
1、随着机械自动化技术的发展,智能机器人技术已经在快递运输行业得到广泛的应用,快递运输行业的智能机械设备已得到快速发展,例如智能分拣机器人、快递自动售货机、快递智能柜、以及agv机器人等,在物流行业中,agv(自动导向车)机器人被广泛应用于仓库物流、快递配送等领域。
2、然而,传统的机器人并不是十分重视悬挂系统,滚轮都是固定安装的,在户外进行移动运输过程中,不方便灵活的进行上下坡工作,不同环境适应力差,容易造成打滑或歪倒,降低了运输效果。
技术实现思路
1、本实用新型的目的就在于为了解决上述问题而提供一种agv机器人,能够使用悬挂支撑,使移动更加灵活,在一定范围内四个轮子保证对地压力一致,防止翻车和接地能力不足及打滑的情况,极大的提高了机器人的通过性和爬坡性。
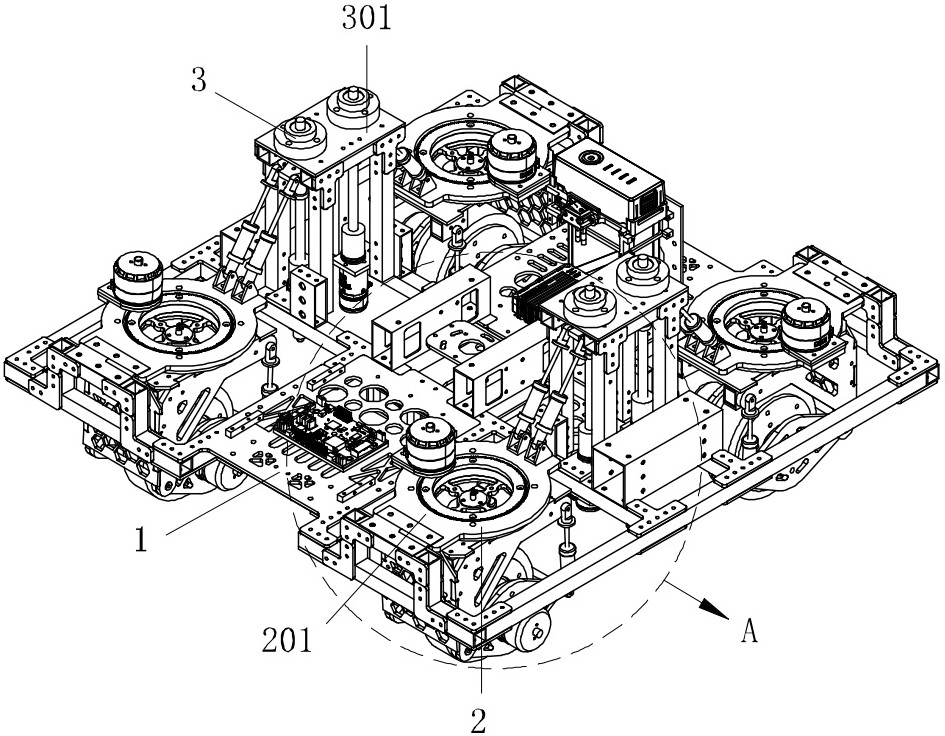
2、本实用新型通过以下技术方案来实现上述目的,一种agv机器人,包括机器人本体,所述机器人本体四角分别安装有移动机构,所述移动机构包括安装板,所述安装板底部安装有固定板,所述固定板上转动连接有滚轮,所述固定板一侧安装有第一电机,所述机器人本体上安装有调节机构,所述调节机构包括固定架,所述机器人本体顶部两端可拆卸连接有固定架,两个所述固定架内部分别通过安装座转动连接有两个丝杆,所述固定架底部安装有第三电机,所述第三电机与丝杆连接,两组所述丝杆上分别螺纹连接有丝母座,两组对称的所述丝母座上转动连接有两个第二减震器,所述减震器与安装板一端转动连接,所述安装板另一端通过铰链与机器人本体转动连接。
3、优选的,所述固定架通过连接轴与安装板转动连接,所述固定架为“凹”字形结构。
4、优选的,所述固定架一侧安装有挡板,所述挡板为镂空的长方形结构。
5、优选的,所述连接轴上安装有齿轮盘,所述安装板上安装有第二电机,所述第二电机输出轴通过齿轮与齿轮盘啮合。
6、优选的,所述固定板底部两侧分别转动连接有两个连接板,所述滚轮两端与连接板转动连接,所述第一电机与连接板一侧连接,两个所述连接板一端与固定板之间连接有第一减震器。
7、优选的,所述机器人本体上安装有多个加强筋,所述加强筋为内部中空的长方体结构。
8、本实用新型的有益效果是:通过安装板的安装,方便对固定板连接,从而实现对滚轮的安装,方便机器人本体能够在第一电机的作用下移动,通过固定架的安装,有利于对丝杆的安装,通过安装座使丝杆能够转动,在第三电机的作用下方便对丝杆驱动控制,从而实现对丝杆上的丝母座驱动,有利于实现丝母座控制第二减震器的移动,从而使安装板的角度进行调节,可以改变轮距,质心高度,可以使一定范围内四个轮子保证对地压力一致,防止翻车和接地能力不足,打滑的情况,极大的提高了机器人本体的通过性和爬坡性。
技术特征:
1.一种agv机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)四角分别安装有移动机构(2),所述移动机构(2)包括安装板(201),所述安装板(201)底部安装有固定板(205),所述固定板(205)上转动连接有滚轮(206),所述固定板(205)一侧安装有第一电机(203);
2.根据权利要求1所述的一种agv机器人,其特征在于:所述固定架(301)通过连接轴(209)与安装板(201)转动连接,所述固定架(301)为“凹”字形结构。
3.根据权利要求1所述的一种agv机器人,其特征在于:所述固定架(301)一侧安装有挡板(210),所述挡板(210)为镂空的长方形结构。
4.根据权利要求2所述的一种agv机器人,其特征在于:所述连接轴(209)上安装有齿轮盘(207),所述安装板(201)上安装有第二电机(208),所述第二电机(208)输出轴通过齿轮与齿轮盘(207)啮合。
5.根据权利要求1所述的一种agv机器人,其特征在于:所述固定板(205)底部两侧分别转动连接有两个连接板(204),所述滚轮(206)两端与连接板(204)转动连接,所述第一电机(203)与连接板(204)一侧连接,两个所述连接板(204)一端与固定板(205)之间连接有第一减震器(202)。
6.根据权利要求1所述的一种agv机器人,其特征在于:所述机器人本体(1)上安装有多个加强筋(305),所述加强筋(305)为内部中空的长方体结构。
技术总结
本技术涉及机器人技术领域,具体的说是一种AGV机器人,包括机器人本体,所述机器人本体四角分别安装有移动机构,所述移动机构包括安装板,所述固定板上转动连接有滚轮,所述机器人本体顶部两端可拆卸连接有固定架,两个所述固定架内部分别通过安装座转动连接有两个丝杆,所述固定架底部安装有第三电机,两组所述丝杆上分别螺纹连接有丝母座,两组对称的所述丝母座上转动连接有两个第二减震器,所述减震器与安装板一端转动连接,所述安装板另一端通过铰链与机器人本体转动连接;能够使用悬挂支撑,使移动更加灵活,在一定范围内四个轮子保证对地压力一致,防止翻车和接地能力不足及打滑的情况,极大的提高了机器人本体的通过性和爬坡性。
技术研发人员:黄超雷,周志垚佳,李雨涵,李恩
受保护的技术使用者:长安大学
技术研发日:20230718
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!