一种带有防倾倒结构的搬运机器人
本技术涉及搬运机器人,特别涉及一种带有防倾倒结构的搬运机器人。
背景技术:
1、agv智能搬运机器人是一种用于自动物流搬转运的机器人,agv即:automatedguidedvehicle简称agv,当前最常见的应用如:agv搬运机器人或agv小车,主要功用集中在自动物流搬转运,agv搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,rfid引导等;
2、随着工厂自动化、计算机集成制造系统技术逐步发展、以及柔性制造系统、自动化立体仓库的广泛应用,agv作为联系和调节离散型物流管理系统使其作业连续化的必要自动化搬运装卸手段,其应用范围和技术水平得到了迅猛的发展,市面上的agv搬运机器人主要还集中应用在制造业物料搬运上,agv在制造业应用中以其高效、准确、灵活地完成物料的搬运任务。并且可多台agv组成柔性的物流搬运系统,搬运路线可以随着生产工艺流程的调整而及时调整,使一条生产线上能够制造出十几种产品,大大提高了生产的柔性和企业的竞争力;
3、搬运机器人在搬运横向面积较大的物件时,搬运过程中转弯和启停过程中,易出现侧倾的问题,影响搬运的效率,为了解决上述技术问题,现提出一种带有防倾倒结构的搬运机器人。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种带有防倾倒结构的搬运机器人,解决了搬运机器人在搬运横向面积较大的物件时,搬运过程中转弯和启停过程中,易出现侧倾,影响搬运的效率技术问题。
3、(二)技术方案
4、为实现以上目的,本实用新型通过以下技术方案予以实现:
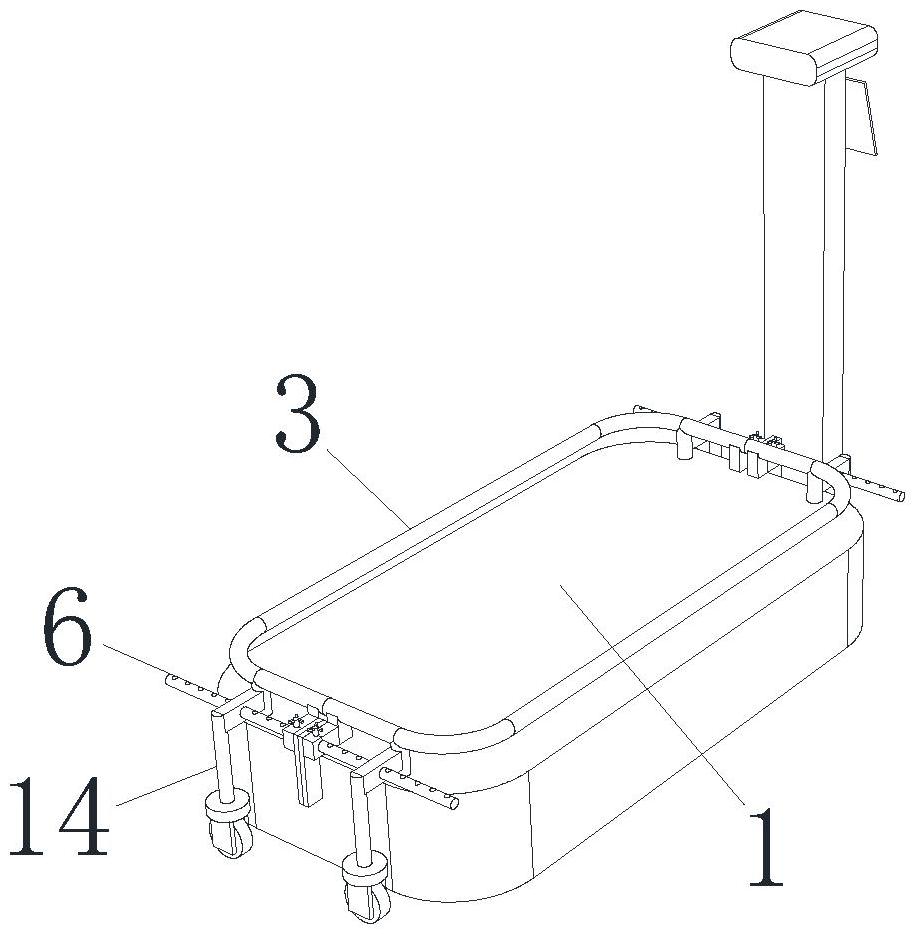
5、一种带有防倾倒结构的搬运机器人,包括用于引导搬运机器人移动的感应式引导部件和内置驱动结构的外壳组件,该一种带有防倾倒结构的搬运机器人还包括展开机构,所述展开机构包括两个固定架和两个支撑架,两个所述固定架分别固定连接在外壳组件前后外壁的中间部分,所述感应式引导部件与外壳组件的连接点位于外壳组件后表面的下端,每个支撑架的两端均固定连接有连接架和固定件,每个所述固定架上均固定连接有两个固定杆,每个所述固定杆上均贯穿有等距的定位槽,每个所述固定件的底部均固定连接有l型的支架,每个所述支架的底部均固定安装有万向轮,每个所述支架上均开设有圆形的杆槽,每个所述连接架上均贯穿有螺纹槽,每个所述螺纹槽内均螺纹套接有定位螺杆。
6、优选的:两个支撑架上的四个杆槽高度相同且均为横向槽。
7、优选的:每个螺纹槽均为竖向螺槽,所述定位螺杆下端与对应位置的定位槽活动卡接。
8、优选的:所述万向轮轮面最低点与外壳组件底部的滑轮最低点齐平。
9、优选的:位于前端的两个杆槽分别与位于前端的两个固定杆活动套接,固定杆与杆槽直径相同,位于后端的两个杆槽分别与位于后端的两个固定杆活动套接。
10、优选的:每个连接架上均同样开设有横向的杆槽,连接架上的杆槽与支架上的杆槽等高齐平。
11、(三)有益效果
12、1、通过定位螺杆与不同位置的定位槽活动卡接,来调节两个支撑架之间的间距,使得搬运机器人在搬运面积较大的物件时,可以调整支撑架位置来使得两个支撑架改变与物件底部的支撑点,使得运输横向面积较大的物件时可以提高稳定性和适用性,达到防倾倒的效果,万向轮的轮面与滑轮共同起到支撑滑动作用,支撑架滑离固定杆后可以便于拆装支撑架。
13、2、支撑架的高度高于外壳组件的上表面,在两个支撑架组成完整的环状结构后,利用定位螺杆固定住两个支撑架的位置,此时在运输较小的物件时,可以将两个连起来的支撑架作为围栏使用,避免较小的物件因移动过程中的惯性等因素滑离外壳组件,起到提高运输稳定性作用。
技术特征:
1.一种带有防倾倒结构的搬运机器人,包括用于引导搬运机器人移动的感应式引导部件(4)和内置驱动结构的外壳组件(1),其特征在于,该一种带有防倾倒结构的搬运机器人还包括展开机构,所述展开机构包括两个固定架(2)和两个支撑架(3);
2.如权利要求1所述的一种带有防倾倒结构的搬运机器人,其特征在于:两个支撑架(3)上的四个杆槽(10)高度相同且均为横向槽。
3.如权利要求1所述的一种带有防倾倒结构的搬运机器人,其特征在于:每个螺纹槽(12)均为竖向螺槽,所述定位螺杆(11)下端与对应位置的定位槽(6)活动卡接。
4.如权利要求1所述的一种带有防倾倒结构的搬运机器人,其特征在于:所述万向轮(9)轮面最低点与外壳组件(1)底部的滑轮最低点齐平。
5.如权利要求1所述的一种带有防倾倒结构的搬运机器人,其特征在于:位于前端的两个杆槽(10)分别与位于前端的两个固定杆(5)活动套接,固定杆(5)与杆槽(10)直径相同,位于后端的两个杆槽(10)分别与位于后端的两个固定杆(5)活动套接。
6.如权利要求1所述的一种带有防倾倒结构的搬运机器人,其特征在于:每个连接架(13)上均同样开设有横向的杆槽(10),连接架(13)上的杆槽(10)与支架(14)上的杆槽(10)等高齐平,支撑架(3)的高度高于外壳组件(1)的上表面。
技术总结
本技术公开了一种带有防倾倒结构的搬运机器人,涉及搬运机器人技术领域,该一种带有防倾倒结构的搬运机器人包括用于引导搬运机器人移动的感应式引导部件和内置驱动结构的外壳组件,该一种带有防倾倒结构的搬运机器人还包括展开机构,展开机构包括两个固定架和两个支撑架,两个固定架分别固定连接在外壳组件前后外壁的中间部分,感应式引导部件与外壳组件的连接点位于外壳组件后表面的下端,定位螺杆与不同位置的定位槽活动卡接,来调节两个支撑架之间的间距,使得搬运机器人在搬运面积较大的物件时,可以调整支撑架位置来使得两个支撑架改变与物件底部的支撑点,使得运输横向面积较大的物件时可以提高稳定性和适用性,达到防倾倒的效果。
技术研发人员:高国瑞,邓丽丽,包妍,相蔚,陆婧怡
受保护的技术使用者:沈阳工程学院
技术研发日:20231026
技术公布日:2024/6/2
- 还没有人留言评论。精彩留言会获得点赞!