一种无人驾驶汽车的底盘系统
本技术涉及无人驾驶汽车,具体涉及一种无人驾驶汽车的底盘系统。
背景技术:
1、无人驾驶汽车是一种集合环境感知系统、控制系统和线控底盘系统于一体的能够实现无人驾驶的智能汽车,随着科学技术水平的不断提高,无人驾驶汽车逐渐接近实用化。
2、目前,无人驾驶汽车的转向系统仍参考传统汽车,使用横拉杆同时带动两个转向轮转向,两侧转向轮不能够独立控制,彼此相互干扰,在转向过程中容易出现车身震动和倾斜较大的现象,影响无人驾驶汽车转向的平顺性和机动性。
技术实现思路
1、本实用新型的目的在于克服现有技术的不足,本实用新型提供了一种无人驾驶汽车的底盘系统,通过在底盘车架上搭配使用后轮驱动系统和前轮独立转向系统,能有效提高无人驾驶汽车行驶的平顺性和机动性。
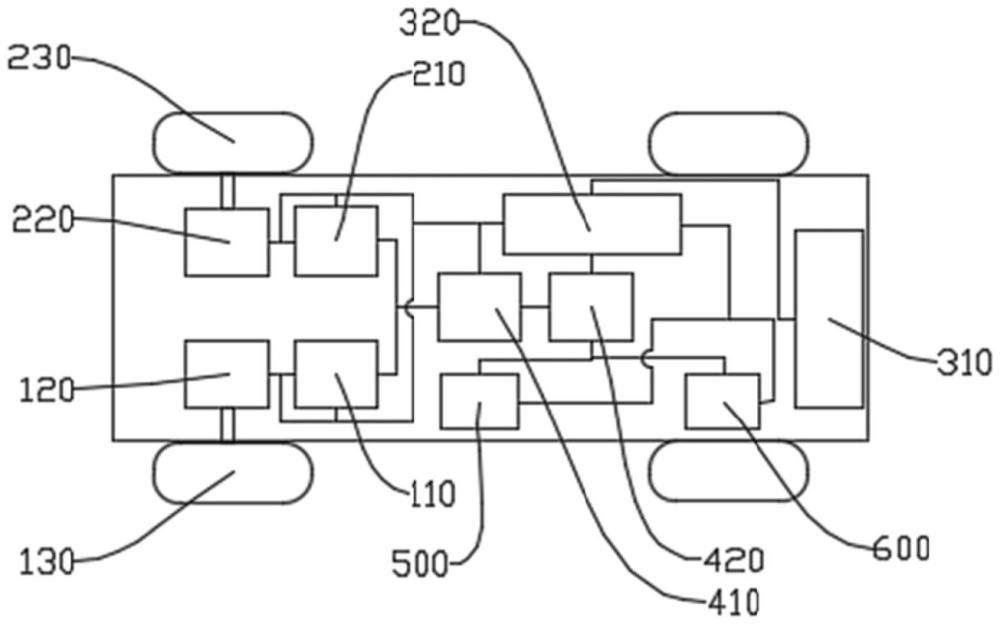
2、本实用新型提供了一种无人驾驶汽车的底盘系统,包括底盘车架以及安装在所述底盘车架上的电池系统、电控系统、驱动系统和转向系统,所述电池系统、所述电控系统、所述驱动系统和所述转向系统之间电连接,所述驱动系统为后轮驱动系统,所述转向系统为前轮独立转向系统,所述前轮独立转向系统包括左前轮转向系统和右前轮转向系统,所述左前轮转向系统和所述右前轮转向系统耦合实时转向;所述左前轮转向系统包括左前控制器和左前转向模块,所述左前控制器和所述左前转向模块电连接,所述左前转向模块通过左前杆和左前轮连接;所述右前轮转向系统包括右前控制器和右前转向模块,所述右前控制器和所述右前转向模块电连接,所述右前转向模块通过右前杆和右前轮连接;所述左前控制器和所述右前控制器均与所述电控系统电连接。
3、具体的,所述左前转向模块包括左前转向电机、左前减速机构和左前转向器,所述左前转向电机和所述左前控制器电连接,所述左前转向电机的输出端和所述左前减速机构的输入端连接,所述左前减速机构的输出端和所述左前转向器的输入端连接,所述左前转向器的输出端通过所述左前杆和所述左前轮连接;
4、所述右前转向模块包括右前转向电机、右前减速机构和右前转向器,所述右前转向电机和所述右前控制器电连接,所述右前转向电机的输出端和所述右前减速机构的输入端连接,所述右前减速机构的输出端和所述右前转向器的输入端连接,所述右前转向器的输出端通过所述右前杆和所述右前轮连接。
5、具体的,所述左前转向模块和所述右前转向模块对称设置。
6、具体的,所述电池系统包括动力电池和直流-直流变压器,所述动力电池的输出端和所述直流-直流变压器的输入端电连接,所述动力电池设置在所述底盘车架的后端,所述直流-直流变压器设置在所述底盘车架的右侧区域;
7、所述直流-直流变压器的输出端分别和所述电控系统、所述左前控制器、所述左前转向模块、所述右前控制器和所述右前转向模块电连接。
8、具体的,所述电控系统包括整车控制器和上位机,所述整车控制器和所述上位机电连接,所述整车控制器和所述上位机均与所述电池系统电连接,所述整车控制器分别和所述左前控制器与所述右前控制器电连接。
9、具体的,所述整车控制器和所述上位机位于所述底盘车架的第一中轴线上,所述第一中轴线是所述底盘车架的左侧区域和右侧区域的中间线。
10、具体的,所述上位机电连接有惯性导航模块,所述惯性导航模块包括三个陀螺仪、三个加速度计和两个磁力计;
11、所述三个陀螺仪分别安装在所述底盘车架的前端、中央和后端,所述三个陀螺仪位于所述第一中轴线上;所述三个加速度计分别安装在所述底盘车架的左前角、右前角和中央,一个所述加速度计位于所述第一中轴线上,另外两个所述加速度计对称设置在所述第一中轴线的两侧;所述两个磁力计分别安装在所述底盘车架的前端和后端,所述两个磁力计位于所述第一中轴线上。
12、具体的,所述上位机还电连接有位姿检测模块,所述位姿检测模块包括两个位姿传感器,所述两个位姿传感器分别安装在所述底盘车架的左后角和右后角上。
13、具体的,所述上位机还电连接有两个重力传感器,所述两个重力传感器分别安装在所述底盘车架的前悬挂和后悬挂上。
14、具体的,所述底盘车架的底部设置有铝合金防护板,所述铝合金防护板的厚度为0.5~1.5cm;
15、所述铝合金防护板上均匀开设有若干透气孔。
16、与现有技术相比,本实用新型的有益效果是:
17、本实用新型的无人驾驶汽车的底盘系统,在底盘车架上搭配使用后轮驱动系统和前轮独立转向系统,前轮独立转向系统包括左前轮转向系统和右前轮转向系统,左前轮转向系统包括左前控制器和左前转向模块,左前控制器控制左前转向模块的运转,左前转向模块通过左前杆带动左前轮转向;右前轮转向系统包括右前控制器和右前转向模块,右前控制器控制右前转向模块的运转,右前转向模块通过右前杆带动右前轮转向,电控系统用于向左前控制器和右前控制器发送指令,控制左前轮和右前轮力矩输出的分配及耦合,实现左前轮和右前轮耦合实时转向,左前轮和右前轮没有直接的机械连接,两者独立转向,不会相互干扰,在转向过程中不容易出现车身震动和倾斜较大的现象,有效提高了无人驾驶汽车转向的平顺性和机动性。
技术特征:
1.一种无人驾驶汽车的底盘系统,包括底盘车架以及安装在所述底盘车架上的电池系统、电控系统、驱动系统和转向系统,所述电池系统、所述电控系统、所述驱动系统和所述转向系统之间电连接,其特征在于,所述驱动系统为后轮驱动系统,所述转向系统为前轮独立转向系统,所述前轮独立转向系统包括左前轮转向系统和右前轮转向系统,所述左前轮转向系统和所述右前轮转向系统耦合实时转向;所述左前轮转向系统包括左前控制器和左前转向模块,所述左前控制器和所述左前转向模块电连接,所述左前转向模块通过左前杆和左前轮连接;所述右前轮转向系统包括右前控制器和右前转向模块,所述右前控制器和所述右前转向模块电连接,所述右前转向模块通过右前杆和右前轮连接;所述左前控制器和所述右前控制器均与所述电控系统电连接。
2.如权利要求1所述的底盘系统,其特征在于,所述左前转向模块包括左前转向电机、左前减速机构和左前转向器,所述左前转向电机和所述左前控制器电连接,所述左前转向电机的输出端和所述左前减速机构的输入端连接,所述左前减速机构的输出端和所述左前转向器的输入端连接,所述左前转向器的输出端通过所述左前杆和所述左前轮连接;
3.如权利要求2所述的底盘系统,其特征在于,所述左前转向模块和所述右前转向模块对称设置。
4.如权利要求1所述的底盘系统,其特征在于,所述电池系统包括动力电池和直流-直流变压器,所述动力电池的输出端和所述直流-直流变压器的输入端电连接,所述动力电池设置在所述底盘车架的后端,所述直流-直流变压器设置在所述底盘车架的右侧区域;
5.如权利要求1所述的底盘系统,其特征在于,所述电控系统包括整车控制器和上位机,所述整车控制器和所述上位机电连接,所述整车控制器和所述上位机均与所述电池系统电连接,所述整车控制器分别和所述左前控制器与所述右前控制器电连接。
6.如权利要求5所述的底盘系统,其特征在于,所述整车控制器和所述上位机位于所述底盘车架的第一中轴线上,所述第一中轴线是所述底盘车架的左侧区域和右侧区域的中间线。
7.如权利要求6所述的底盘系统,其特征在于,所述上位机电连接有惯性导航模块,所述惯性导航模块包括三个陀螺仪、三个加速度计和两个磁力计;
8.如权利要求7所述的底盘系统,其特征在于,所述上位机还电连接有位姿检测模块,所述位姿检测模块包括两个位姿传感器,所述两个位姿传感器分别安装在所述底盘车架的左后角和右后角上。
9.如权利要求8所述的底盘系统,其特征在于,所述上位机还电连接有两个重力传感器,所述两个重力传感器分别安装在所述底盘车架的前悬挂和后悬挂上。
10.如权利要求1所述的底盘系统,其特征在于,所述底盘车架的底部设置有铝合金防护板,所述铝合金防护板的厚度为0.5~1.5cm;
技术总结
本技术公开了一种无人驾驶汽车的底盘系统,涉及无人驾驶汽车技术领域,驱动系统为后轮驱动系统,转向系统为前轮独立转向系统,前轮独立转向系统包括左前轮转向系统和右前轮转向系统,左前轮转向系统和右前轮转向系统耦合实时转向;左前轮转向系统包括左前控制器和左前转向模块,两者电连接,左前转向模块通过左前杆和左前轮连接;右前轮转向系统包括右前控制器和右前转向模块,两者电连接,右前转向模块通过右前杆和右前轮连接;左前控制器和右前控制器均与电控系统电连接。本技术通过在底盘车架上搭配使用后轮驱动系统和前轮独立转向系统,能有效提高无人驾驶汽车行驶的平顺性和机动性。
技术研发人员:邓龙泽,周凤霞,李立,罗锡亮,冯二明
受保护的技术使用者:广东职业技术学院
技术研发日:20231031
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!