一种六足兼轮式应急救援机器人的制作方法
本技术涉及机器人结构领域,特别是涉及一种六足兼轮式应急救援机器人。
背景技术:
1、机器人陆地移动方法大致分为三种——足式、轮式和履带式。轮式机器人在平缓地形具有更好的控制性和更强的驱动能力。履带式机器人可在平缓地面和中等崎岖地面拥有较好的控制性和中上等的驱动能力。相比于其他两种,足式机器人适应更崎岖、恶劣的地形。所以足型机器人拥有无法代替的作用。
2、随着科学与社会的发展,人类在各个领域对足型机器人的需求越来越大。近年来很多足型机器人得到了迅猛发展,其中的代表是双足类人机器人、四足机器人和六足机器人。
3、六足机器人相对于四组机器人和两足机器人,能够以较简单的控制在崎岖地形实现更平稳、灵活的运动,但劣势在于平缓地形行走速度偏慢。
技术实现思路
1、为了克服现有技术的不足,本实用新型提供一种六足兼轮式应急救援机器人,通过设置的多组支腿及其附属的轮式结构,使用者可以通过外接的控制结构,根据不同地形进行变形,在支腿行走时,其中的舵机可在连接杆上进行偏转,调整支腿的角度,而舵机可驱动翻转圆盘进行旋转,调整前关节及其之后结构的角度,前后移动的状态,可方便不同组的支腿结构进行摆动行走,而需要行走轮进行使用时,可通过总线舵机带动后关节向前关节进行偏转,直至后关节上的行走轮结构与地面接触,(其中的后关节的前端会回缩至前关节的后端),而在支腿上,舵机-翻转圆盘-总线舵机可组成三轴偏转结构,满足支腿的各个方向上的偏转。
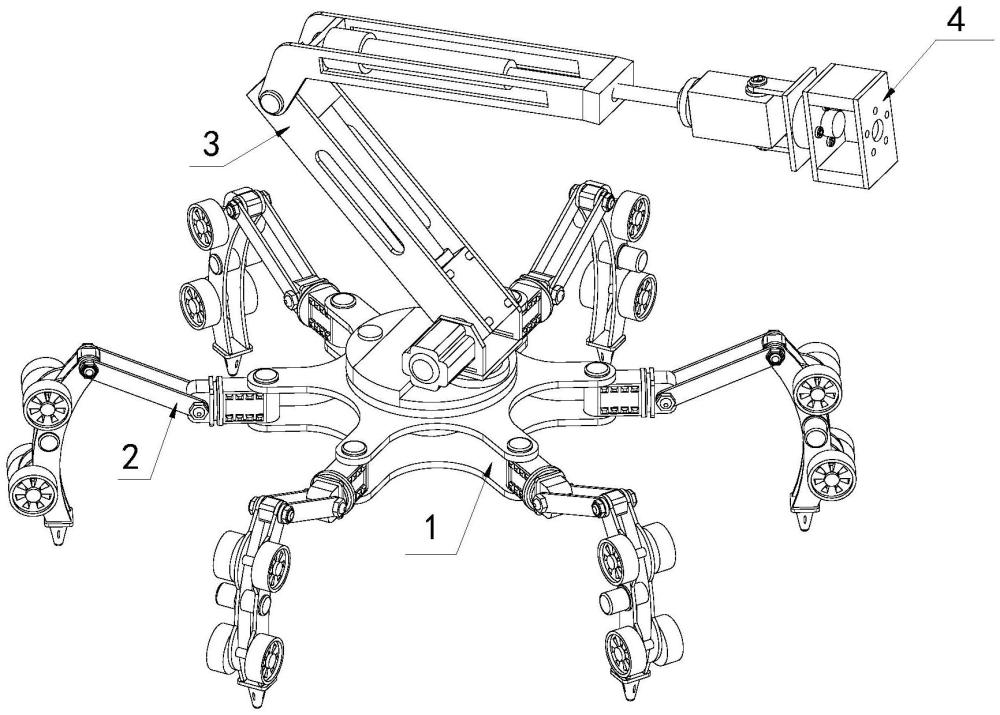
2、为解决上述技术问题,本实用新型提供如下技术方案:一种六足兼轮式应急救援机器人,包括两组底盘,每组所述底盘的中部均向外侧探出六组圆环结构,两组所述底盘之间设置有连接杆进行连接固定,且所述连接杆的外侧均套设有支腿,所述底盘的顶端设置有电池仓、信号接收装置和转台,所述转台的顶端与支架进行固定连接,所述支架的末端与连接头固定连接,所述支腿中包括舵机、前关节和后关节,所述舵机设置于前关节的前端,且所述舵机的输出端与连接杆进行传动连接,所述前关节和后关节通过插销进行活动连接,所述舵机的另一侧输出端与翻转圆盘进行固定连接,所述翻转圆盘的另一端与支腿舵机固定连接,所述后关节上设置有轮式结构,每组所述轮式结构中均包括轮式驱动动力组件和与之传动连接的行走轮,所述支架中包括旋转架、底架、顶架和偏转电机,所述底架和顶架内均分别设置有第一液压杆和第二液压杆。
3、作为本实用新型的一种优选技术方案,所述行走轮在每组支腿上至少对立设置有两组,且每组两个,所述后关节的底部设置有尖锥式结构。
4、作为本实用新型的一种优选技术方案,所述后关节设置于前关节的内部,且所述前关节的末端设置有用于偏转后关节的总线舵机。
5、作为本实用新型的一种优选技术方案,所述旋转架的底端与转台的顶端固定连接,所述顶架活动设置于底架的顶端外侧,所述底架的底端与旋转架固定连接,所述旋转架的外侧设置有驱动电机,且其输出端与底架固定连接。
6、作为本实用新型的一种优选技术方案,所述第一液压杆的两端分别与底架和顶架进行固定连接,所述第二液压杆的一端固定于顶架内,另一端与偏转电机固定连接。
7、作为本实用新型的一种优选技术方案,所述信号接收装置通过无线协议与外接控制结构保持电性连接,所述电池仓的内的电极片与舵机、翻转圆盘、支腿舵机、总线舵机和轮式驱动动力组件之间通过控制结构组件保持电性连接。
8、作为本实用新型的一种优选技术方案,所述偏转电机的输出端与连接头固定连接,且所述连接头的背面开设有多组定位孔结构。
9、与现有技术相比,本实用新型能达到的有益效果是:
10、1、本装置中,通过设置的多组支腿及其附属的轮式结构,使用者可以通过外接的控制结构,根据不同地形进行变形,在支腿行走时,其中的舵机可在连接杆上进行偏转,调整支腿的角度,而舵机可驱动翻转圆盘进行旋转,调整前关节及其之后结构的角度,前后移动的状态,可方便不同组的支腿结构进行摆动行走,而需要行走轮进行使用时,可通过总线舵机带动后关节向前关节进行偏转,直至后关节上的行走轮结构与地面接触,(其中的后关节的前端会回缩至前关节的后端),而在支腿上,舵机-翻转圆盘-总线舵机可组成三轴偏转结构,满足支腿的各个方向上的偏转。
11、2、本装置中,通过设置的旋转架结构通过底部的转台结构带动顶端结构进行偏转,而其中的第一液压杆可驱动顶架向前方进行偏转,扩大内角,而第二液压杆可驱动偏转电机和连接头向前方伸出,满足现场救援对高度、深度、倾角等各个维度上的要求。
12、3、本装置中,在偏转电机的前端设置的连接头结构,可实现与不同种类的机械进行组合连接,使用者只需通过垫片、角码等结构与连接头进行连接固定,可实现对指定部位的指定机械操作,满足现场救援的需要。
技术特征:
1.一种六足兼轮式应急救援机器人,包括两组底盘(1),其特征在于:每组所述底盘(1)的中部均向外侧探出六组圆环结构,两组所述底盘(1)之间设置有连接杆(13)进行连接固定,且所述连接杆(13)的外侧均套设有支腿(2),所述底盘(1)的顶端设置有电池仓(11)、信号接收装置(12)和转台(14),所述转台(14)的顶端与支架(3)进行固定连接,所述支架(3)的末端与连接头(4)固定连接,所述支腿(2)中包括舵机(21)、前关节(24)和后关节(26),所述舵机(21)设置于前关节(24)的前端,且所述舵机(21)的输出端与连接杆(13)进行传动连接,所述前关节(24)和后关节(26)通过插销进行活动连接,所述舵机(21)的另一侧输出端与翻转圆盘(22)进行固定连接,所述翻转圆盘(22)的另一端与支腿舵机(23)固定连接,所述后关节(26)上设置有轮式结构(27),每组所述轮式结构(27)中均包括轮式驱动动力组件(271)和与之传动连接的行走轮(272),所述支架(3)中包括旋转架(31)、底架(32)、顶架(34)和偏转电机(36),所述底架(32)和顶架(34)内均分别设置有第一液压杆(33)和第二液压杆(35)。
2.根据权利要求1所述的一种六足兼轮式应急救援机器人,其特征在于:所述行走轮(272)在每组支腿(2)上至少对立设置有两组,且每组两个,所述后关节(26)的底部设置有尖锥式结构。
3.根据权利要求1所述的一种六足兼轮式应急救援机器人,其特征在于:所述后关节(26)设置于前关节(24)的内部,且所述前关节(24)的末端设置有用于偏转后关节(26)的总线舵机(25)。
4.根据权利要求1所述的一种六足兼轮式应急救援机器人,其特征在于:所述旋转架(31)的底端与转台(14)的顶端固定连接,所述顶架(34)活动设置于底架(32)的顶端外侧,所述底架(32)的底端与旋转架(31)固定连接,所述旋转架(31)的外侧设置有驱动电机,且其输出端与底架(32)固定连接。
5.根据权利要求1所述的一种六足兼轮式应急救援机器人,其特征在于:所述第一液压杆(33)的两端分别与底架(32)和顶架(34)进行固定连接,所述第二液压杆(35)的一端固定于顶架(34)内,另一端与偏转电机(36)固定连接。
6.根据权利要求3所述的一种六足兼轮式应急救援机器人,其特征在于:所述信号接收装置(12)通过无线协议与外接控制结构保持电性连接,所述电池仓(11)的内的电极片与舵机(21)、翻转圆盘(22)、支腿舵机(23)、总线舵机(25)和轮式驱动动力组件(271)之间通过控制结构组件保持电性连接。
7.根据权利要求1所述的一种六足兼轮式应急救援机器人,其特征在于:所述偏转电机(36)的输出端与连接头(4)固定连接,且所述连接头(4)的背面开设有多组定位孔结构。
技术总结
本技术公开了一种六足兼轮式应急救援机器人,包括两组底盘,每组底盘的中部均向外侧探出六组圆环结构,两组底盘之间设置有连接杆进行连接固定,且连接杆的外侧均套设有支腿,底盘的顶端设置有电池仓、信号接收装置和转台,转台的顶端与支架进行固定连接,支架的末端与连接头固定连接,在支腿行走时,其中的舵机可在连接杆上进行偏转,调整支腿的角度,而舵机可驱动翻转圆盘进行旋转,而需要行走轮进行使用时,可通过总线舵机带动后关节向前关节进行偏转,直至后关节上的行走轮结构与地面接触,(其中的后关节的前端会回缩至前关节的后端),而在支腿上,舵机‑翻转圆盘‑总线舵机可组成三轴偏转结构,满足支腿的各个方向上的偏转。
技术研发人员:郝运佳,董作峰,郝伟娜
受保护的技术使用者:山西兰一科技有限公司
技术研发日:20231130
技术公布日:2024/7/25
- 还没有人留言评论。精彩留言会获得点赞!