一种机器人脚掌组件及其腿部结构的制作方法
本技术涉及机器人,尤其涉及一种机器人脚掌组件及其腿部结构。
背景技术:
1、双足机器人是当今机器人领域最前沿的方向之一,与传统的轮式机器人或履带机器人相比,传统的轮式机器人、履带式机器人使用场景的局限性大,传统的轮式机器人难以适应复杂的地形,履带式机器人对于落差较大的地形也难以行走,双足机器人的设计灵感源于人类的双腿,可以适合各种类型的复杂地形,且具有更高的灵活性和适应性。
2、双足机器人的足部是其重要组成部分之一,在双足机器人行走的过程中,足部的缓冲能力以及重心的把控至关重要,目前的机器人的足部结构简单且灵活,但无法实现足部缓冲、也无法反馈地面支撑力,不便于精准控制。
3、因此如何提升机器人足部缓冲效果,同时提升对机器人足部的精准控制,实为本领域的和相关人员所关注的焦点。
技术实现思路
1、有鉴于此,本实用新型提供了一种机器人脚掌组件及其腿部结构,用于解决现有技术中机器人的足部结构的缓冲效果不好,易产生振荡,且无法反馈地面支撑力,不便于对机器人的精准控制的问题。
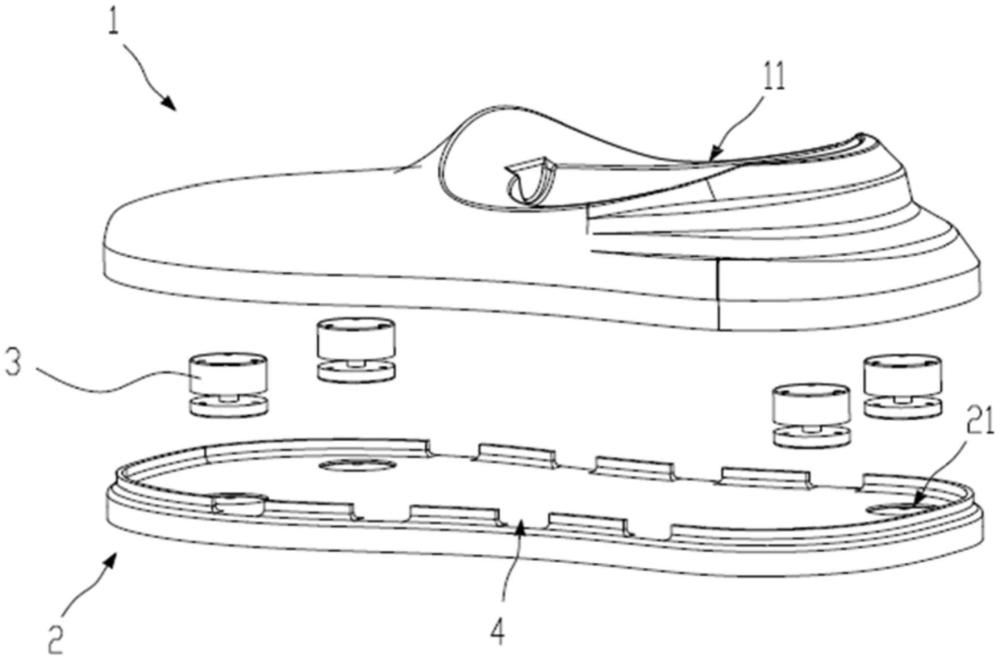
2、为达上述之一或部分或全部目的或是其他目的,本实用新型提出一种机器人脚掌组件,包括脚掌壳、脚底板和多个重力传感器,所述脚掌壳与所述脚底板相连接,所述多个重力传感器的顶部与所述脚掌壳的下端面相连接,所述多个重力传感器的底部与所述脚底板的上端面相连接,所述重力传感器用于监测所述脚掌壳的重心状态。
3、基于上述技术方案,脚掌组件包括脚掌壳、脚底板和多个重力传感器,脚掌壳和脚底板相连接,从而组成脚掌组件的外壳部分,多个重力传感器的顶部与脚掌壳的下端面相连接,多个重力传感器的底部与脚底板的上端面相连接,通过多个重力传感器的配合得到实时数值,监测脚掌壳的重心状态,从而实时的监测机器人整体的重心的情况,判断机器人整体的重心是否存在偏离过度的趋势,从而及时的调整机器人的姿势或者步态,使得机器人的重心始终处于脚掌的范围内,从而使得机器人保持平衡状态,防止机器人摔倒或损坏,掌握对机器人的精准控制。
4、优选地,所述重力传感器的数量为四个,所述四个重力传感器分布在所述脚底板的四周。
5、基于上述技术方案,重力传感器的数量为四个,且四个重力传感器分布在脚底板的四周,通过四个重力传感器的配合,得到实时数值,从而更好的监测机器人整体的重心状态,以便于及时对机器人整体的状态进行调整,避免机器人摔倒或损坏。
6、优选地,所述脚掌壳和所述脚底板组合形成安装槽,所述四个重力传感器设于所述安装槽内。
7、基于上述技术方案,脚掌壳和脚底板组合形成安装槽,四个传感器均安装在安装槽内,通过将四个重力传感器安装在安装槽内,避免四个重力传感器露在外面,在机器人走路过程中造成损伤,便于对重力传感器的保护。
8、优选地,所述安装槽的底壁上开设有四个放置槽,所述四个重力传感器的底部分别设于相对应的所述放置槽内,所述四个重力传感器的顶部均外露于相对应的所述放置槽。
9、基于上述技术方案,安装槽的底壁上开设有四个放置槽,四个放置槽的位置与四个重力传感器的位置相对应设置,以便于将四个重力传感器分别安装在相对应的四个放置槽内,四个重力传感器的底部均安装在与其相对应的放置槽内,四个重力传感器的顶部均外露于放置槽,以便于重力传感器与脚掌壳之间的连接,从而得到实时数值,以便于及时对机器人整体的状态进行调整。
10、优选地,所述脚底板的下端面上开设有一端开口放置腔,所述脚底板的下端面上设置有缓冲件,所述缓冲件安装在所述放置腔内,并将开口封闭。
11、基于上述技术方案,脚底板的下端面上开设有一端开口的放置腔,缓冲件安装在放置腔内,且缓冲件的下端面与放置腔的开口相齐平,从而使得机器人在走路的过程中,缓冲件与地面相接触,从而对机器人的脚掌组件进行缓冲,保护脚掌组件并减少对其的冲击和伤害。
12、优选地,所述缓冲件为橡胶垫或者硅胶垫。
13、基于上述技术方案,缓冲件为橡胶垫或者硅胶垫,橡胶垫和硅胶垫均具有其独特的粘弹性,具有良好的缓冲性能,橡胶垫和硅胶垫均可隔离振动且吸收冲击,从而在机器人走路的过程中,可以很好的保护机器人的脚掌组件。
14、优选地,所述橡胶垫和所述硅胶垫的底部表面上均设置有加工纹路。
15、基于上述技术方案,橡胶垫和硅胶垫的底部表面上均设置有加工纹路,由于设置了加工纹路,从而可以增大橡胶垫或硅胶垫与底面之间的摩擦,提升机器人的脚掌组件的防滑效果,在机器人行走至较为光滑的地面上时,可以很好的降低机器人摔倒的概率。
16、优选地,所述脚掌壳的上端面上开设有安装腔,所述安装腔的上端为开口端,所述安装腔的下端为装配平面,所述开口端用于供脚踝插入所述安装腔,并安装在所述装配平面上。
17、基于上述技术方案,脚掌壳的上端面上开设有安装腔,安装腔的上端为开口端,脚踝可通过开口端插入安装腔内,安装腔的下端为装配平面,从而便于将脚踝平稳的安装在装配平面处,使得脚踝的安装更加平稳。
18、优选地,所述装配平面上开设有多个安装孔,所述脚掌组件还包括多个固定件,所述固定件与所述安装孔相连接,所述固定件用于将脚踝固定在所述装配平面上。
19、基于上述技术方案,装配平面上开设有多个安装孔,脚掌组件还包括多个固定件,固定件的数量与安装孔的数量相同,固定件与安装孔相连接,通过固定件与安装孔之间的连接将脚踝固定在装配平面上,同时使得脚踝稳固的安装在安装腔内。
20、另一方面,本实用新型提出一种机器人腿部结构,包括上述一种机器人脚掌组件。
21、实施本实用新型实施例,将具有如下有益效果:
22、采用了上述机器人脚掌组件及其腿部结构之后,脚掌组件包括脚掌壳、脚底板和多个重力传感器,脚掌壳和脚底板相连接,从而组成脚掌组件的外壳部分,多个重力传感器的顶部与脚掌壳的下端面相连接,多个重力传感器的底部与脚底板的上端面相连接,通过多个重力传感器的配合得到实时数值,监测脚掌壳的重心状态,从而实时的监测机器人整体的重心的情况,判断机器人整体的重心是否存在偏离过度的趋势,从而及时的调整机器人的姿势或者步态,使得机器人的重心始终处于脚掌的范围内,从而使得机器人保持平衡状态,防止机器人摔倒或损坏,掌握对机器人的精准控制,解决了现有技术中机器人的足部结构的缓冲效果不好,易产生振荡,且无法反馈地面支撑力,不便于对机器人的精准控制的问题。
技术特征:
1.一种机器人脚掌组件,其特征在于:包括脚掌壳(1)、脚底板(2)和多个重力传感器(3),所述脚掌壳(1)与所述脚底板(2)相连接,所述多个重力传感器(3)的顶部与所述脚掌壳(1)的下端面相连接,所述多个重力传感器(3)的底部与所述脚底板(2)的上端面相连接,所述重力传感器(3)用于监测所述脚掌壳(1)的重心状态。
2.如权利要求1所述的一种机器人脚掌组件,其特征在于:所述重力传感器(3)的数量为四个,所述四个重力传感器(3)分布在所述脚底板(2)的四周。
3.如权利要求2所述的一种机器人脚掌组件,其特征在于:所述脚掌壳(1)和所述脚底板(2)组合形成安装槽(4),所述四个重力传感器(3)设于所述安装槽(4)内。
4.如权利要求3所述的一种机器人脚掌组件,其特征在于:所述安装槽(4)的底壁上开设有四个放置槽(21),所述四个重力传感器(3)的底部分别设于相对应的所述放置槽(21)内,所述四个重力传感器(3)的顶部均外露于相对应的所述放置槽(21)。
5.如权利要求1所述的一种机器人脚掌组件,其特征在于:所述脚底板(2)的下端面上开设有一端开口的放置腔(22),所述脚底板(2)的下端面上设置有缓冲件(5),所述缓冲件(5)安装在所述放置腔(22)内,并将开口封闭。
6.如权利要求5所述的一种机器人脚掌组件,其特征在于:所述缓冲件(5)为橡胶垫或者硅胶垫。
7.如权利要求6所述的一种机器人脚掌组件,其特征在于:所述橡胶垫和所述硅胶垫的底部表面上均设置有加工纹路。
8.如权利要求1所述的一种机器人脚掌组件,其特征在于:所述脚掌壳(1)的上端面上开设有安装腔(11),所述安装腔(11)的上端为开口端(12),所述安装腔(11)的下端为装配平面(13),所述开口端(12)用于供脚踝插入所述安装腔(11),并安装在所述装配平面(13)上。
9.如权利要求8所述的一种机器人脚掌组件,其特征在于:所述装配平面(13)上开设有多个安装孔(14),所述脚掌组件还包括多个固定件(6),所述固定件(6)与所述安装孔(14)相连接,所述固定件(6)用于将脚踝固定在所述装配平面(13)上。
10.一种机器人腿部结构,其特征在于:包括如权利要求1-9任一项所述的一种机器人脚掌组件。
技术总结
本技术公开了一种机器人脚掌组件及其腿部结构,脚掌组件包括脚掌壳、脚底板和多个重力传感器,脚掌壳与所述脚底板相连接,从而组成脚掌组件的外壳部分,多个重力传感器的顶部与脚掌壳的下端面相连接,多个重力传感器的底部与脚底板的上端面相连接,机器人腿部结构包括机器人脚掌组件,通过多个重力传感器的配合得到实时数值,监测脚掌壳的重心状态,从而监测机器人整体的重心是否存在偏离过度的趋势,及时的调整机器人的姿势或者步态,使得机器人的重心始终处于脚掌的范围内,使机器人保持平衡状态,防止机器人摔倒或损坏,掌握对机器人的精准控制。
技术研发人员:请求不公布姓名
受保护的技术使用者:上海开普勒探索机器人有限公司
技术研发日:20231201
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!