一种机器人大腿传动结构的制作方法
本技术涉及机器人,尤其涉及一种机器人大腿传动结构。
背景技术:
1、人形机器人是仿生机构学的标志性成果,它的外貌特征和关节布局都模仿人体,因此具有与人相似的关节灵活度,从而能完成人的各种肢体动作,机器人的结构件尤其是下肢的主承力件,例如小腿、大腿等,这样的结构件在运动是转动惯性较小,从而提升机器人执行复杂手势等动作的位置准确性。
2、目前的机器人的大腿部件零件数量过多,零件之间采用机械连接,且是三连杆的摆动导杆机构,但是该摆动导杆机构末端输出的力矩和速度的稳定性不好,变化趋势大,从而不便于机器人的稳定运动和行走。
3、因此如何提升机器人的稳定运动和行走,实为本领域的和相关人员所关注的焦点。
技术实现思路
1、有鉴于此,本实用新型提供了一种机器人大腿传动结构,用于解决现有技术中机器人的大腿部件在行走时,大腿末端输出的力矩和速度的稳定性不好,导致机器人行走不稳定的问题。
2、为达上述之一或部分或全部目的或是其他目的,本实用新型提出一种机器人大腿传动结构,包括大腿连接座、第一连杆、第二连杆、驱动件和五个大腿连接件,所述大腿连接座用于与髋腰连接,所述大腿连接座上开设有第一键槽孔,一个所述大腿连接件与所述第一键槽孔转动连接,所述大腿连接座上还开设有一组第一装配孔,一个所述大腿连接件穿过所述一组第一装配孔将所述大腿连接座与所述第一连杆的一端连接,所述第二连杆的一端开设有第二键槽孔,一个所述大腿连接件与所述第二键槽孔转动连接,一个所述大腿连接件将所述第一连杆的另一端、所述第二连杆的另一端和所述驱动件的输出端连接,一个所述大腿连接件与所述驱动件的固定端转动连接,所述五个大腿连接件组合形成五连杆传动机构。
3、优选地,与所述第一键槽孔转动连接的所述大腿连接件为第一大腿连接件,所述第一大腿连接件包括大腿第一转轴和两个第一轴承,所述大腿第一转轴设于所述第一键槽孔内,所述大腿第一转轴的两端外露于所述第一键槽孔,一个所述第一轴承的内壁与所述大腿第一转轴的一端相连接,另一个所述第一轴承的内壁与所述大腿第一转轴的另一端相连接。
4、优选地,将所述大腿连接座和所述第一连杆连接的所述大腿连接件为第二大腿连接件,所述第二大腿连接件包括大腿第二转轴和两个第二轴承,所述第一连杆的一端开设有第三键槽孔,所述大腿第二转轴穿过所述一组第一装配孔与所述第三键槽孔转动连接,所述两个第二轴承分别设置在对应的所述第一装配孔内,且一个所述第二轴承的内壁与所述大腿第二转轴的一端连接,另一个所述第二轴承的内壁与所述大腿第二转轴的另一端连接。
5、优选地,与所述第二键槽孔转动连接的所述大腿连接件为第三大腿连接件,所述第三大腿连接件包括大腿第三转轴和两个第三轴承,所述大腿第三转轴设于所述第二键槽孔内,一个所述第三轴承的内壁与所述大腿第三转轴的一端连接,另一个所述第三轴承的内壁与所述大腿第三转轴的另一端连接,所述两个第三轴承均位于所述第二键槽孔内。
6、优选地,将所述第一连杆、所述第二连杆和所述驱动件连接的大腿连接件为第四大腿连接件,所述第四大腿连接件包括大腿第四转轴和两个第四轴承,所述第二连杆的另一端开设有一组第二装配孔,所述大腿第四转轴穿过所述一组第二装配孔与所述驱动件的输出端转动连接,一个所述第四轴承的内壁与所述大腿第四转轴的一端连接,另一个所述第四轴承的内壁与所述大腿第四转轴的另一端连接,所述两个第四轴承分别设于对应的所述第二装配孔内。
7、优选地,所述第一连杆的另一端开设有一组第三装配孔,所述大腿第四转轴的两端分别穿过所述一组第三装配孔,所述机器人大腿传动结构还包括两个第五轴承,一个所述第五轴承的内壁与所述大腿第四转轴的一端连接,另一个所述第五轴承的内壁与所述大腿第四转轴的另一端连接,所述两个第五轴承分别设于对应的所述第三装配孔内。
8、优选地,与所述驱动件的固定端转动连接的所述大腿连接件为第五大腿连接件,所述第五大腿连接件包括大腿第五转轴,所述大腿第五转轴与所述驱动件的固定端转动连接。
9、优选地,所述驱动件包括电机、第一鱼眼轴承和第二鱼眼轴承,所述电机的输出端与所述第一鱼眼轴承的一端相连接,所述电机的固定端与所述第二鱼眼轴承的一端相连接,所述第一鱼眼轴承的另一端与所述大腿第四转轴转动连接,所述第二鱼眼轴承的另一端与所述大腿第五转轴转动连接。
10、优选地,所述大腿第二转轴的两端均设置有第一外螺纹,所述机器人大腿传动结构还包括两个第一固定件,所述两个第一固定件分别与相对应的所述第一外螺纹连接,以压紧所述第二轴承的内圈;
11、所述大腿第四转轴的两端均设置有第二外螺纹,所述机器人大腿传动结构还包括两个第二固定件,所述两个第二固定件分别与相对应的所述第二外螺纹连接,以压紧所述第四轴承的内圈。
12、优选地,所述大腿连接座的上端面凸出形成定位凸台,所述定位凸台的外周开设有多个第一螺丝孔,所述多个第一螺丝孔用于与髋腰连接。
13、实施本实用新型实施例,将具有如下有益效果:
14、采用了上述机器人大腿传动结构之后,一个大腿连接件与大腿连接座转动连接,一个大腿连接件将第一连杆的一端与大腿连接座连接,一个大腿连接件与第二连杆的一端转动连接,一个大腿连接件将第一连杆的另一端、第二连杆的另一端和驱动件的输出端连接,一个大腿连接件与所述驱动件的固定端转动连接,五个大腿连接件组成五连杆传动机构,比起三连杆的摆动导杆机构,五连杆传动机构可以钝化连杆机构的急回特性,即末端输出的力矩和速度更加稳定,变化的趋势更小,从而更有利于机器人的稳定运动和行走,减小了控制算法的难度,解决了现有技术中机器人的大腿部件在行走时,大腿末端输出的力矩和速度的稳定性不好,导致机器人行走不稳定的问题。
技术特征:
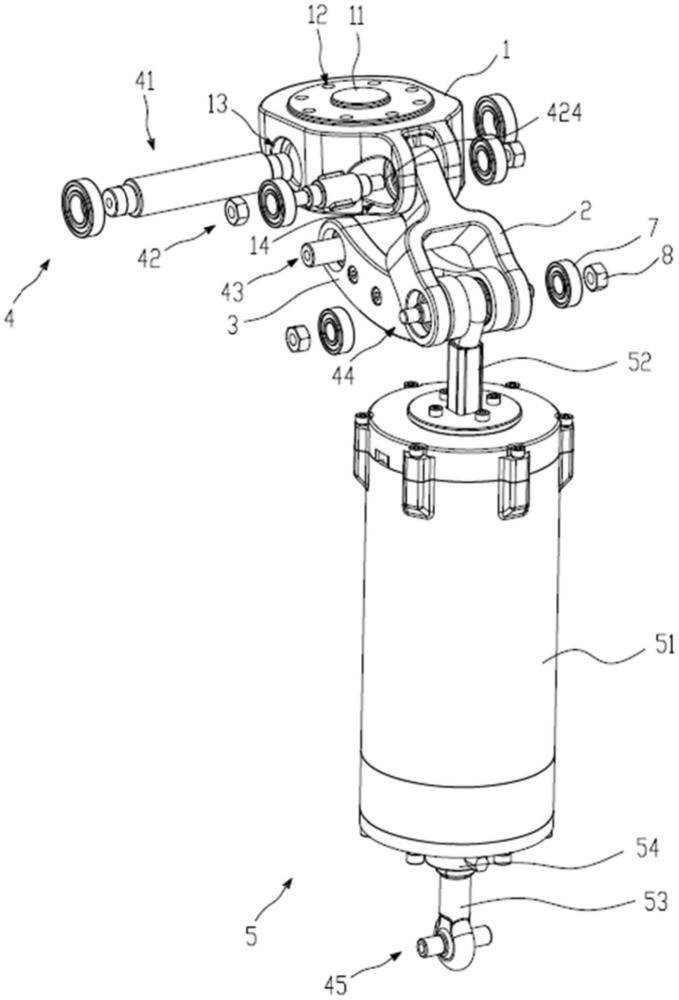
1.一种机器人大腿传动结构,其特征在于:包括大腿连接座(1)、第一连杆(2)、第二连杆(3)、驱动件(5)和五个大腿连接件(4),所述大腿连接座(1)用于与髋腰连接,所述大腿连接座(1)上开设有第一键槽孔(13),一个所述大腿连接件(4)与所述第一键槽孔(13)转动连接,所述大腿连接座(1)上还开设有一组第一装配孔(14),一个所述大腿连接件(4)穿过所述一组第一装配孔(14)将所述大腿连接座(1)与所述第一连杆(2)的一端连接,所述第二连杆(3)的一端开设有第二键槽孔(34),一个所述大腿连接件(4)与所述第二键槽孔(34)转动连接,一个所述大腿连接件(4)将所述第一连杆(2)的另一端、所述第二连杆(3)的另一端和所述驱动件(5)的输出端连接,一个所述大腿连接件(4)与所述驱动件(5)的固定端转动连接,所述五个大腿连接件(4)组合形成五连杆传动机构。
2.如权利要求1所述的一种机器人大腿传动结构,其特征在于:与所述第一键槽孔(13)转动连接的所述大腿连接件(4)为第一大腿连接件(41),所述第一大腿连接件(41)包括大腿第一转轴(411)和两个第一轴承(412),所述大腿第一转轴(411)设于所述第一键槽孔(13)内,所述大腿第一转轴(411)的两端外露于所述第一键槽孔(13),一个所述第一轴承(412)的内壁与所述大腿第一转轴(411)的一端相连接,另一个所述第一轴承(412)的内壁与所述大腿第一转轴(411)的另一端相连接。
3.如权利要求2所述的一种机器人大腿传动结构,其特征在于:将所述大腿连接座(1)和所述第一连杆(2)连接的所述大腿连接件(4)为第二大腿连接件(42),所述第二大腿连接件(42)包括大腿第二转轴(421)和两个第二轴承(422),所述第一连杆(2)的一端开设有第三键槽孔(21),所述大腿第二转轴(421)穿过所述一组第一装配孔(14)与所述第三键槽孔(21)转动连接,所述两个第二轴承(422)分别设置在对应的所述第一装配孔(14)内,且一个所述第二轴承(422)的内壁与所述大腿第二转轴(421)的一端连接,另一个所述第二轴承(422)的内壁与所述大腿第二转轴(421)的另一端连接。
4.如权利要求3所述的一种机器人大腿传动结构,其特征在于:与所述第二键槽孔(34)转动连接的所述大腿连接件(4)为第三大腿连接件(43),所述第三大腿连接件(43)包括大腿第三转轴(431)和两个第三轴承(432),所述大腿第三转轴(431)设于所述第二键槽孔(34)内,一个所述第三轴承(432)的内壁与所述大腿第三转轴(431)的一端连接,另一个所述第三轴承(432)的内壁与所述大腿第三转轴(431)的另一端连接,所述两个第三轴承(432)均位于所述第二键槽孔(34)内。
5.如权利要求4所述的一种机器人大腿传动结构,其特征在于:将所述第一连杆(2)、所述第二连杆(3)和所述驱动件(5)连接的大腿连接件(4)为第四大腿连接件(44),所述第四大腿连接件(44)包括大腿第四转轴(441)和两个第四轴承(442),所述第二连杆(3)的另一端开设有一组第二装配孔(35),所述大腿第四转轴(441)穿过所述一组第二装配孔(35)与所述驱动件(5)的输出端转动连接,一个所述第四轴承(442)的内壁与所述大腿第四转轴(441)的一端连接,另一个所述第四轴承(442)的内壁与所述大腿第四转轴(441)的另一端连接,所述两个第四轴承(442)分别设于对应的所述第二装配孔(35)内。
6.如权利要求5所述的一种机器人大腿传动结构,其特征在于:所述第一连杆(2)的另一端开设有一组第三装配孔(22),所述大腿第四转轴(441)的两端分别穿过所述一组第三装配孔(22),所述机器人大腿传动结构还包括两个第五轴承(7),一个所述第五轴承(7)的内壁与所述大腿第四转轴(441)的一端连接,另一个所述第五轴承(7)的内壁与所述大腿第四转轴(441)的另一端连接,所述两个第五轴承(7)分别设于对应的所述第三装配孔(22)内。
7.如权利要求6所述的一种机器人大腿传动结构,其特征在于:与所述驱动件(5)的固定端转动连接的所述大腿连接件(4)为第五大腿连接件(45),所述第五大腿连接件(45)包括大腿第五转轴(451),所述大腿第五转轴(451)与所述驱动件(5)的固定端转动连接。
8.如权利要求7所述的一种机器人大腿传动结构,其特征在于:所述驱动件(5)包括电机(51)、第一鱼眼轴承(52)和第二鱼眼轴承(53),所述电机(51)的输出端与所述第一鱼眼轴承(52)的一端相连接,所述电机(51)的固定端与所述第二鱼眼轴承(53)的一端相连接,所述第一鱼眼轴承(52)的另一端与所述大腿第四转轴(441)转动连接,所述第二鱼眼轴承(53)的另一端与所述大腿第五转轴(451)转动连接。
9.如权利要求6所述的一种机器人大腿传动结构,其特征在于:所述大腿第二转轴(421)的两端均设置有第一外螺纹(424),所述机器人大腿传动结构还包括两个第一固定件(6),所述两个第一固定件(6)分别与相对应的所述第一外螺纹(424)连接,以压紧所述第二轴承(422)的内圈;
10.如权利要求1所述的一种机器人大腿传动结构,其特征在于:所述大腿连接座(1)的上端面凸出形成定位凸台(11),所述定位凸台(11)的外周开设有多个第一螺丝孔(12),所述多个第一螺丝孔(12)用于与髋腰连接。
技术总结
本技术公开了一种机器人大腿传动结构,包括大腿连接座、第一连杆、第二连杆、驱动件和五个大腿连接件,一个大腿连接件与大腿连接座转动连接,一个大腿连接件将第一连杆的一端与大腿连接座连接,一个大腿连接件与第二连杆的一端转动连接,一个大腿连接件将第一连杆的另一端、第二连杆的另一端和驱动件的输出端连接,一个大腿连接件与驱动件的固定端转动连接,五个大腿连接件组成五连杆传动机构,五连杆传动机构可以钝化连杆机构的急回特性,即末端输出的力矩和速度更加稳定,变化的趋势更小,从而更有利于机器人的稳定运动和行走,减小了控制算法的难度。
技术研发人员:请求不公布姓名
受保护的技术使用者:上海开普勒探索机器人有限公司
技术研发日:20231201
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!