一种线驱仿生青蛙弹跳机器人
本发明涉及机器人,具体涉及一种线驱仿生青蛙弹跳机器人。
背景技术:
1、如今仿生机器人按工作环境分为陆地、水下、空中三种。仿生机器人兼具了生物与机器人的双重特性,正逐步在太空探索、救灾等人类不适合的活动环境中发挥其优越性。在一些非结构性环境中,传统的轮式和履带式机器人的移动能力受到了很大的限制,机器人需要更大的移动范围和更高的移动速度,仿生弹跳机器人灵活性很高,可以在崎岖的地形上快速移动,可以跳跃过比自己高出好几倍的障碍,运动特性很好地满足了更大移动范围,更高移动速度的要求,能在非结构性的复杂环境中运动工作。
2、随着机器人技术的发展,各种各样的机器人投入各行各业进行使用。但是始终难以解决的是复杂崎岖地形上机器人的设计与制造。纵观现有弹跳机器人,主要通过弹簧储能释放、化学能转化及弹性结构实现弹跳动作,结构复杂、释放时能量损耗较多并且难以达到远距离跳跃。
技术实现思路
1、本发明的目的在于提供一种线驱仿生青蛙弹跳机器人,解决以下技术问题:
2、难以解决的是复杂崎岖地形上机器人的设计与制造。纵观现有弹跳机器人,主要通过弹簧储能释放、化学能转化及弹性结构实现弹跳动作,结构复杂、释放时能量损耗较多并且难以达到远距离跳跃。
3、本发明的目的可以通过以下技术方案实现:
4、一种线驱仿生青蛙弹跳机器人,包括主体结构,所述主体结构前侧呈对称布设有两组前腿支撑结构,前腿支撑结构用于支撑主体结构的前侧部分,其后侧布设有后腿弹跳结构,后腿弹性结构用于支撑主体结构的后侧部分并驱动主体结构向前跳跃;
5、所述后腿弹跳结构包括支撑后肢,主体结构前端呈对称固定布设支座,两侧支座之间转动布设支轴,支轴两端分别套设有套肩;
6、其中,两侧所述套肩通过弹簧钢片与支撑后肢连接;
7、还包括驱动机构,所述驱动机构用于拉动支撑后肢朝向主体结构方向运动以挤压弹簧钢片变形以产生弹力。
8、优选的,所述支撑后肢底部呈对称定位座,两侧定位座之间开设通孔,驱动机构包括穿设于两侧通孔之间的牵引线,主体结构中开设腔体,腔体中转动布设有用于拉紧牵引线的束紧部。
9、优选的,所述束紧部包括转动布设于腔体中的固定座,固定座一侧沿径向开设凹槽,凹槽两侧分别开设弧形槽,弧形槽槽壁开设用于嵌设工作扭簧的嵌入槽,工作扭簧的一端穿过固定座开设的通槽延伸至外侧,牵引线的另一端缠绕在两侧工作扭簧的另一端,固定座与布设于主体结构上的电机输出端固定。
10、优选的,所述腔体中还布设有转向件,牵引线穿过通孔后经由转向件并缠绕在工作扭簧的一端。
11、优选的,所述支撑后肢一侧设置有斜切面。
12、优选的,所述套肩一侧开设第一插槽,支撑后肢上开设第二插槽,弹簧钢片两端分别插接至第一插槽与第二插槽中定位。
13、优选的,所述前腿支撑结构包括固定布设于主体结构底部的固定架,固定架底端与连接杆转动连接,连接杆另一端转动布设有前爪。
14、优选的,所述固定架上开设第一定位孔,连接杆上开设第二定位孔,第一定位孔与第二定位孔之间固定布设缓冲扭簧。
15、本发明的有益效果:
16、(1)本发明通过驱动机构拉动支撑后肢朝向主体结构方向运动,支撑后肢在运动的过程中挤压弹簧钢片弯曲并产生弹性力,当支撑后肢与地面抵接时,驱动机构释放对支撑后肢的拉力,弹簧钢片在弹性复位的过程中给予主体结构一个驱动力,弹力瞬间释放,使得主体结构向前方跳跃,本发明通过线驱使弹簧钢片弯曲获得大量能量,并且可以瞬间释放弹性势能,使弹性势能利用率达到最大化,其次,相比于其他弹跳机器人的没有过多复杂结构,制作成本低廉;
17、(2)本发明中,当该仿生青蛙弹跳机器人经过一次跳跃后落地时,其前爪首先接触地面,连接杆挤压缓冲扭簧进行压缩并吸收能量,起到缓冲的作用,实现平稳落地。
技术特征:
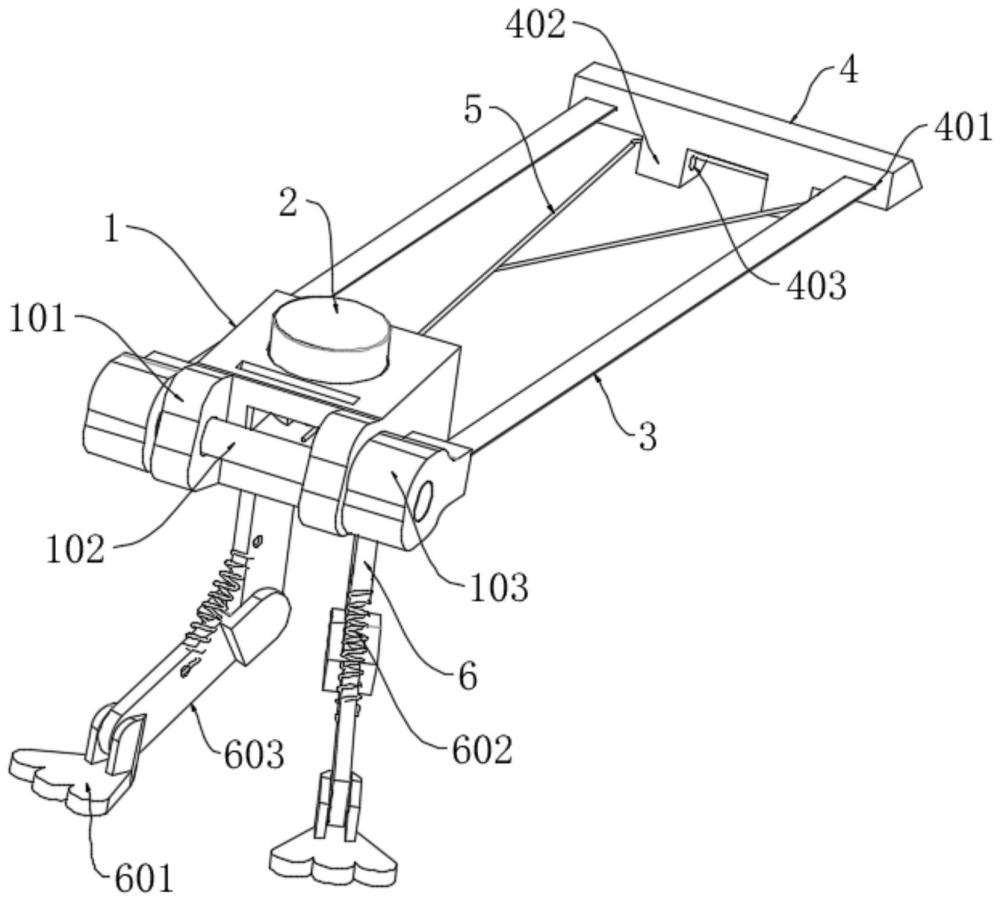
1.一种线驱仿生青蛙弹跳机器人,包括主体结构(1),其特征在于,所述主体结构(1)前侧呈对称布设有两组前腿支撑结构,前腿支撑结构用于支撑主体结构(1)的前侧部分,其后侧布设有后腿弹跳结构,后腿弹性结构用于支撑主体结构(1)的后侧部分并驱动主体结构(1)向前跳跃;
2.根据权利要求1所述的一种线驱仿生青蛙弹跳机器人,其特征在于,所述支撑后肢(4)底部呈对称定位座(402),两侧定位座(402)之间开设通孔(403),驱动机构包括穿设于两侧通孔(403)之间的牵引线(5),主体结构(1)中开设腔体(105),腔体(105)中转动布设有用于拉紧牵引线(5)的束紧部。
3.根据权利要求2所述的一种线驱仿生青蛙弹跳机器人,其特征在于,所述束紧部包括转动布设于腔体(105)中的固定座(201),固定座(201)一侧沿径向开设凹槽(205),凹槽(205)两侧分别开设弧形槽(206),弧形槽(206)槽壁开设用于嵌设工作扭簧(203)的嵌入槽(207),工作扭簧(203)的一端穿过固定座(201)开设的通槽(204)延伸至外侧,牵引线(5)的另一端缠绕在两侧工作扭簧(203)的另一端,固定座(201)与布设于主体结构(1)上的电机(2)输出端固定。
4.根据权利要求3所述的一种线驱仿生青蛙弹跳机器人,其特征在于,所述腔体(105)中还布设有转向件(106),牵引线(5)穿过通孔(403)后经由转向件(106)并缠绕在工作扭簧(203)的一端。
5.根据权利要求1所述的一种线驱仿生青蛙弹跳机器人,其特征在于,所述支撑后肢(4)一侧设置有斜切面(404)。
6.根据权利要求1所述的一种线驱仿生青蛙弹跳机器人,其特征在于,所述套肩(103)一侧开设第一插槽(104),支撑后肢(4)上开设第二插槽(401),弹簧钢片(3)两端分别插接至第一插槽(104)与第二插槽(401)中定位。
7.根据权利要求1所述的一种线驱仿生青蛙弹跳机器人,其特征在于,所述前腿支撑结构包括固定布设于主体结构(1)底部的固定架(6),固定架(6)底端与连接杆(603)转动连接,连接杆(603)另一端转动布设有前爪(601)。
8.根据权利要求7所述的一种线驱仿生青蛙弹跳机器人,其特征在于,所述固定架(6)上开设第一定位孔(605),连接杆(603)上开设第二定位孔(604),第一定位孔(605)与第二定位孔(604)之间固定布设缓冲扭簧(602)。
技术总结
本发明公开了一种线驱仿生青蛙弹跳机器人,涉及机器人技术领域,包括主体结构,所述主体结构前侧呈对称布设有两组前腿支撑结构,前腿支撑结构用于支撑主体结构的前侧部分,其后侧布设有后腿弹跳结构,后腿弹性结构用于支撑主体结构的后侧部分并驱动主体结构向前跳跃;所述后腿弹跳结构包括支撑后肢,主体结构前端呈对称固定布设支座,两侧支座之间转动布设支轴,支轴两端分别套设有套肩;其中,两侧所述套肩通过弹簧钢片与支撑后肢连接;还包括驱动机构,所述驱动机构用于拉动支撑后肢朝向主体结构方向运动以挤压弹簧钢片变形以产生弹力;相比于其他弹跳机器人的没有过多复杂结构,制作成本低廉。
技术研发人员:张子涵,张晓敏,吴泽萱
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!