一种山地油电混动增程式轮履互换全地形拖拉机
本发明涉及农用机械,更具体的说是涉及一种山地油电混动增程式轮履互换全地形拖拉机。
背景技术:
1、拖拉机为牵引和驱动作业机械完成各项移动式作业的自走式拖拉机,也可做固定作业动力。一般由发动机、传动、行走、转向、液压悬挂、动力输出、电器仪表、驾驶操纵及牵引等系统或装置组成,传统拖拉机在平原地区因其动力输出及较好通过性,作为农用机械的主力军。而在丘陵山地区域,其体型庞大,在山地区域转向、作业等方面表现不如平原区域,因此轮履互换全地形拖拉机因其较小的体型、转向灵活、降低能耗、地形适应性强等优点,更加适合丘陵山地地区。
2、但是目前市面上公开使用的拖拉机主要由手扶拖拉机改装的轮式运输机或履带式运输机,由此使得拖拉机不能应用在不同场景。轮式拖拉机适用于快速移动和灵活作业的农业机械,但在特定的地形和条件下可能面临牵引能力和土壤保护的挑战;而履带式拖拉机在应对恶劣地形条件和大规模耕作时表现出色,但其较慢的速度和较差的机动性限制了其在其他场景的应用。
3、因此,如何提供一种体积小、转弯灵活,操作方便、更适合丘陵山地区域的增程式轮履互换拖拉机,是本领域技术人员亟需解决的问题。
技术实现思路
1、为此,本发明的目的在于提出一种山地油电混动增程式轮履互换全地形拖拉机,解决现有技术中传统拖拉机在丘陵地区作业能力不足的问题。
2、本发明提供了一种山地油电混动增程式轮履互换全地形拖拉机,包括:
3、机体,所述机体下方连接四个车轮,其中四个车轮均通过驱动电机驱动,通过电控转向机构完成转向;
4、其中电控转向机构通过电控转向总成与转向连杆连接,所述转向连杆两端位于转向电机正上方;电控转向总成接收电控摇杆的信号后,向所述转向电机发出指令,使转向轴跟随转向电机实现四轮转向;
5、电控摇杆,所述摇杆具有多键位操作,实现拖拉机一键启动、转向操作、被安装在三点悬挂后方的装置的启动与升降;
6、发动机,所述发动机为所述前轮驱动电机充电,实现增程;
7、履带,两个前轮及两个后轮外圆周上至少设置有圆柱形凸起的纹路,所述纹路与所述履带上的圆形凹槽配合,实现履带与车轮的配合定位。
8、进一步地,所述车轮花纹之间设置有锥台状的纹路,所述履带的圆形凹槽形状与锥台适配。花纹还包括位于锥台状纹路两侧的人字形花纹。
9、进一步地,履带中至少一处可拆卸位置。
10、进一步地,可拆卸位置处对应的履带销杆上连接有圆孔拉环柱塞,通过圆孔拉环柱塞将销杆抽拉于履带连接处的销孔内,实现履带的拆卸与连接。
11、进一步地,所述机体的前机盖上还设置有一体接收机及触摸屏;在前机盖前端的安装孔内安装有摄像头,前机盖下部固定有与所述一体接收机、所述触摸屏及所述摄像头连接的控制系统;所述控制系统同时连接所述驱动电机、所述发动机的控制端及所述电控摇杆。
12、进一步地,所述控制系统具有无人驾驶模式及手动驾驶模式。
13、进一步地,还包括遥控器,所述遥控器连接所述驱动电机及所述电控摇杆。
14、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种山地油电混动增程式轮履互换全地形拖拉机,前后轮均采用驱动电机驱动,结构紧凑,发动机为驱动电机充电进行增程,保证了拖拉机的工作里程,使得拖拉机在体积上更小,转弯更加轻便。
15、为使得拖拉机可以在丘陵山区复杂地形如沟渠或坡地进行移动,本发明采用可拆卸配合式履带,以车轮作为驱动轮,驱动履带在复杂地形行走,电控转向机构锁定时,转向通过电机实现车轮正反向控制方向,在旱地等平地可对履带进行拆卸,同时电控转向机构锁定解除,使用车轮进行行走,提高拖拉机的转向灵活性可以适应于多种工作环境。
16、本发明为使得拖拉机能够进行无人驾驶控制改装,采用驱动电机进行行走驱动,提高拖拉机的可控制性,为提高拖拉机的续航,采用发动机进行增程。保证了拖拉机在丘陵山地区域进行稳定行走。
17、目前随着无人驾驶农业机械的研发,使用电控对传统农业机械改进是有必要的,相较于传统机械式控制,采用电控能够有效降低控制难度和避免庞大的机械传动结构,考虑到采用电驱的电量损耗较快,使用增程式进行拖拉机改进能有效解决电驱的续航不足的问题。
18、本发明通过使用一体接收机和电控摇杆对拖拉机的行进方向进行控制,通过一体接收机内的gps进行定位,使拖拉机可以进行直线行走,通过触摸屏进行路线选择,实现了拖拉机的无人驾驶功能。
技术特征:
1.一种山地油电混动增程式轮履互换全地形拖拉机,其特征在于,包括:
2.根据权利要求1所述的一种山地油电混动增程式轮履互换全地形拖拉机,其特征在于,所述车轮(3-2)花纹之间设置有锥台状的纹路,所述履带(3-3)的圆形凹槽形状与锥台适配。
3.根据权利要求1所述的一种山地油电混动增程式轮履互换全地形拖拉机,其特征在于,履带中至少一处可拆卸位置。
4.根据权利要求3所述的一种山地油电混动增程式轮履互换全地形拖拉机,其特征在于,可拆卸位置处对应的履带销杆上连接有圆孔拉环柱塞(3-5),通过圆孔拉环柱塞(3-5)将销杆抽拉于履带连接处的销孔内,实现履带的拆卸与连接。
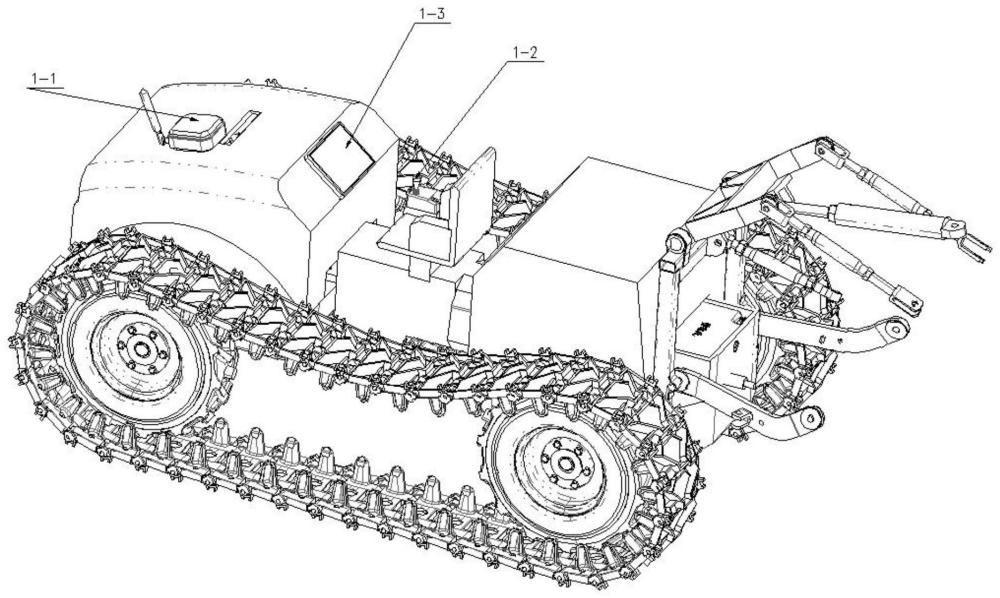
5.根据权利要求1所述的一种山地油电混动增程式轮履互换全地形拖拉机,其特征在于,所述机体的前机盖上还设置有一体接收机(1-1)及触摸屏(1-3);在前机盖前端的安装孔内安装有摄像头(1-5),前机盖下部固定有与所述一体接收机(1-1)、所述触摸屏(1-3)及所述摄像头(1-5)连接的控制系统(1-4);所述控制系统(1-4)同时连接所述驱动电机(3-1)、所述发动机(1-6)的控制端及所述电控摇杆(1-2)。
6.根据权利要求5所述的一种山地油电混动增程式轮履互换全地形拖拉机,其特征在于,所述控制系统(1-4)具有无人驾驶模式及手动驾驶模式。
7.根据权利要求5所述的一种山地油电混动增程式轮履互换全地形拖拉机,其特征在于,还包括遥控器,所述遥控器连接所述驱动电机(3-1)以及所述电控摇杆(1-2)。
技术总结
本发明涉及一种山地油电混动增程式轮履互换全地形拖拉机,包括机体,控制部分、轮履互换部分;机体下方连接四个车轮,四个车轮通过驱动电机控制,通过电控转向机构完成转向;当电池电量消耗到一定程度时,使发动机启动,但并不直接介入到电机中,而是为电池提供能量对电机的动力电池进行充电;其拖拉机控制部分采用带有多个按钮的电控摇杆控制,控制拖拉机电机的启停以及后方加装机具的启停与升降;两个前轮及两个后轮外圆周上均设置有纹路,所述纹路与所述履带上的凹槽配合。本发明能够有效减小拖拉机体积,提高拖拉机在丘陵地形的通过性,较小的转弯半径使其在狭窄区域灵活转向;实现了无人驾驶操作,采用增程式发动机能够有效增加续航里程。
技术研发人员:赵立军,贾云帆,李志琦,陆续,殷文科,杨贵彬,张雪峰,黎斌,李强,龚练,吕程
受保护的技术使用者:重庆文理学院
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!