一种农业机器人拖车的制作方法
本发明涉及机械零部件和电子信息系统设计,特别涉及一种农业机器人拖车设计领域和基于单片机开发的控制程序和相关硬件设计领域。
背景技术:
1、随着农业现代化的发展和农业生产规模的不断扩大,农业拖车作为农业生产的重要工具,具有广阔的市场空间。在目前的市场中,农业拖车主要分为手推式拖车和机动式拖车两种类型。手推式拖车适用于小规模农场和个人农户,机动式拖车适用于大型农场和农业合作组织。如今,机器人在农业中新兴应用包括杂草控制、云播种、播种、收获、环境监测和土壤分析,随着电机、电池等硬件技术,以及诸如模糊pid控制,神经网络控制等软件技术的发展,使得在农业机器人拖车上搭配一套电子系统成为可能。
技术实现思路
1、本公开实施例涉及一种农业机器人拖车,其能够增加农业机器人可携带的货物量,解决农业机器人以及拖车在携带大量货物,尤其是在崎岖的农田小路中,由于路面起伏变化等因素,导致拖车对机器人本体产生拖拽,进而造成机器人与拖车组成的系统产生方向摇摆、速度不稳的耦合振荡问题。
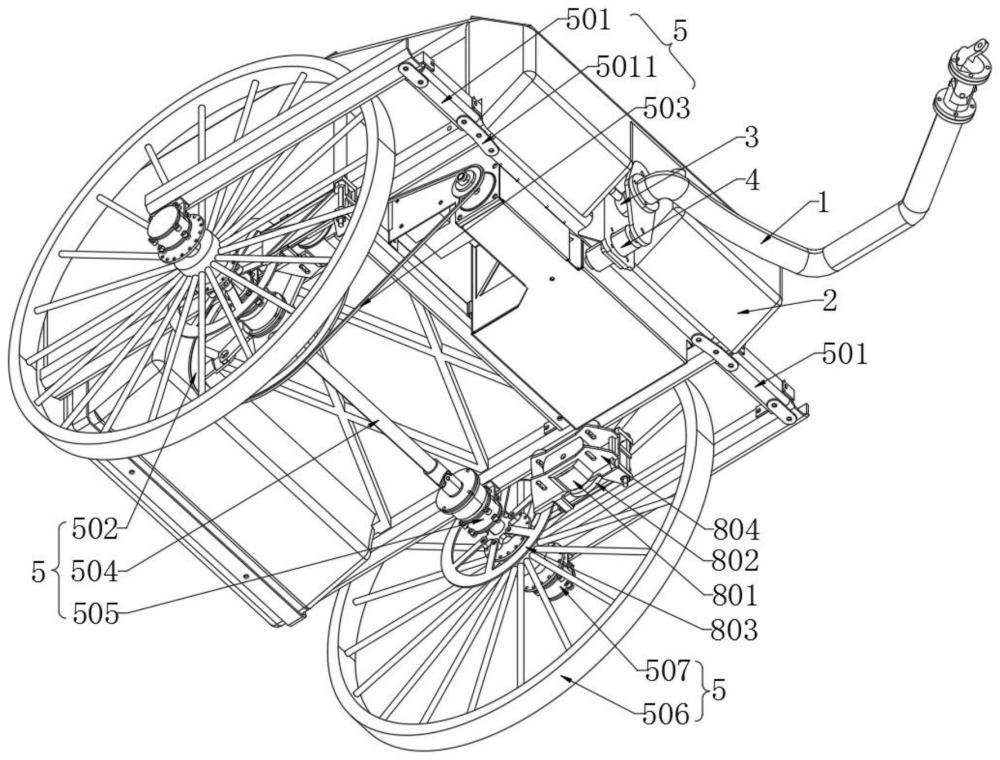
2、本公开第一方面,提供了一种农业机器人拖车,具体包括: 拉杆、车厢、力传感器、滑块光杆导向机构、行驶系统、控制系统、驱动系统和制动系统;
3、其特征在于,所述拉杆由一个金属管通过折弯工艺制成,与行驶系统的车架连接处安装有力传感器和滑块光杆导向机构,其作用是连接农业机器人和车架,为农业机器人拖车的前进或转向提供信号或引导,所述车厢固定在车架上,车架由金属件连接而成,车厢由支架和纺织物的搭配或者轻型材料制成,上端和前部设有门体,车厢的后侧门体内设有一个大空腔,前侧的门体内侧设有两组前储物腔,可以形成封闭空间保证货物安全,其作用是装载货物;
4、所述控制系统包括单片机、变压器、电机控制器和信号转换器,驱动系统包括电源和电机;
5、所述单片机、变压器、电机控制器和信号转换器分别固定在车架上,电源和电机也分别固定在车架上,且控制系统与驱动系统之间电性连接;
6、行驶系统还包括齿轮、链条和车轴;
7、所述车轴上还安装有齿轮,且齿轮与电机之间通过链条传动连接;
8、所述制动系统包括电磁铁、来令片、制动碟片、制动器内侧部件和制动器外侧部件;
9、所述电磁铁安装在制动器内侧部件内,且制动器内侧部件与车架固定相连,所述制动碟片安装在车轴上,来令片安装在制动器外侧部件内侧,并与制动碟片的一侧相对,且制动器外侧部件转动连接在制动器内侧部件的一端。
10、至少一些实施例中,所述行驶系统还包括单向轴承、车轮和连接件;
11、所述车轴的两侧还分别套装有单向轴承,且单向轴承卡装在车架的底侧端,所述车轴的两端还分别安装有车轮与连接件。
12、本发明提供了一种农业机器人拖车,具有如下有益效果:
13、1、本发明在拉杆上设置力传感器,当农业机器人加速无制动、上坡无制动或者农业机器人无制动且与拖车的加速度不一致时,拉杆中的力传感器产生拉力,该拉力信号经过adc转换器变为数字信号进入控制系统,经由模糊pid自适应控制算法产生pwm驱动信号,经由电机控制器对电机进行驱动,驱动力传递到行驶系统,对农业机器人拖车进行驱动,从而抵消因特殊工况产生的拉力对农业机器人带来的拖拽作用,提高机器人与拖车组成的系统的行驶稳定性;并且在农业机器人制动时,类似开关信号的制动传感器信号进入控制系统,经由一定控制算法产生制动信号,制动信号经由dac转变为模拟信号,再通过运算放大器放大,为电磁铁供电使得制动系统开始工作,对农业机器人拖车进行制动,从而达成与农业机器人的同步制动效果,避免甩尾或打滑情况的发生,大大提高行驶的安全性;当正常行驶时,控制系统使用模糊pid自适应控制算法对不断变化的拉杆受力进行分析计算,通过驱动系统控制农业机器人拖车主动跟随农业机器人,使机器人在携带大量货物的行驶中的负担大大减小、运行更加平稳,且减轻货物的颠簸损坏。
14、2、本发明通过在车厢上设置大空腔,并做合理的重心安排以及合理的轮距安排,能够装载更大体积更大重量的货物,增加农业机器人系统可携带的货物量,替代传统的在农业机器人本体上堆叠货物携带方案,提高了装载能力的同时也提高的安全性。
技术特征:
1.一种农业机器人拖车,包括:拉杆(1)、车厢(2)、力传感器(3)、滑块光杆导向机构(4)、行驶系统(5)、控制系统(6)、驱动系统(7)和制动系统(8);
2.根据权利要求1所述的一种农业机器人拖车,其特征在于:所述车厢(2)的后侧门体(201)内设有一个大空腔(202),前侧的门体(201)内侧设有两组前储物腔(203)。
3.根据权利要求1所述的一种农业机器人拖车,其特征在于:所述行驶系统(5)还包括单向轴承(505)、车轮(506)和连接件(507);
技术总结
本发明提供一种农业机器人拖车,涉及农业机器人拖车领域,包括:行驶系统、控制系统、驱动系统和制动系统;所述拉杆与行驶系统的车架连接处安装有力传感器和滑块光杆导向机构,所述控制系统包括单片机、变压器和电机控制器,驱动系统包括电源和电机;所述制动系统包括电磁铁、来令片、制动碟片、制动器内侧部件和制动器外侧部件;所述电磁铁安装在制动器内侧部件内,来令片安装在制动器外侧部件内侧。能够增加农业机器人可携带的货物量,并使农业机器人在携带大量货物的行驶中的负担大大减小,解决了农业机器人以及拖车在携带大量货物时,由于路面起伏变化等因素,容易造成机器人与拖车组成的系统产生方向摇摆、速度不稳等耦合振荡问题。
技术研发人员:孙靖羿,吴昊,陆科,徐瑞东,安浩,马文达,王怀德,彭益鸣,苏家靖,郭大禹,罗煜鹏
受保护的技术使用者:安拓博特机器人(上海)有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!