一种基于线性弹簧机构的仿生青蛙弹跳机器人
本发明涉及仿生青蛙弹跳机器人,尤其涉及一种基于线性弹簧机构的仿生青蛙弹跳机器人。
背景技术:
1、现如今对仿生领域的大规模研究,人们通过仿生机械完成了现如今人类不方便开展的工作。目前,国外加州大学的跳跃机器人模仿了婴猴的跳跃技巧,最大跳跃高度能达到一米,但由于缺乏稳定性,连续跳跃受到限制。利用驱动弹簧的电机将该机构集成到机器人中,通过腿部机构加载能量,以形成婴猴的那种蹲伏。通过这种方式,salto能够达到比单次跳跃更高的高度。但是此装置是发挥出垂直向上的跳跃,并且装置结构复杂,推广性受到限制。另外,国内哈尔滨工业大学发明的仿生青蛙,此类仿生青蛙机器人后肢具有三个关节,由气动肌肉驱动,由弹簧复位,保证其持续运动。其对电机要求高,一般需伺服电机,造价偏高,结构复杂,一般用于学术研究等特殊用途,并未投入市场应用。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于线性弹簧机构的仿生青蛙弹跳机器人,可以用较小的小电机通过齿轮减速、丝杆减速获得较大力矩压缩弹簧以存储较多弹性势能,使其得跳的更远,具有成本低、结构简单、自动复位等优良性能。
2、为了实现上述目的,本发明采用了如下技术方案:
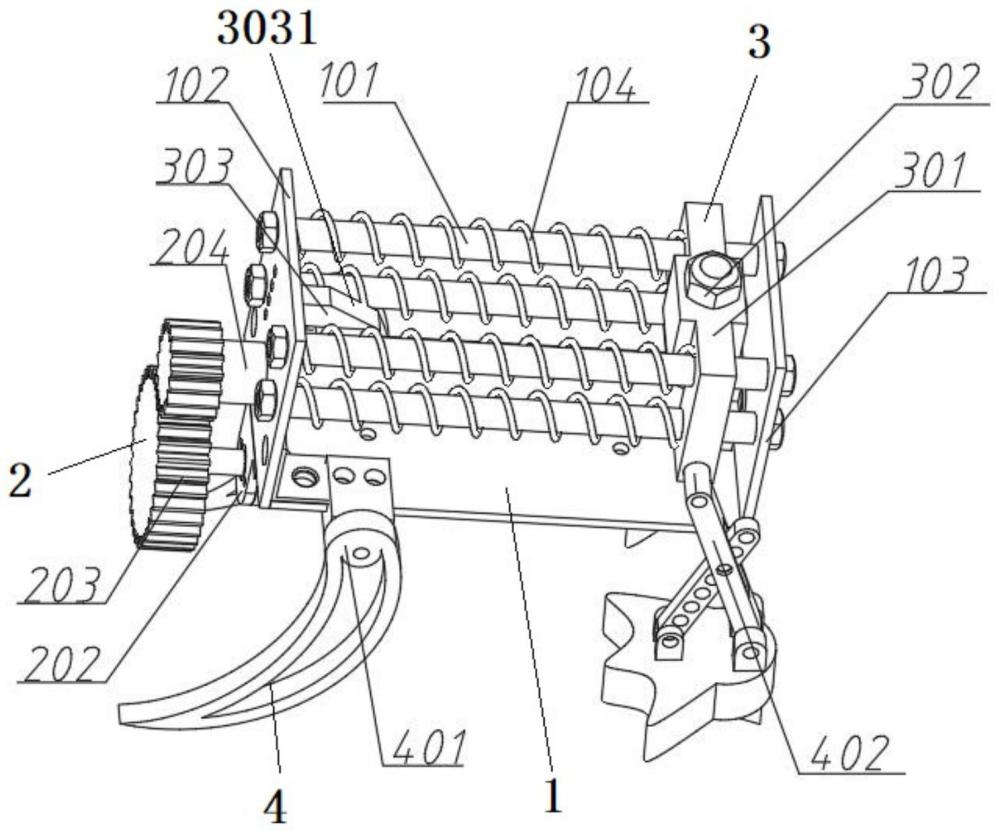
3、一种基于线性弹簧机构的仿生青蛙弹跳机器人,包括仿生青蛙弹跳机器人主体,所述仿生青蛙弹跳机器人主体包括机身、以及与机身连接的腿部结构、减速机构和自动复位机构;
4、所述机身包括l型主板、设于l型主板前端部的前板,所述前板通过角铝与l型主板螺栓连接,所述l型主板上安装有若干根导向柱,若干根导向柱为两组,两组导向柱并排间隔设置,且每组导向柱为两根,两根导向柱上下间隔设置;
5、每根导向柱的一端通过螺母与l型主板锁紧固定连接,每根导向柱的另一端通过螺母与前板锁紧固定连接,且每根导向柱上均套接有第一弹簧。
6、优选地,所述减速机构包括设于l型主板底部的小电机、安装于l型主板上的丝杆、以及设于前板一侧的齿轮对;所述小电机通过电机固定器与l型主板螺栓连接,所述小电机的输出轴与齿轮对连接,所述丝杆的一端通过滚动轴承与l型主板连接,所述丝杆的另一端通过滚动轴承贯穿前板与齿轮对连接;所述丝杆上套接一滑块,所述滑块与丝杆螺纹连接;所述小电机分别与电源和控制模块电性连接,由控制模块控制小电机驱动齿轮对转动进而将动力传输至丝杆,由丝杆带动滑块做往复直线运动。
7、优选地,所述丝杆的两侧设有固定杆,两根固定杆对称设置,且两根固定杆均贯穿滑块,两根固定杆的一端均与l型主板连接,两根固定杆的另一端均与前板连接。
8、优选地,所述滑块的下端部中间位置设有第一安装孔,所述第一安装孔的两侧对称设有第二安装孔。
9、通过采用上述技术方案:此处采用两根固定杆与丝杆配合作用,使得滑块在做滑动往复运动时更平稳。
10、优选地,所述自动复位机构包括套接于导向柱上的挡板、以及设于前板内侧的复位弹扣,所述挡板的下端部中间位置开设有一槽口,所述槽口处设有挡块,所述挡块与滑块的上端部对应设置。
11、优选地,所述挡块上竖直设有一连接杆,所述连接杆与挡板螺母连接,所述连接杆上套接有复位弹簧,所述挡块的一侧设有滑动杆,所述滑动杆与复位弹扣同侧设置;所述挡板上设有用于导向柱套接的第三安装孔。
12、优选地,所述复位弹扣与滑动杆接触的一面为第一倾斜面,所述滑动杆能够在第一倾斜面上滑动;所述挡块的底部左侧设有第二倾斜面。
13、通过采用上述技术方案:当挡块被推动至复位弹扣处时,其滑动杆能够在第一倾斜面上滑动,而滑动过程中复位弹簧将会被压缩使得挡块与滑块脱离接触实现弹簧弹力释放;此时采用arduino控制板根据事先设定的驱动电机正反转程序驱动滑块反转,至再次与挡块的第二倾斜面接触时压缩挡块上移,滑块达到最左端完成自动复位。
14、优选地,所述腿部结构包括包括与l型主板前端部连接的前肢、以及与挡板侧部连接的后肢组件;所述前肢通过连接板与l型主板连接,所述后肢组件包括后脚掌,所述后脚掌通过支架组件与挡板连接。
15、优选地,所述支架组件包括相互交叉连接的第一支架和第二支架,所述第一支架的一端与挡板连接,所述第一支架的另一端与后脚掌连接,所述第一支架上开设有卡槽,所述第二支架的一端贯穿卡槽并与第一支架连接,所述第二支架的另一端与后脚掌连接,所述第二支架上设有多个依次间隔设置的调节孔。
16、通过采用上述技术方案:后脚掌的脚掌底采用类似钉鞋的结构,以减少蹬腿时的打滑;其中,第二支架上开有多个调节孔,便于调节后脚掌的倾斜角度,以便找到后脚掌产生有效蹬力的合适倾斜角度。
17、优选地,所述仿生青蛙弹跳机器人的工作流程包括以下步骤:
18、步骤一、开始时,仿生青蛙弹跳机器人在地面上为斜向上方向,此时小电机在arduino板的控制下通电带动齿轮对转动,由齿轮对带动丝杆旋转,此时滑块往左运动推动挡块压缩导向柱上的四根第一弹簧,仿生青蛙弹跳机器人开始蓄能;
19、步骤二、当滑块推动挡块至左端的复位弹扣时,挡块上的滑动杆顺着复位弹扣的第一倾斜面滑动,使得挡块向上移动压缩复位弹簧;
20、步骤三、当挡块与滑块已经不再接触时,使得挡块不受滑块的向左约束,此时挡块由于强烈压缩着第一弹簧,而向左的约束瞬间消失,第一弹簧立即撑开挡块,即推动挡块迅速往右滑动;此时仿生青蛙弹跳机器人开始释放弹性势能,仿生青蛙弹跳机器人在四根第一弹簧弹力的作用下,依靠后脚掌产生蹬地的动作,完成弹跳动作;
21、步骤四、在完成落地后,通过arduino控制小电机进行反转,当小电机带动滑块进行反转时,滑块与挡块的第二倾斜面接触,再次压缩复位弹簧使得挡块向上运动;此时滑块复位,至此一个完整过程结束。
22、与现有技术相比,本发明具有以下有益效果:
23、1、本发明通过一级圆柱齿轮减速,再经过丝杆减速,可以用较小的小电机通过齿轮减速、丝杆减速获得较大力矩压缩弹簧以存储较多弹性势能,使其跳的更远。
24、2、本发明的弹性势能释放具有瞬时性,爆发性强等优点,利用简单的机械结构实现将弹性势能释放时将力传递给挡板等重量较大的结构利用惯性将其装置弹射,具有成本低、结构简单、自动复位等优良性能,迎合市场需求。
技术特征:
1.一种基于线性弹簧机构的仿生青蛙弹跳机器人,包括仿生青蛙弹跳机器人主体,其特征在于,所述仿生青蛙弹跳机器人主体包括机身(1)、以及与机身(1)连接的腿部结构(4)、减速机构(2)和自动复位机构(3);
2.根据权利要求1所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述减速机构(2)包括设于l型主板(103)底部的小电机(201)、安装于l型主板(103)上的丝杆(204)、以及设于前板(102)一侧的齿轮对(203);所述小电机(201)通过电机固定器(202)与l型主板(103)螺栓连接,所述小电机(201)的输出轴与齿轮对(203)连接,所述丝杆(204)的一端通过滚动轴承(206)与l型主板(103)连接,所述丝杆(204)的另一端通过滚动轴承(206)贯穿前板(102)与齿轮对(203)连接;所述丝杆(204)上套接一滑块(205),所述滑块(205)与丝杆(204)螺纹连接;所述小电机(201)分别与电源和控制模块电性连接,由控制模块控制小电机(201)驱动齿轮对(203)转动进而将动力传输至丝杆(204),由丝杆(204)带动滑块(205)做往复直线运动。
3.根据权利要求2所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述丝杆(204)的两侧设有固定杆(207),两根固定杆(207)对称设置,且两根固定杆(207)均贯穿滑块(205),两根固定杆(207)的一端均与l型主板(103)连接,两根固定杆(207)的另一端均与前板(102)连接。
4.根据权利要求2所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述滑块(205)的下端部中间位置设有第一安装孔(2051),所述第一安装孔(2051)的两侧对称设有第二安装孔(2052)。
5.根据权利要求2所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述自动复位机构(3)包括套接于导向柱(101)上的挡板(301)、以及设于前板(102)内侧的复位弹扣(303),所述挡板(301)的下端部中间位置开设有一槽口(3011),所述槽口(3011)处设有挡块(302),所述挡块(302)与滑块(205)的上端部对应设置。
6.根据权利要求5所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述挡块(302)上竖直设有一连接杆(3021),所述连接杆(3021)与挡板(301)螺母连接,所述连接杆(3021)上套接有复位弹簧(304),所述挡块(302)的一侧设有滑动杆(3022),所述滑动杆(3022)与复位弹扣(303)同侧设置;所述挡板(301)上设有用于导向柱(101)套接的第三安装孔(3012)。
7.根据权利要求6所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述复位弹扣(303)与滑动杆(3022)接触的一面为第一倾斜面(3031),所述滑动杆(3022)能够在第一倾斜面(3031)上滑动;所述挡块(302)的底部左侧设有第二倾斜面(3023)。
8.根据权利要求7所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述腿部结构(4)包括包括与l型主板(103)前端部连接的前肢(401)、以及与挡板(301)侧部连接的后肢组件;所述前肢(401)通过连接板(403)与l型主板(103)连接,所述后肢组件包括后脚掌(402),所述后脚掌(402)通过支架组件与挡板(301)连接。
9.根据权利要求8所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述支架组件包括相互交叉连接的第一支架(404)和第二支架(405),所述第一支架(404)的一端与挡板(301)连接,所述第一支架(404)的另一端与后脚掌(402)连接,所述第一支架(404)上开设有卡槽(4041),所述第二支架(405)的一端贯穿卡槽(4041)并与第一支架(404)连接,所述第二支架(405)的另一端与后脚掌(402)连接,所述第二支架(405)上设有多个依次间隔设置的调节孔(4051)。
10.根据权利要求9所述的一种基于线性弹簧机构的仿生青蛙弹跳机器人,其特征在于,所述仿生青蛙弹跳机器人的工作流程包括以下步骤:
技术总结
本发明涉及仿生青蛙弹跳机器人技术领域,尤其涉及一种基于线性弹簧机构的仿生青蛙弹跳机器人,包括仿生青蛙弹跳机器人主体,仿生青蛙弹跳机器人主体包括机身、以及与机身连接的腿部结构、减速机构和自动复位机构;机身包括L型主板、设于L型主板前端部的前板,前板通过角铝与L型主板螺栓连接,L型主板上安装有若干根导向柱,若干根导向柱为两组;每根导向柱的一端通过螺母与L型主板锁紧固定连接,每根导向柱的另一端通过螺母与前板锁紧固定连接,且每根导向柱上均套接有第一弹簧。本发明用较小的小电机通过齿轮减速、丝杆减速获得较大力矩压缩弹簧以存储较多弹性势能,采用小体积使其得跳的更远,具有成本低、结构简单、自动复位等优良性能。
技术研发人员:张磊,汤子豪,赵南生,田前,范建军,王锐,杨江义
受保护的技术使用者:南通大学
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!