一种适用于柱面活动的机器人
本发明涉及一种机器人,尤其涉及一种适用于柱面活动的机器人。
背景技术:
1、随着工业自动化和智能化水平的提高,对于各类设备和机器人的需求不断增加。在一些特殊场合,例如高空作业及零件运输、风力机塔筒检测与维护、桥梁结构检查等领域,经常需要机器人能够沿着柱形结构爬升,例如管道、电线杆、桥墩等,从而执行检测、维护、清洁等任务。
2、为了保证机器人在爬升过程中能够稳定传动,需要设计复杂的减速机构和传动系统,同时,为了确保机器人在停止运动时不会滑动或滑坡,常常需要增加额外的刹车结构,例如对柱面抱紧的机构等,如此会增加整体的重量,导致可负载的重量降低,因此,亟需一种结构更加简单并且活动稳定的机器人。
技术实现思路
1、本发明目的在于提供一种适用于柱面活动的机器人,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、本发明解决其技术问题的解决方案是:
3、一种适用于柱面活动的机器人,包括:轮组机构,包括可转动的滚轮,所述滚轮沿前后方向设置有至少两个;机架,内部围设有爬行空间,所述机架上位于所述爬行空间左右两侧的位置分别设置有所述轮组机构,两个所述轮组机构的高度互不相同,两个所述轮组机构内的所有所述滚轮均朝向所述爬行空间内。
4、该技术方案至少具有如下的有益效果:需要爬行的柱状结构穿过爬行空间,位于该柱状结构左右两侧的轮组机构通过滚轮相抵于柱状结构的柱面上,通过轮组机构内的滚轮转动,即可使得整体沿柱状结构的轴向活动,由于两个轮组机构的高度互不相同,亦即整个机器人相对柱状结构的轴线呈倾斜设置,此时可增加两个轮组机构对柱状结构的压力,从而增加滚轮与柱状结构之间的摩擦力,更好地平衡自身的重力,可稳定地将整体自锁于柱状结构上,在使用时,还可控制两个轮组机构内的滚轮具有不同的转速,从而形成差速,可进一步使得整体在柱状结构上更加稳定,如此不需要额外配置对柱状结构定位的结构,整体结构更加简单,提高了整体负载,可实现在柱面上稳定地爬行活动。
5、作为上述技术方案的进一步改进,所述机架上设置有调节机构,所述调节机构传动连接有滑架,两个所述轮组机构分别转动连接于所述滑架与所述机架上,所述调节机构可带动所述滑架在所述机架上滑动并使得一个所述轮组机构靠近或远离另一个所述轮组机构。通过调节机构带动轮组机构活动,可调整两个轮组机构之间的距离,如此可方便地根据不同外径的柱状结构而对应地适配调整,由于两个轮组机构还可在滑架与机架上转动,如此可进一步调整机架相对柱状结构倾斜的角度,从而调整与柱状结构之间的摩擦与整体自重平衡,实现自锁。
6、作为上述技术方案的进一步改进,所述调节机构包括调节电机与螺杆,所述滑架滑动连接于所述机架上,所述调节电机连接于所述机架上,所述调节电机驱动连接所述螺杆,所述螺杆螺纹配合连接于所述滑架上。当需要调整两个轮组机构之间的距离时,可通过调节电机带动螺杆转动,由于螺杆与滑架之间螺纹连接,并且滑架滑动连接于机架上,通过螺杆的正转或反转,即可带动一个轮组机构沿靠近或远离另一个轮组机构的方向活动。
7、作为上述技术方案的进一步改进,所述机架上连接有陀螺仪传感器,所述陀螺仪传感器电连接于所述调节电机。利用陀螺仪传感器可检测整体相对柱状结构的倾角变化,从而可方便通过调节电机控制滑架活动,使得整体与柱状结构之间的夹角变大或变小,进而确保在爬升过程中保持良好的稳定性,另外,还使得整体具有可应用于变径柱状结构上活动的能力,可根据柱状结构的变化而实时地调整两个轮组机构之间的距离,提高了机器人在各种工程场景中的适应性。
8、作为上述技术方案的进一步改进,所述轮组机构包括支座与爬行单元,所述爬行单元包括蜗轮蜗杆减速机与万向轴,所述支座转动连接于所述机架上,所述支座的前后两侧分别连接有连接板,两个所述连接板上分别连接有所述滚轮,所述蜗轮蜗杆减速机连接于所述支座上,所述蜗轮蜗杆减速机分别通过两个所述万向轴传动连接两个所述滚轮。利用蜗轮蜗杆减速机具有自锁的性能,可在整体需要在柱状结构上停止时对滚轮进行锁定,使用更加方便、稳定,当需要爬行时,蜗轮蜗杆减速机能提供较大的转矩,通过两个万向轴分别带动位于两个连接板上的滚轮转动,从而实现整体的上下爬行。
9、作为上述技术方案的进一步改进,所述连接板可相对所述支座转动,所述连接板的转动轴线沿上下方向设置。根据不同柱状结构的外径,可对连接板转动调整,使得滚轮的外周面更好地贴近柱状结构的柱面上,提高整体在柱状结构上活动的稳定性。
10、作为上述技术方案的进一步改进,所述支座与两个所述连接板之间分别设置有阻尼铰链,所述阻尼铰链使得所述两个所述连接板沿相互靠近的方向转动。利用阻尼链接对位于两个连接板上的滚轮提供相互转动趋近的效果,可使得滚轮的外周面更好地贴近柱状结构的柱面上,并且增大滚轮对柱面的抵压力,进一步提高整体在柱状结构上活动的稳定性,尤其适用于整体在变径的柱状结构上活动的情况。
11、作为上述技术方案的进一步改进,在同一个所述支座上,所述爬行单元沿上下方向间隔设置有多个。在同一个轮组机构中,多个上下分布的滚轮同时抵压于柱面上,可进一步提高整体在柱状结构上的稳定性。
12、作为上述技术方案的进一步改进,位于同一侧的多个所述滚轮外侧传动连接有履带。当对柱面质量保护要求较高或机器人运载质量较大时,可在多个滚轮外侧上传动连接有履带,从而增大与柱面的接触面积,并保护攀爬柱面的表面质量,提高了整体工作的灵活性和适应性。
13、作为上述技术方案的另一种改进,多个所述滚轮的外侧分别设置有橡胶层。利用橡胶增加与柱面的接触摩擦,尤其适用于较为光滑的柱面,例如风力机塔筒或路灯柱等,提高了整体工作的灵活性和适应性。
技术特征:
1.一种适用于柱面活动的机器人,其特征在于:包括:
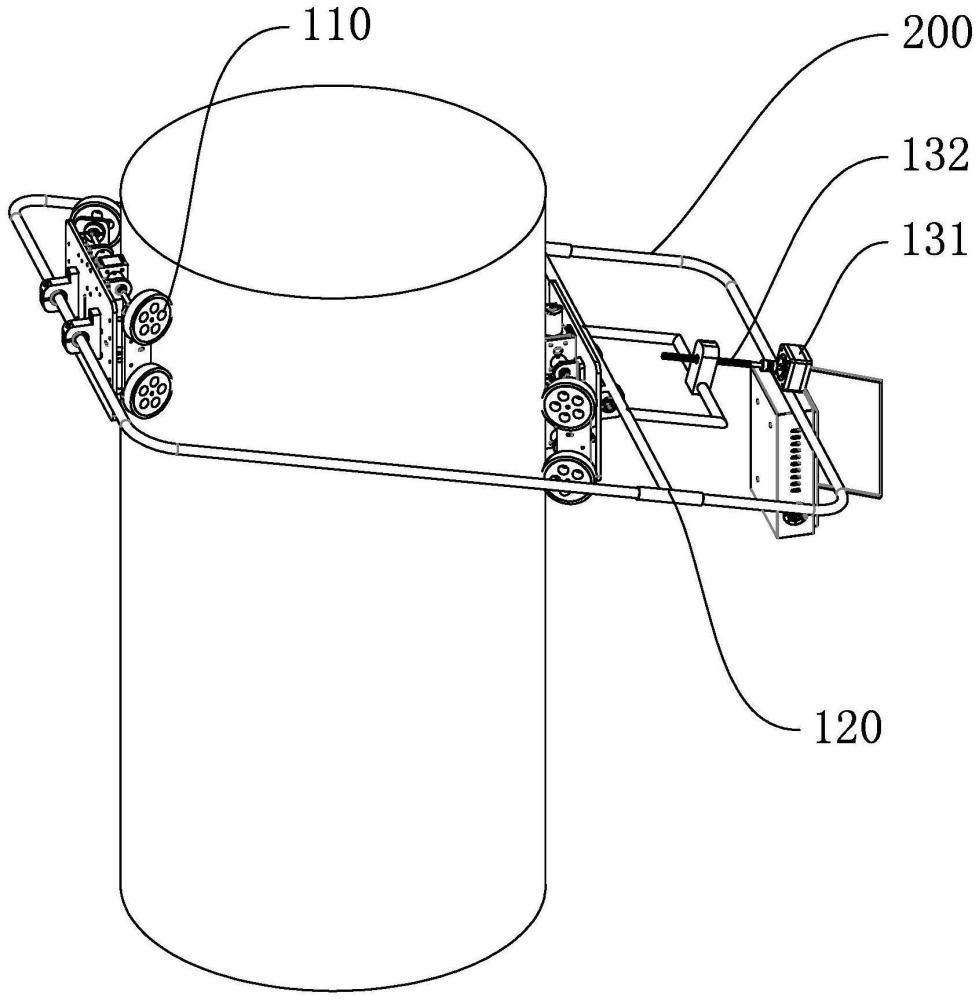
2.根据权利要求1所述的一种适用于柱面活动的机器人,其特征在于:所述机架(200)上设置有调节机构,所述调节机构传动连接有滑架(120),两个所述轮组机构分别转动连接于所述滑架(120)与所述机架(200)上,所述调节机构可带动所述滑架(120)在所述机架(200)上滑动并使得一个所述轮组机构靠近或远离另一个所述轮组机构。
3.根据权利要求2所述的一种适用于柱面活动的机器人,其特征在于:所述调节机构包括调节电机(131)与螺杆(132),所述滑架(120)滑动连接于所述机架(200)上,所述调节电机(131)连接于所述机架(200)上,所述调节电机(131)驱动连接所述螺杆(132),所述螺杆(132)螺纹配合连接于所述滑架(120)上。
4.根据权利要求3所述的一种适用于柱面活动的机器人,其特征在于:所述机架(200)上连接有陀螺仪传感器,所述陀螺仪传感器电连接于所述调节电机(131)。
5.根据权利要求1所述的一种适用于柱面活动的机器人,其特征在于:所述轮组机构包括支座(140)与爬行单元,所述爬行单元包括蜗轮蜗杆减速机(151)与万向轴(152),所述支座(140)转动连接于所述机架(200)上,所述支座(140)的前后两侧分别连接有连接板(141),两个所述连接板(141)上分别连接有所述滚轮(110),所述蜗轮蜗杆减速机(151)连接于所述支座(140)上,所述蜗轮蜗杆减速机(151)分别通过两个所述万向轴(152)传动连接两个所述滚轮(110)。
6.根据权利要求5所述的一种适用于柱面活动的机器人,其特征在于:所述连接板(141)可相对所述支座(140)转动,所述连接板(141)的转动轴线沿上下方向设置。
7.根据权利要求6所述的一种适用于柱面活动的机器人,其特征在于:所述支座(140)与两个所述连接板(141)之间分别设置有阻尼铰链(142),所述阻尼铰链(142)使得所述两个所述连接板(141)沿相互靠近的方向转动。
8.根据权利要求5所述的一种适用于柱面活动的机器人,其特征在于:在同一个所述支座(140)上,所述爬行单元沿上下方向间隔设置有多个。
9.根据权利要求8所述的一种适用于柱面活动的机器人,其特征在于:位于同一侧的多个所述滚轮(110)外侧传动连接有履带。
10.根据权利要求1所述的一种适用于柱面活动的机器人,其特征在于:多个所述滚轮(110)的外侧分别设置有橡胶层。
技术总结
本发明公开了一种适用于柱面活动的机器人,包括:轮组机构,包括可转动的滚轮,所述滚轮沿前后方向设置有至少两个;机架,内部围设有爬行空间,所述机架上位于所述爬行空间左右两侧的位置分别设置有所述轮组机构,两个所述轮组机构的高度互不相同,两个所述轮组机构内的所有所述滚轮均朝向所述爬行空间内,本发明不需要额外配置对柱状结构定位的结构,整体结构更加简单,提高了整体负载,可实现在柱面上稳定地爬行活动。
技术研发人员:张兴伟,陈剑桥,麦卓锐,刘兴,唐浩,丁嘉懿,曹宇航
受保护的技术使用者:汕头大学
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!