一种行走装置的制作方法
本发明涉及机器人,特别涉及一种行走装置。
背景技术:
1、金属储存罐通常需要进行罐壁的探伤和清洗,现有的清洗方式多采用人工进行清洗,这种清洗方式存在效率低、需要耗费较多人力的问题。为此,现有技术中提出了一种用于探伤和清洗金属储存罐罐壁的行走装置,该行走装置可在罐壁上攀爬行走,包括移动框架、外腿、内腿,移动框架呈矩形,移动框架两对称侧面对称安装若干条外腿,另两侧面对称安装若干条内腿,外腿包括外腿框架和置于外腿框架内的伸缩腿,内腿包括内腿框架和置于内腿框架内的伸缩腿,外腿和内腿底部安装吸盘;外腿的伸缩腿与移动框架连接,移动框架随外腿的伸缩腿的升降而升降,内腿框架与移动框架刚性连接,内腿框架随移动框架的升降而升降;外腿框架通过导轨安装在移动框架上,移动框架上安装横向进给电机,横向进给电机驱动横向进给丝杠;内腿和外腿均具有纵向进给电机,纵向进给电机驱动纵向进给丝杠。这种行走装置可实现行走装置沿特定方向的前进和后退,但无转向调整功能,因此,在用于金属储存罐罐壁的探伤和清洗时,不能全面的进行探伤和清洗,探伤和清洗效果差。
2、因此,需要提供一种行走装置,以在用于金属储存罐罐壁的探伤和清洗时,能全面的进行探伤和清洗,改善探伤和清洗效果。
技术实现思路
1、本发明的目的在于提供一种行走装置,以解决现有的行走装置探伤和清洗效果差的问题。
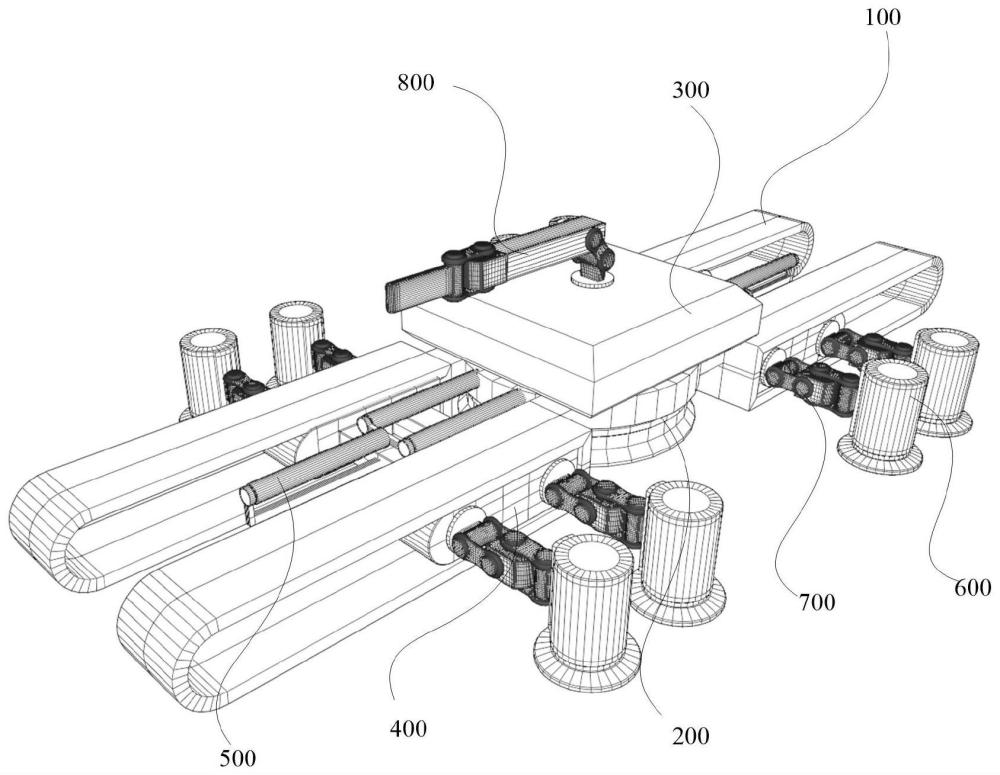
2、为解决上述技术问题,本发明提供一种行走装置,包括:主体框架;与所述主体框架转动连接且可相对所述主体框架沿z轴移动的主吸附机构;设置在所述主体框架上且用于驱动所述主体框架饶z轴旋转的主体机构;与所述主体框架滑动连接的支腿框架;设置在所述主体框架上且可驱动所述支腿框架相对所述主体框架沿y轴滑动的移动驱动机构;以及,安装于所述支腿框架上且可相对所述支腿框架沿垂直于吸附面的方向移动的支腿吸附机构。
3、可选的,所述主体框架包括中心座和导向框,所述导向框设置在所述中心座上,所述主吸附机构滑动设置于中心座上且两者之间可转动连接,所述主吸附机构的滑动方向为z轴方向且转动轴线为z轴;所述导向框具有沿y轴方向延伸的滑槽,所述支腿框架沿x轴方向穿过滑槽且所述支腿框架位于滑槽内的部分与滑槽内壁滑动接触,所述支腿框架的滑动方向为y轴方向。
4、可选的,所述导向框的数量为两组,每组导向框包括至少一个导向框,两组所述导向框设置在所述中心座的两侧且依次沿y轴设置。
5、可选的,所述支腿框架的数量为两组,所述移动驱动机构的数量为两组,所述支腿吸附机构的数量为两组,两组所述支腿框架设置在所述主体吸附机构的两侧且依次沿y向设置,两组所述移动驱动机构设置在所述主体吸附机构的两侧且依次沿y向设置,两组所述支腿吸附机构设置在所述主体吸附机构的两侧且依次沿y向设置。
6、可选的,每组支腿吸附机构包括多个所述支腿吸附机构,每组支腿吸附机构分成两部分,且两部分所述支腿吸附机构关于y向对称设置在所述支腿框架的两侧。
7、可选的,所述移动驱动机构为液压杆,所述液压杆的缸体与所述主体框架连接,所述液压杆的活塞杆与所述支腿框架连接。
8、可选的,所述支腿吸附机构,包括滑块、丝杠、驱动电机、支腿吸附支架,所述驱动电机固定在所述支腿吸附支架上,所述丝杠设置在所述支腿吸附支架上,所述丝杠与所述驱动电机的输出端连接,所述滑块与所述支腿框架连接。
9、可选的,还包括连接所述支腿框架和所述支腿吸附机构的支腿连接结构。
10、可选的,所述支腿连接结构包括第一关节、连接块和第二关节,所述第一关节与所述支腿框架绕第一方向转动连接,所述第一关节与所述连接块绕第一方向转动连接,所述连接块与所述第二关节绕第二方向转动连接,所述第二关节与所述支腿吸附机构绕第二方向转动连接。
11、可选的,还包括用于安装清洗或者探伤装置的机械臂,所述机械臂设置在所述主体机构上。
12、本发明提供的一种行走装置,具有以下有益效果:
13、由于所述主吸附机构设置在所述主体框架上且可相对所述主体框架沿z轴移动,所述支腿框架与所述主体框架滑动连接,所述移动驱动机构设置在所述主体框架上用于驱动所述支腿框架相对所述主体框架沿y轴滑动,所述支腿吸附机构可相对所述支腿框架沿垂直于吸附面的方向移动,因此可通过所述主吸附机构、所述移动驱动机构、所述主体框架和所述支腿吸附机构的协同实现行走机构的直线行走,具体的,当主吸附机构吸附在罐壁上时,所述支腿吸附机构可相对所述支腿框架上升从罐壁上抬起时,所述移动驱动机构可驱动所述支腿框架带动所述支腿吸附机构前后移动,例如,向前移动后,所述支腿吸附机构可相对所述支腿框架下降吸附在罐壁上,之后,主吸附机构从罐壁上抬起,然后,移动驱动机构可驱动所述主吸附机构和所述主体框架相对所述支腿框架前移,之后,主吸附机构吸附在罐壁上,然后支腿吸附机构再从罐壁上抬起,如此循环即可实现行走机构的前进运动,同样的,行走机构也可以实现向后运动;由于所述主体机构设置在所述主体框架上且用于驱动所述主体框架饶z轴旋转,所述主吸附机构与所述主体框架转动连接,因此,当主吸附机构吸附在罐壁上,且支腿吸附机构再从罐壁上抬起时,通过所述主体机构可驱动所述主体框架相对所述主吸附机构旋转,由于所述支腿框架与所述主体框架滑动连接,移动驱动机构设置在所述主体框架上,以及,可支腿吸附机构相对所述支腿框架沿垂直于吸附面的方向移动,因此在主体框架旋转时可带动支腿框架、移动驱动机构和支腿吸附机构旋转,从而实现行走机构的转向;由于行走机构即可以直行又可以转向,因此,可全方位的对罐体进行探伤和清洗,如此可改善罐体的探伤和清洗效果。
技术特征:
1.一种行走装置,其特征在于,包括:
2.如权利要求1所述的行走装置,其特征在于,所述主体框架包括中心座和导向框,所述导向框设置在所述中心座上,所述主吸附机构滑动设置于中心座上且两者之间可转动连接,所述主吸附机构的滑动方向为z轴方向且转动轴线为z轴;所述导向框具有沿y轴方向延伸的滑槽,所述支腿框架沿x轴方向穿过滑槽且所述支腿框架位于滑槽内的部分与滑槽内壁滑动接触,所述支腿框架的滑动方向为y轴方向。
3.如权利要求2所述的行走装置,其特征在于,所述导向框的数量为两组,每组导向框包括至少一个导向框,两组所述导向框设置在所述中心座的两侧且依次沿y轴设置。
4.如权利要求1所述的行走装置,其特征在于,所述支腿框架的数量为两组,所述移动驱动机构的数量为两组,所述支腿吸附机构的数量为两组,两组所述支腿框架设置在所述主体吸附机构的两侧且依次沿y向设置,两组所述移动驱动机构设置在所述主体吸附机构的两侧且依次沿y向设置,两组所述支腿吸附机构设置在所述主体吸附机构的两侧且依次沿y向设置。
5.如权利要求4所述的行走装置,其特征在于,每组支腿吸附机构包括多个所述支腿吸附机构,每组支腿吸附机构分成两部分,且两部分所述支腿吸附机构关于y向对称设置在所述支腿框架的两侧。
6.如权利要求1所述的行走装置,其特征在于,所述移动驱动机构为液压杆,所述液压杆的缸体与所述主体框架连接,所述液压杆的活塞杆与所述支腿框架连接。
7.如权利要求1所述的行走装置,其特征在于,所述支腿吸附机构,包括滑块、丝杠、驱动电机、支腿吸附支架,所述驱动电机固定在所述支腿吸附支架上,所述丝杠设置在所述支腿吸附支架上,所述丝杠与所述驱动电机的输出端连接,所述滑块与所述支腿框架连接。
8.如权利要求1所述的行走装置,其特征在于,还包括连接所述支腿框架和所述支腿吸附机构的支腿连接结构。
9.如权利要求8所述的行走装置,其特征在于,所述支腿连接结构包括第一关节、连接块和第二关节,所述第一关节与所述支腿框架绕第一方向转动连接,所述第一关节与所述连接块绕第一方向转动连接,所述连接块与所述第二关节绕第二方向转动连接,所述第二关节与所述支腿吸附机构绕第二方向转动连接。
10.如权利要求1所述的行走装置,其特征在于,还包括用于安装清洗或者探伤装置的机械臂,所述机械臂设置在所述主体机构上。
技术总结
本发明提供一种行走装置,包括:主体框架;与所述主体框架转动连接且可相对所述主体框架沿Z轴移动的主吸附机构;设置在所述主体框架上且用于驱动所述主体框架饶Z轴旋转的主体机构;与所述主体框架滑动连接的支腿框架;设置在所述主体框架上且可用于驱动所述支腿框架相对所述主体框架沿Y轴滑动的移动驱动机构;以及,安装于所述支腿框架上且可相对所述支腿框架沿垂直于吸附面的方向移动的支腿吸附机构。本发明可以在用于金属储存罐罐壁的探伤和清洗时,能全面的进行探伤和清洗,改善探伤和清洗效果。
技术研发人员:许芫铭,王德鑫,陶盛元,张鑫,杨林,刘涛,周春林,汪海涛,李林,吴光海
受保护的技术使用者:中建三局第三建设工程有限责任公司
技术研发日:
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!