一种基于电动转向的转向起动阻力补偿控制系统的制作方法
本发明属于汽车电动转向系统控制,具体涉及一种基于电动转向的转向起动阻力补偿控制系统。
背景技术:
1、用户对于汽车行驶安全性的重视程度越来越高,特别是对汽车转向的安全性尤为重视。驾驶员控制转向操纵装置,经过转向传动装置的运动传递,推动转向车轮的左右转动,最终实现汽车的转向功能。转向系统内部机械传动结构复杂,存在较多的机械啮合构件,这就导致转向运动初期存在较大的转向静摩擦力。转向静摩擦力的存在,会引起转向操纵时转向起动阻力偏大、转向手感不平顺,产生非心理预期的手力突变。受到转向零部件生产装配一致性的影响,不同汽车的转向摩擦力的大小会不一样。受到润滑脂在不同温度下的粘滞特性的影响,同一汽车在不同温度下的转向摩擦力也不一样。不同程度的转向摩擦力产生大小不同的转向起动阻力,这对于电动转向系统的手感控制提出了严峻挑战。
2、对于解决摩擦力引起的转向起动阻力问题,有的产品通过监控某个参数超出阈值时施加特定的助力扭矩补偿,以达到消除转向起动阻力的目的。但是这种方案存在两个弊端:其一是特定的助力扭矩补偿不能适应大小不同的转向起动阻力,导致补偿过大或者补偿不足;其二是在某些特定工况(如通过匝道)助力扭矩补偿会误介入,引起转向力瞬间发空。
3、综上所述,通过对电动转向系统设定合理的控制方法,针对不同转向起动阻力补偿不同的助力扭矩,能够规避特殊工况时扭矩补偿误介入引起的手感异常,这是本领域一直亟待解决的问题。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明提出一种基于电动转向的转向起动阻力补偿控制系统,用来解决用户进行转向操纵初期摩擦力带来的手力突变,以及转向手感不平顺问题。本发明先计算不同车速下转向操纵初期的起动阻力,在此基础上对不同方向盘转角时的起动阻力进行加权、计算,获得补偿力矩,补偿力矩和电动转向的基本助力叠加输出,从而帮助驾驶员减小转向初期的摩擦阻力,消除非心理预期的手力突变,提升整车的主动安全性能,提升用户的驾驶体验。
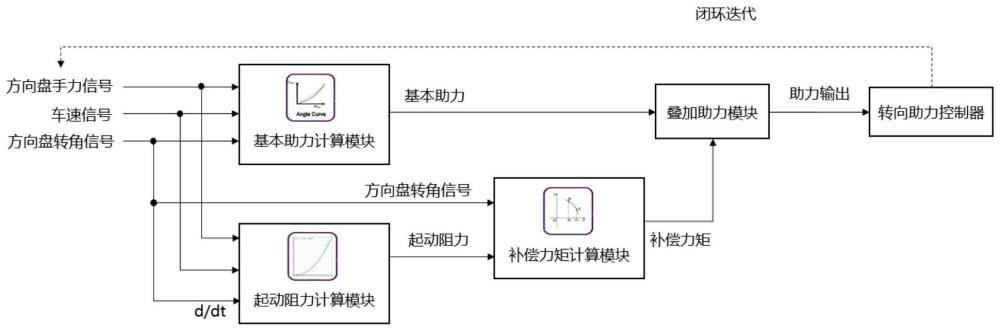
2、一种基于电动转向的转向起动阻力补偿控制系统,包括基本助力计算模块、整车控制器、起动阻力计算模块、补偿力矩计算模块和叠加助力模块,其中整车控制器实时监控整车的方向盘转角信号、方向盘手力信号和车速信号,并将方向盘转角信号、方向盘手力信号和和车速信号传输至基本助力计算模块和起动阻力计算模块;所述基本助力计算模块用于进行转向基本助力ta的计算,所述起动阻力计算模块用于进行驾驶员转向初期转向起动阻力的计算,所述补偿力矩计算模块用于转向补偿力矩的计算,所述叠加助力模块用于助力输出的计算。
3、所述基本助力计算模块根据整车的方向盘转角信号、方向盘手力信号和车速信号进行转向基本助力ta的计算,并将转向基本助力ta传输至叠加助力模块;
4、所述起动阻力计算模块能够接收整车控制器传输的方向盘转速信号和方向盘手力信号,并按下式计算驾驶员转向初期的转向起动阻力tf,并将转向起动阻力tf传输至起动阻力计算模块:
5、tf=k1·th
6、其中th为基础起动阻力,起动阻力计算模块捕获方向盘转速约为零时的转向盘手力信号值作为基础起动阻力th,k1为不同车速时的转向起动阻力系数;
7、所述补偿力矩计算模块接收起动阻力计算模块传输的转向起动阻力tf,并按下式计算得到转向补偿力矩tb,并将转向补偿力矩tb传输至叠加助力模块;
8、tb=k2·tf
9、其中k2为方向盘角度系数;
10、所述叠加助力模块按下式计算助力输出tout,并将助力输出tout传输至转向控制器:
11、tout=a·ta+b·tb
12、其中a和b分别是转向基本助力ta和转向补偿力矩tb的加权系数,用来分配转向基本助力ta和转向补偿力矩tb的占比,其中a+b=100%;
13、转向助力控制器通过助力输出tout,实现转向启动阻力的补偿,方向盘手力实时闭环迭代更新,新的方向盘手力信号再次用于基本助力计算模块中对于基础助力的计算。
14、所述起动阻力计算模块捕获方向盘转速约为零,是通过设定方向盘转速阈值的方式实现,即:当方向盘转速小于设定阈值时,把当前的方向盘手力信号值作为th,方向盘转速阈值设定为3°/s。
15、所述起动阻力计算模块中的转向起动阻力系数k1具体为:
16、当车速为40kph时,转向起动阻力系数k1取值为40%,当车速为100kph时,转向起动阻力系数k1取值为100%,当车速处于40kph~100kph范围内时,按插值法确定k1取值。
17、所述补偿力矩计算模块中方向盘角度系数k2具体为:
18、当方向盘转角为0deg时,方向盘角度系数k2取值为100%,当方向盘转角为10deg时,方向盘角度系数k2取值为0%,当方向盘转角处于0deg~10deg范围内时,按插值法确定k2取值。
19、所述补偿力矩计算模块中,若方向盘转角超过10deg时,不应有起动阻力补偿,方向盘角度系数k2为零。
20、所述叠加助力模块中转向基本助力ta的加权系数a具体为:
21、当车速为40kph或100kph时,加权系数a取值为100%,当车速为100kph时,加权系数a取值为70%,当车速处于40kph~70kph范围、70kph~100kph范围或其他车速时,按插值法确定a取值。
22、所述转向补偿力矩tb的加权系数b=100%-a。
23、本发明的有益效果:
24、本发明能够解决用户进行转向操纵初期摩擦力带来的手力突变,以及转向手感不平顺的问题,消除非心理预期的手力突变,提升整车的主动安全性能,提升用户的驾驶体验。
技术特征:
1.一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,包括基本助力计算模块、整车控制器、起动阻力计算模块、补偿力矩计算模块和叠加助力模块,其中整车控制器实时监控整车的方向盘转角信号、方向盘手力信号和车速信号,并将方向盘转角信号、方向盘手力信号和和车速信号传输至基本助力计算模块和起动阻力计算模块;所述基本助力计算模块用于进行转向基本助力ta的计算,所述起动阻力计算模块用于进行驾驶员转向初期转向起动阻力的计算,所述补偿力矩计算模块用于转向补偿力矩的计算,所述叠加助力模块用于助力输出的计算。
2.根据权利要求1所属的一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,所述基本助力计算模块根据整车的方向盘转角信号、方向盘手力信号和车速信号进行转向基本助力ta的计算,并将转向基本助力ta传输至叠加助力模块;
3.根据权利要求2所述的一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,所述起动阻力计算模块捕获方向盘转速约为零,是通过设定方向盘转速阈值的方式实现,即:当方向盘转速小于设定阈值时,把当前的方向盘手力信号值作为th,方向盘转速阈值设定为3°/s。
4.根据权利要求2所述的一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,所述起动阻力计算模块中的转向起动阻力系数k1具体为:
5.根据权利要求2所述的一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,所述补偿力矩计算模块中方向盘角度系数k2具体为:
6.根据权利要求5所述的一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,所述补偿力矩计算模块中,若方向盘转角超过10deg时,不应有起动阻力补偿,方向盘角度系数k2为零。
7.根据权利要求2所述的一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,所述叠加助力模块中转向基本助力ta的加权系数a具体为:
8.根据权利要求7所述的一种基于电动转向的转向起动阻力补偿控制系统,其特征在于,所述转向补偿力矩tb的加权系数b=100%-a。
技术总结
本发明属于汽车电动转向系统控制技术领域,具体涉及一种基于电动转向的转向起动阻力补偿控制系统;其中整车控制器实时监控整车的方向盘转角信号、方向盘手力信号和车速信号,并将方向盘转角信号、方向盘手力信号和和车速信号传输至基本助力计算模块和起动阻力计算模块;所述基本助力计算模块用于进行转向基本助力T<subgt;A</subgt;的计算,所述起动阻力计算模块用于进行驾驶员转向初期转向起动阻力的计算,所述补偿力矩计算模块用于转向补偿力矩的计算,所述叠加助力模块用于助力输出的计算;本发明能够将补偿力矩和电动转向的基本助力叠加输出,从而帮助驾驶员减小转向初期的摩擦阻力,消除非心理预期的手力突变,提升整车的主动安全性能,提升用户的驾驶体验。
技术研发人员:刘春盟,赵春寒,冯玉涛,张友杰,文媛媛,刘相斌,具龙锡,李先龙
受保护的技术使用者:一汽奔腾汽车股份有限公司
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!