一种用于分布式驱动车辆转向故障的容错控制方法
本发明涉及分布式驱动车辆路径跟踪及稳定性控制领域,具体是一种分布式驱动车辆转向系统故障容错控制方法。
背景技术:
1、随着时代的发展,车辆对于不同场景的需求逐渐增大,应用环境逐渐更加复杂。同时,由于算力水平的不断提升,以及需求的提出,智能化这一概念也逐步普及。智能车辆的转向控制能力与路径跟踪控制有着密切的关系。现代车辆转向系统的电子化和智能化发展为引入容错控制提供了技术基础,但也带来了更多的故障可能性。此外,法规标准的要求促使车辆制造商在设计和生产车辆时必须考虑容错控制,以满足严格的安全要求。最后,技术进步推动了车辆转向系统容错控制研究的发展,包括电子技术、传感器技术和控制算法的不断提升,为解决故障和异常情况提供了更多可能性和解决方案。
技术实现思路
1、本发明为克服现有技术存在的不足之处,提出一种用于分布式驱动车辆在转向系统出现故障的容错控制方法,以期能对转向系统故障进行估计和分类,并对于不同类型的故障形式,采用不同的容错控制策略,以保证在转向系统故障后仍能够精确和稳定的进行路径跟踪。
2、为实现上述目的,本发明提供如下技术方案:
3、本发明一种用于分布式驱动车辆转向系统故障的容错控制方法的特点在于,是按以下步骤进行:
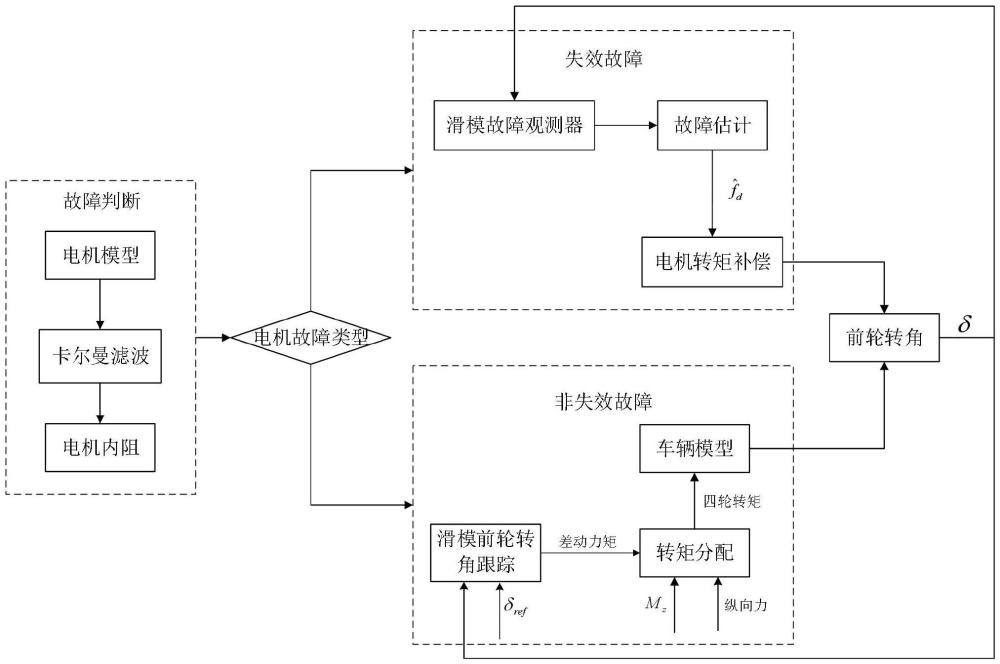
4、步骤1、建立转向电机数学模型,并通过卡尔曼滤波的方式对转向电机的内阻进行实时估计,以判断转向电机是否出现故障,若故障,则执行步骤2,否则,继续进行下一时刻的估计;
5、步骤2、通过电机转矩信号的极大似然比值对转向电机的故障进行分类,从而将转向电机的故障分为非失效故障和失效故障;
6、步骤3、对于非失效故障,设计滑模观测器对电机转矩的故障值进行估计,得到故障估计值,从而根据估计故障值,利用模糊pid控制对电机转矩进行补偿,以实现电机转矩的容错控制;
7、对于失效故障,设计滑模控制律,用于计算出满足前轮转角需求的差动力矩,从而根据所述差动力矩,利用混合惩罚函数方法对前轮纵向力进行分配,以满足前轮转角的需求。
8、本发明所述的一种用于分布式驱动车辆转向系统故障的容错控制方法的特点也在于,所述步骤1中是按如下步骤判断电机是否出现故障判断:
9、步骤1.1、通过电压平衡方程和转矩平衡方程建立转向电机的数学模型;
10、步骤1.2、设计卡尔曼滤波观测器,用于对正常工作时转向电机的内阻进行估计,从而得到正常工作时转向电机的内阻估计值,并作为参考值r;
11、步骤1.3、在转向系统工作时,对转向电机的内阻进行实时估计,得到实时估计值从而利用式(8)得到转向电机的实时残差r:
12、
13、步骤1.4、将实时残差r与设定的阈值j进行比较,当实时残差r大于阈值j时,表示转向电机出现故障,否则,表示转向电机正常工作。
14、所述步骤2是按如下步骤对故障进行分类:
15、步骤2.1、利用式(10)构建电机转矩信号的极大似然比l(i):
16、
17、式(3)中,i为转向电机的转矩信号,σ为前n个采样点下的转向电机转矩信号的方差;
18、步骤2.2、若l(i)>tr时,则表示转向电机是非失效故障,否则,表示转向电机是全失效故障,其中,tr为χ2分布值。
19、所述步骤3中的滑模观测器是按如下步骤进行设计:
20、步骤3.1a、利用式(12)建立转向系统故障模型:
21、
22、式(12)中,x表示状态变量,且δf表示前轮转角,表示前轮转角变化率,t表示矩阵转置;u表示控制变量,且u=tm,tm表示转向电机转矩,d表示扰动量,且d=τz,τz表示轮胎回正力矩,y为输出变量,且a、b、c、d为四个系数矩阵,且c=[0 1],jeq为转向系统等效转动惯量,ceq为转向系统等效阻尼,keq为转向系统等效刚度,ks为转向系统传动比;
23、步骤3.2a、利用式(13)设计滑模观测器:
24、
25、式(13)中,表示x的估计值,表示y的估计值,gm∈r2×1,gn∈r2×1为两个待设计的滑模观测器增益,v为不连续滑模切换项。
26、所述步骤3中的滑模控制律是按如下步骤进行设计:
27、步骤3.1b、利用式(37)建立转向电机完全失效由差动转向驱动转向的转向系统模型:
28、
29、式(37)中,表示前轮转角速度变化率,md表示差动力矩;
30、步骤3.2b、利用式(43)设计滑模控制律:
31、
32、式(43)中,s表示滑模切换函数,c表示滑模切换函数系数,为正整数,k1,k2表示指数趋近率的两个系数,均为正整数;sat表示连续饱和函数。
33、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述容错控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
34、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行权所述容错控制方法的步骤。
35、与现有技术相比,本发明的有益效果是:
36、1、本发明首先是对转向系统是否存在故障进行判断,同时还对转向系统的故障进行了分类,对不同类型的故障采用不同的容错控制方法,从而可以达到更好的容错控制效果。
37、2、本发明建立了考虑转向系统非失效故障的转向系统模型,通过滑模观测器对转向系统存在的故障进行了精确的估计,转向电机输出的扭矩对故障值进行补偿,达到了容错控制效果。
38、3、本发明建立转向电机完全失效后由差动力矩驱动转向的转向模型,通过滑模控制律计算出需求差动力矩,通过混合惩罚函数方法对四轮纵向力进行优化分配,满足了差动力矩要求,达到了容错控制效果。
技术特征:
1.一种用于分布式驱动车辆转向系统故障的容错控制方法,其特征在于,是按以下步骤进行:
2.根据权利要求1所述的一种用于分布式驱动车辆转向系统故障的容错控制方法,其特征在于,所述步骤1中是按如下步骤判断电机是否出现故障判断:
3.根据权利要求2所述的一种用于分布式驱动车辆转向系统故障的容错控制方法,其特征在于,所述步骤2是按如下步骤对故障进行分类:
4.根据权利要求3所述的一种用于分布式驱动车辆转向系统故障的容错控制方法,其特征在于,所述步骤3中的滑模观测器是按如下步骤进行设计:
5.根据权利要求4所述的一种用于分布式驱动车辆转向系统故障的容错控制方法,其特征在于,所述步骤3中的滑模控制律是按如下步骤进行设计:
6.一种电子设备,包括存储器以及处理器,其特征在于,所述存储器用于存储支持处理器执行权利要求1-5中任一所述容错控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
7.一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器运行时执行权利要求1-5中任一所述容错控制方法的步骤。
技术总结
本发明公布了一种用于分布式驱动车辆转向系统故障的容错控制方法,包括:建立转向电机模型,通过对转向电机内阻进行实时估计判断转向系统是否出现故障,通过电机转矩信号的极大似然比判断转向电机发生失效故障还是非失效故障。对于不同的故障采用不同的容错控制方法;当转向系统为非失效故障,通过建立转向系统模型对故障进行估计和补偿的方式进行容错控制;当转向系统为失效故障,则通过左、右前轮输出不同纵向力,即差动转向的方式进行容错控制。
技术研发人员:夏光,吴见阳,钱峰,潘永成,吴士标,姜涛,周大洋,张晨昊,李涛,魏志祥,施永祥,汪韶杰
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!