一种辅助制动助力转向控制方法、系统及车辆与流程
本发明属于车辆,具体涉及一种辅助制动助力转向控制方法、系统及车辆。
背景技术:
1、现有汽车转向系统有以下三种组合式转向控制方法:
2、参见图1,为单一助力转向控制系统,该系统为机械转向控制系统ⅰ与(液压或电动)助力控制系统ⅱ通过步骤2的组合形式,其中的”电动”通常是高压电动,机械转向控制系统ⅰ也是主动转向控制系统。
3、参见图2,为单备份转向控制系统,该系统为机械转向控制系统ⅰ、(液压或电动)助力控制系统ⅱ、电动助力控制系统ⅲ三部分的组合形式,机械转向控制系统ⅰ与(液压或电动)助力控制系统ⅱ通过步骤2组合,机械转向控制系统ⅰ与电动助力控制系统ⅱ通过步骤1组合, 电动助力控制系统ⅲ为低压控制系统。电动助力控制系统ⅲ中步骤4的条件a为车速、转向操纵装置的操纵力矩、转向操纵装置的操纵时间、转向操纵装置的角速度、转向操纵装置的转角、液压系统的压力、流量、电机转速、电机扭矩、电机电压及电流等的部分或全部参数的阈值。机械转向控制系统ⅰ也是主动转向控制系统。
4、参见图3,为能够实现人工与智能驾驶切换的车辆转向系统,图示显示的是智能驾驶状态转向控制系统,图示中的虚线控制流在人工控制模式下才起作用,在智能驾驶状态不起作用。智能驾驶状态的组合形式为,机械转向控制系统ⅳ、(液压或电动)助力控制系统ⅱ、智能转向电控系统ⅴ三部分的组合形式。其中机械转向控制系统ⅳ与(液压或电动)助力控制系统ⅱ通过步骤6组合,机械转向控制系统ⅳ与智能转向电控系统ⅴ通过步骤5组合。在智能驾驶状态下,智能转向电控系统ⅴ是主动转向控制系统。
5、现有的以上三种组合式转向控制方法存在以下不足:
6、对于图1所示的单一助力转向控制系统,当助力控制系统ⅱ失效时,转向操纵力会增大很多,有时会超出驾驶员的控制力,对行车安全造成不利影响。
7、对于图2所示的单备份转向控制系统,备份的电动助力控制系统ⅲ通常作为助力控制系统ⅱ的冗余设计,当助力控制系统ⅱ失效时,备份的电动助力控制系统ⅲ会有条件地介入,使得转向操纵力不会有太大增加,保证了行车安全。但由于这种单备份转向控制系统中的备份电动助力控制系统ⅲ的供电是由低压蓄电池承担的,电量有限,助力电机也不能长时间工作,所以不能保证故障车辆在长途行驶中到达方便维修的地点停车维修。
8、对于图3所示的能够实现人工与智能驾驶切换的车辆转向系统,在智能驾驶状态下,当助力控制系统ⅱ失效时,整个转向控制系统没有备份的其它助力控制系统的介入,使得转向控制力大大增加,对智能驾驶状态下的行车安全产生极大不利影响。
技术实现思路
1、本发明的目的是提供一种辅助制动助力转向控制方法、系统及车辆。本发明的技术方案是:该辅助制动助力转向控制系统在车辆有助力转向需求时,可以在控制器的控制下对车辆一侧车轮的制动力实施制动控制,使左右车轮产生转速差,对车辆产生一个横摆转矩,进而对驾驶员的转向操作产生助力效果。该辅助制动助力转向控制系统可以与背景技术的三种控制系统分别形成组合,辅助制动助力转向控制系统作为背景技术的三种控制系统的冗余系统和辅助系统。当背景技术的三种控制系统中的助力系统失效,且需要助力转向时,辅助制动助力转向控制系统通过控制器判断,在满足一定条件下,及时介入助力。
2、本发明的有益效果是:本发明提供了一种辅助制动助力转向控制方法、系统及车辆,辅助制动助力转向控制系统,成本低,控制可靠。其控制过程不受蓄电池的电量影响,满足在背景技术中的转向助力系统出现故障的前提下车辆对长续航里程的需求;背景技术的单一助力转向控制系统与辅助制动助力转向控制系统组合后,相对背景技术的单一助力转向控制系统,在重量成本增加不大的情况下,可以提高车辆行驶的安全性;背景技术的单一助力转向控制系统与辅助制动助力转向控制系统组合后,相对背景技术的单备份转向控制系统,成本和重量将大大降低,且续航里程不受限制,可以保证车辆行驶到方便维修的地点;背景技术的单备份转向控制系统与辅助制动助力转向控制系统组合后,相对背景技术的单备份转向控制系统,又增加了一套冗余备份助力系统,更加保证了车辆的行驶安全,更适合于对行驶安全要求更高的车辆;背景技术的能够实现人工与智能驾驶切换的车辆转向系统与辅助制动助力转向控制系统组合后,在智能驾驶状态下,相对背景技术的智能驾驶状态转向控制系统,增加了备份的助力控制系统,当助力控制系统ⅱ失效时,辅助制动助力转向控制系统会有条件地介入助力,保证了车辆在智能驾驶状态下的行驶安全。
技术特征:
1.一种辅助制动助力转向控制方法、系统及车辆,其特征是:该辅助制动助力转向控制系统在车辆有助力转向需求时,可以在控制器的控制下对车辆一侧车轮的制动力实施制动控制,使左右车轮产生转速差,对车辆产生一个横摆转矩,进而对驾驶员或智能驾驶的转向电机的转向操作产生助力效果。
2.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动转向控制系统作为其它转向控制系统的冗余系统和辅助系统,只有当其它转向控制系统中的助力系统失效时,辅助制动转向控制系统才会有条件地介入助力。
3.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动转向控制系统介入转向助力时,控制器对一侧全部或部分车轮实施制动控制时,是在保证被实施制动的车轮不抱死的前提下进行辅助制动助力转向控制的。
4.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动助力转向控制系统介入转向助力时,由驾驶员或智能驾驶的转向电机的转向操纵力转化到转向轮的转向控制力与本发明的辅助制动助力转向控制系统对转向轮产生的作用力的共同作用,实现车辆顺利转向。
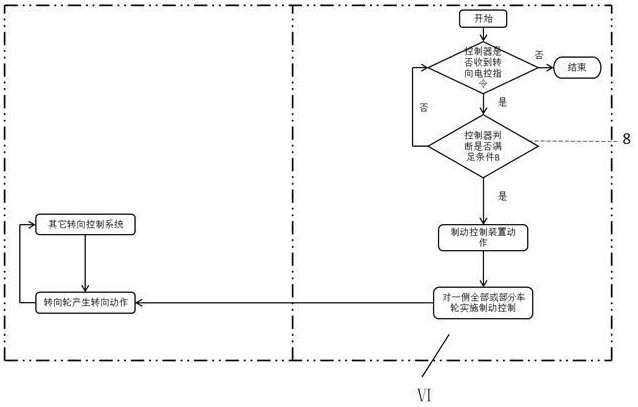
5.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动助力转向控制系统ⅵ中的步骤8所涉及的控制器可以是独立的,也可以集成在装有ebs电控制动系统车辆的ebs控制器中,或者在装有ebs电控制动系统车辆的ebs控制器基础上进行软、硬件升级来实现。
6.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动助力转向控制系统ⅵ可以与背景技术中的任一种转向控制系统,且不限于背景技术中所述转向控制系统进行组合,以满足不同车辆对转向控制系统的不同需求。
7.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动助力转向控制系统ⅵ与背景技术的单一助力转向控制系统组合后,可以实现新型的备份助力控制。
8.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动助力转向控制系统ⅵ与背景技术的单备份转向控制系统组合后,可以实现新型的双备份助力控制。
9.根据权利要求1所述的一种辅助制动助力转向控制方法、系统及车辆,其特征是:辅助制动助力转向控制系统ⅵ与背景技术的能够实现人工与智能驾驶切换的车辆转向系统组合后,可以实现在在智能驾驶状态下,实现新型的智能驾驶的备份助力控制。
技术总结
本发明提供了一种辅助制动助力转向控制方法、系统及车辆,适用于车辆技术领域。本发明的一种辅助制动助力转向控制方法、系统及车辆的辅助制动助力转向控制系统在车辆有助力转向需求时,通过步骤8判断是否满足条件B。若满足条件B,则对车辆一侧全部或部分车轮实施制动力控制,使左右车轮产生转速差,对车辆产生一个横摆转矩,辅助其它转向控制系统的主转向控制系统对转向轮产生转向动作,进而对驾驶员的转向操作产生助力转向效果。本发明的一种辅助制动助力转向控制方法、系统及车辆的辅助制动助力转向控制系统可以与背景技术中的任一种转向控制系统,且不限于背景技术中所述转向控制系统进行组合。形成不同的转向系统控制方法,以满足不同车辆对转向控制系统的不同需求。
技术研发人员:请求不公布姓名
受保护的技术使用者:韦玉梅
技术研发日:
技术公布日:2024/6/30
- 还没有人留言评论。精彩留言会获得点赞!