一种核生化环境下医疗转运机器人的制作方法
本发明涉及救援机器人,具体是一种核生化环境下医疗转运机器人。
背景技术:
1、在遭遇核生化污染事故、地震、自然灾害或其他高危状况时,环境极其恶劣,人类难以深入。因此,需要依赖机器人来执行侦察、救援、排险和排爆等高风险任务。特别是那些被核生化物质污染的区域,由于其对人类具有致命威胁,机器人的使用显得尤为关键。
2、履带机器人是这其中的佼佼者,它凭借履带底盘设计,展现出强大的牵引力、防滑性和越野性能。搭载摄像头和探测器等设备后,它能有效地代替人类在危险环境中执行任务,从而显著降低人员伤亡。
3、然而,目前的大多数履带机器人主要集中在侦察和物资运输的功能上,对于伤员的直接转移还存在一定的局限性。
技术实现思路
1、本发明提供一种核生化环境下医疗转运机器人,目的是增强机器人在救援过程中的全面性和高效性。
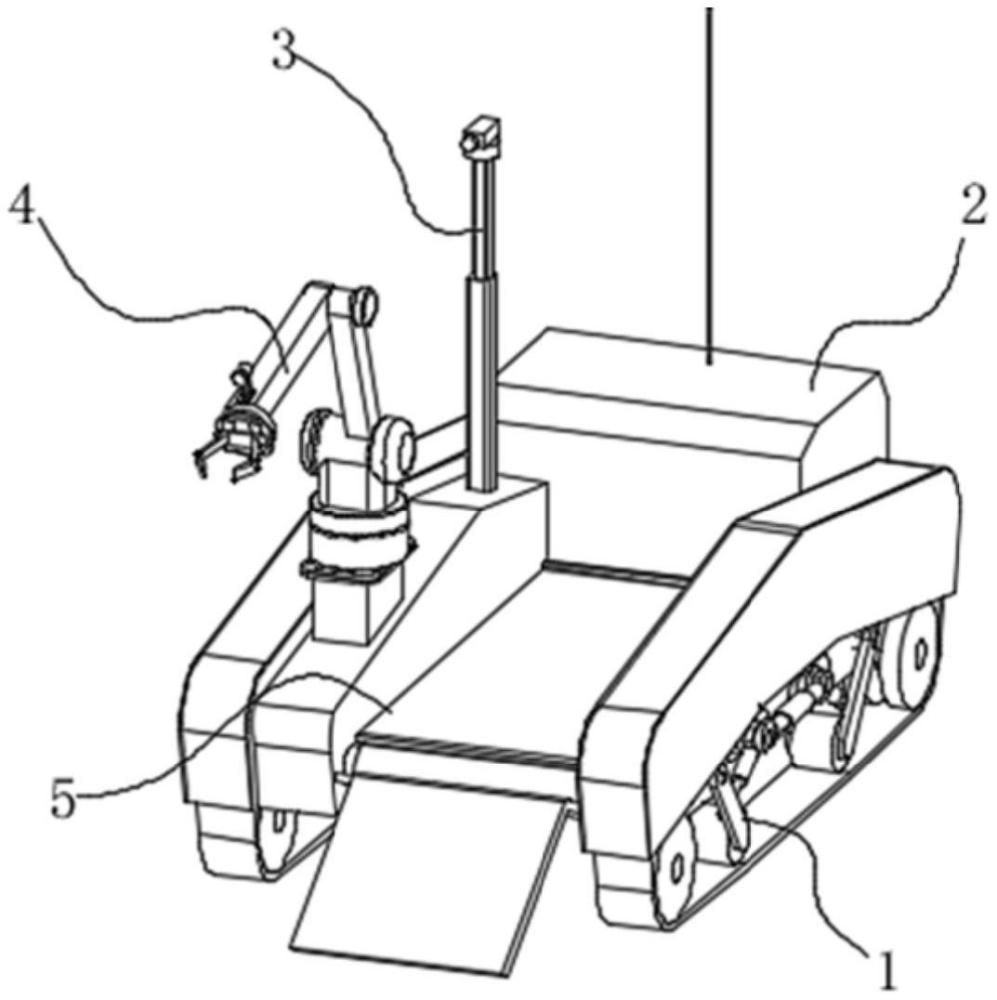
2、本发明采用如下技术方案:一种核生化环境下医疗转运机器人,包括行走底盘,行走底盘上安装有动力控制箱;所述行走底盘上还安装有视觉系统、机械臂和救援仓;所述动力控制箱控制连接所述行走底盘、视觉系统、机械臂和救援仓,动力控制箱通过无线模块连接控制中心。
3、为进一步是:所述救援仓包括回转安装在行走底盘上的主动辊和从动辊,主动辊和从动辊上安装有传动带;所述传动带上设置有气垫,气垫前端固定在传动带前部;传动带后部设置有导板,导板靠近传动带的一端通过开合转轴铰接于行走底盘上。
4、所述开合转轴、主动辊和从动辊布置在同一平面,开合转轴控制导板打开时,导板远离传动带的一端接触地面。
5、所述救援仓还包括固定在行走底盘上的底板,底板支撑在上层的所述传动带下;所述传动带的一侧设置有固定于行走底盘上的传动箱,传动箱中安装有用于带动所述主动辊的回转电机和用于带动所述开合转轴的开合电机。
6、所述行走底盘包括一对连接为一体的支撑横梁,支撑横梁上安装有减震架行走组件;
7、所述减震架行走组件包括位于支撑横梁正上方的上顶轮,上顶轮转轴上铰接有对称的前摇臂和后摇臂;所述支撑横梁上滑动安装有前后对称的前滑块和后滑块,前滑块和后滑块之间连接有中置缓冲缸;
8、所述前摇臂前部与支撑横梁前部之间通过前短连杆铰接,前摇臂后部与所述前滑块之间通过前长连杆铰接;所述后摇臂后部与支撑横梁后部之间通过后短连杆铰接,后摇臂前部与所述后滑块之间通过后长连杆铰接;
9、所述支撑横梁前部铰接有前支重杆,前支重杆下端回转安装有前支重轮,前支重杆与所述前滑块之间铰接有前置缓冲缸;所述支撑横梁后部铰接有后支重杆,后支重杆下端回转安装有后支重轮,后支重杆与所述后滑块之间铰接有后置缓冲缸;
10、所述前摇臂前端呈“t”字形,前摇臂前端靠下位置回转安装有前行走轮,前摇臂前端靠上位置回转安装有前导向轮;所述后摇臂后端呈“t”字形,后摇臂后端靠下位置回转安装有后行走轮,后摇臂后端靠上位置回转安装有后导向轮;
11、所述前支重轮、后支重轮、后行走轮、后导向轮、上顶轮、上顶轮和前导向轮上安装有履带。
12、所述支撑横梁上开设有前后对称的前滑槽和后滑槽,所述前滑块滑动安装在前滑槽中,所述后滑块滑动安装在后滑槽中。
13、所述前短连杆上端铰接点的两侧固定有对称的限位螺栓,所述前摇臂上开设有与限位螺栓配合的限位槽。
14、所述视觉系统包括伸缩杆,伸缩杆上端固定有回转盘,回转盘上安装有第一相机。
15、所述机械臂固定在底座上,机械臂的执行端固定有抓手和第二相机。
16、本发明的有益效果在于:救援仓设置有可以随着传动带的转动伸出下放的气垫,配合导板和机械臂的辅助,方便人员上到气垫上,再通过传动带的反转带动气垫和人员顺利登上救援仓,及时转移;减震架组件采用前后对称的两级减震机构,提高行走底盘中支撑横梁的减震效果,提高救援仓的稳定性,避免人员转移过程中受到二次伤害。
技术特征:
1.一种核生化环境下医疗转运机器人,包括行走底盘(1),行走底盘(1)上安装有动力控制箱(2);其特征在于:所述行走底盘(1)上还安装有视觉系统(3)、机械臂(4)和救援仓(5);所述动力控制箱(2)控制连接所述行走底盘(1)、视觉系统(3)、机械臂(4)和救援仓(5),动力控制箱(2)通过无线模块连接控制中心。
2.根据权利要求1所述的一种核生化环境下医疗转运机器人,其特征在于:所述救援仓(5)包括回转安装在行走底盘(1)上的主动辊(52)和从动辊(53),主动辊(52)和从动辊(53)上安装有传动带(54);所述传动带(54)上设置有气垫(55),气垫(55)前端固定在传动带(54)前部;传动带(54)后部设置有导板(56),导板(56)靠近传动带(54)的一端通过开合转轴(57)铰接于行走底盘(1)上。
3.根据权利要求2所述的一种核生化环境下医疗转运机器人,其特征在于:所述开合转轴(57)、主动辊(52)和从动辊(53)布置在同一平面,开合转轴(57)控制导板(56)打开时,导板(56)远离传动带(54)的一端接触地面。
4.根据权利要求2所述的一种核生化环境下医疗转运机器人,其特征在于:所述救援仓(5)还包括固定在行走底盘(1)上的底板(51),底板(51)支撑在上层的所述传动带(54)下;所述传动带(54)的一侧设置有固定于行走底盘(1)上的传动箱(58),传动箱(58)中安装有用于带动所述主动辊(52)的回转电机和用于带动所述开合转轴(57)的开合电机。
5.根据权利要求1所述的一种核生化环境下医疗转运机器人,其特征在于:所述行走底盘(1)包括一对连接为一体的支撑横梁(101),支撑横梁(101)上安装有减震架行走组件;
6.根据权利要求5所述的一种核生化环境下医疗转运机器人,其特征在于:所述支撑横梁(101)上开设有前后对称的前滑槽(1011)和后滑槽(1012),所述前滑块(105)滑动安装在前滑槽(1011)中,所述后滑块(106)滑动安装在后滑槽(1012)中。
7.根据权利要求5所述的一种核生化环境下医疗转运机器人,其特征在于:所述前短连杆(108)上端铰接点的两侧固定有对称的限位螺栓(1081),所述前摇臂(102)上开设有与限位螺栓(1081)配合的限位槽(1021)。
8.根据权利要求1所述的一种核生化环境下医疗转运机器人,其特征在于:所述视觉系统(3)包括伸缩杆(31),伸缩杆(31)上端固定有回转盘(32),回转盘(32)上安装有第一相机(33)。
9.根据权利要求1所述的一种核生化环境下医疗转运机器人,其特征在于:所述机械臂(4)固定在底座(41)上,机械臂(4)的执行端固定有抓手(42)和第二相机(43)。
技术总结
本发明公开一种核生化环境下医疗转运机器人,属于救援机器人技术领域。包括行走底盘,行走底盘上安装有动力控制箱;所述行走底盘上还安装有视觉系统、机械臂和救援仓;所述动力控制箱控制连接所述行走底盘、视觉系统、机械臂和救援仓,动力控制箱通过无线模块连接控制中心。转运机器人由控制中心远程操作,救援仓设置有可以随着传动带的转动伸出下放的气垫,配合导板和机械臂的辅助,方便人员上到气垫上,再通过传动带的反转带动气垫和人员顺利登上救援仓,增强机器人在救援过程中的全面性和高效性。
技术研发人员:郑振东
受保护的技术使用者:中国人民解放军北部战区总医院
技术研发日:
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!