运载机器人的制作方法
本申请涉及检测机器人,特别是涉及一种运载机器人。
背景技术:
1、对大型发电机,运行中的发电机承受着严酷的工作条件,不可避免的对发电机结构造成劣化和损伤,尤其是作为主要发电部件的定子和转子部分。为了防止发电机主体结构损伤带来的严重后果,必须定期对其内部关键部件进行全面检修。可以采用将机器人伸入定子和转子之间的方式对定子或者转子进行检修。
2、然而相关技术中的机器人自主调节性较低,难以适用于较为复杂的检修环境。
技术实现思路
1、基于此,有必要针对相关技术中的机器人自主调节性较低,难以适用于较为复杂的检修环境的问题,提供一种运载机器人。
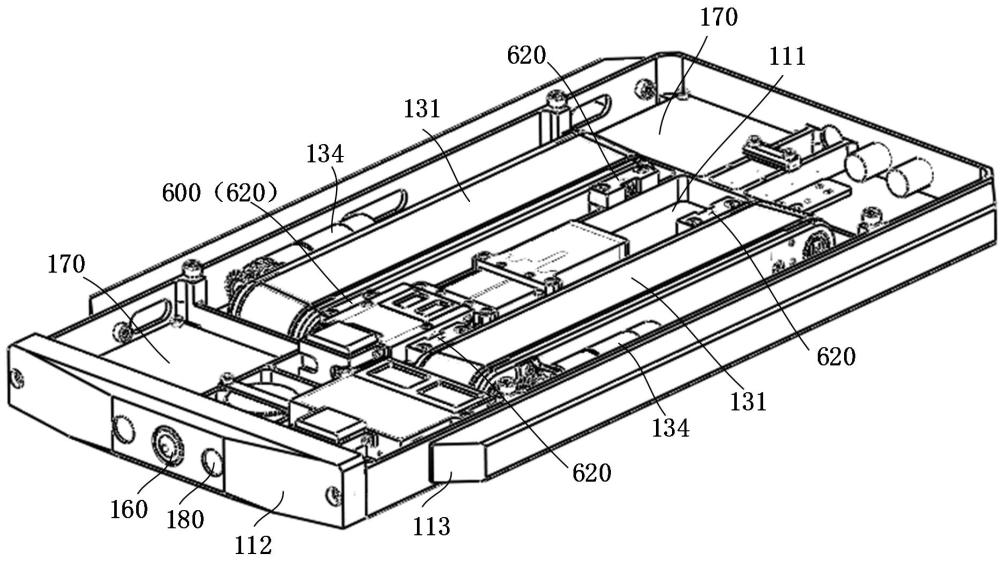
2、一种运载机器人,所述运载机器人包括:
3、运载本体,用于承载检测设备;
4、驱动组件,连接于所述运载本体,所述驱动组件用于驱动所述运载本体沿第一方向相对待检测件移动;以及
5、调整单元,分别连接于所述运载本体和所述驱动组件,所述调整单元被配置为能够使所述驱动组件和所述运载本体之间呈预设角度连接,以使所述驱动组件和所述运载本体围绕所述待检测件布设。
6、在其中一个实施例中,所述调整单元包括安装件,所述安装件设于所述运载本体和所述驱动组件二者中的其中之一上,且绕平行于所述第一方向的轴线转动地连接于所述运载本体和所述驱动组件二者中的另外之一。
7、在其中一个实施例中,所述安装件沿所述第一方向穿设有第一连接孔,且所述安装件设于所述运载本体上;
8、所述调整单元还包括设于所述驱动组件上的第一旋转销,所述第一旋转销绕平行于所述第一方向的轴线转动地设于所述第一连接孔。
9、在其中一个实施例中,所述运载本体上设有第二连接孔;
10、所述安装件设于所述驱动组件,且所述安装件上设有与所述第二连接孔相适配的第二旋转销,所述第二旋转销穿设于所述第二连接孔,以使所述安装件绕平行于第一方向的轴线转动地连接于所述运载本体。
11、在其中一个实施例中,所述调整单元包括安装块,所述安装块连接于所述运载本体和所述驱动组件之间;
12、所述安装块包括相背设置的第一安装面和第二安装面,所述第一安装面连接于所述运载本体,所述第二安装面连接于所述驱动组件;
13、所述第一安装面与所述第二安装面之间呈预设角度设置,以使所述驱动组件呈预设角度倾斜地连接于所述运载本体。
14、在其中一个实施例中,所述运载机器人包括两组所述驱动组件,两组所述驱动组件分别设于所述运载本体沿第二方向的相对两侧;
15、其中,所述第一方向和所述第二方向彼此相交。
16、在其中一个实施例中,所述运载机器人还包括自控单元,所述自控单元包括控制器和至少两个位置探测器,至少两个所述位置探测器分别设于所述运载本体沿所述第二方向的相对两侧;
17、所述控制器与所有所述驱动组件和所有所述位置探测器均电连接,所述控制器用于根据所述位置探测器所探测的位置信号,分别控制调节两组所述驱动组件的驱动功率。
18、在其中一个实施例中,所述驱动组件包括设于所述运载本体上的移动驱动件和履带轮,所述履带轮可转动地连接于所述运载本体;所述移动驱动件传动连接于所述履带轮,以用于驱动所述履带轮转动,而带动所述运载本体沿所述第一方向相对所述待检测件移动。
19、在其中一个实施例中,所述驱动组件还包括设于所述运载本体上的吸附组件,所述吸附组件包括至少一个设于所述运载本体的磁性件,所述磁性件用于与所述待检测件磁吸连接。
20、在其中一个实施例中,所述驱动组件还包括滑板;
21、所述履带轮环绕所述吸附组件外周设置,所述滑板隔设于所述磁性件和所述履带轮之间;
22、所述滑板包括平滑面,所述平滑面朝向所述履带轮设置;
23、所述滑板上设有用于显露所述磁性件的开口。
24、上述运载机器人通过调整单元调节使驱动组件和运载本体之间呈预设角度连接,使得驱动组件和运载本体围绕所述待检测件布设,以便于驱动组件和运载本体之间的连接能够适配于待检测件表面的弯曲弧度,提高了运载机器人的自主调节性,使其能够适用于较为复杂的检修环境。
技术特征:
1.一种运载机器人,其特征在于,所述运载机器人包括:
2.根据权利要求1所述的运载机器人,其特征在于,所述调整单元包括安装件,所述安装件设于所述运载本体和所述驱动组件二者中的其中之一上,且绕平行于所述第一方向的轴线转动地连接于所述运载本体和所述驱动组件二者中的另外之一。
3.根据权利要求2所述的运载机器人,其特征在于,所述安装件沿所述第一方向穿设有第一连接孔,且所述安装件设于所述运载本体上;
4.根据权利要求2所述的运载机器人,其特征在于,所述运载本体上设有第二连接孔;
5.根据权利要求1所述的运载机器人,其特征在于,所述调整单元包括安装块,所述安装块连接于所述运载本体和所述驱动组件之间;
6.根据权利要求1-5任一项所述的运载机器人,其特征在于,所述运载机器人包括两组所述驱动组件,两组所述驱动组件分别设于所述运载本体沿第二方向的相对两侧;
7.根据权利要求6所述的运载机器人,其特征在于,所述运载机器人还包括自控单元,所述自控单元包括控制器和至少两个位置探测器,至少两个所述位置探测器分别设于所述运载本体沿所述第二方向的相对两侧;
8.根据权利要求1-5任一项所述的运载机器人,其特征在于,所述驱动组件包括设于所述运载本体上的移动驱动件和履带轮,所述履带轮可转动地连接于所述运载本体;所述移动驱动件传动连接于所述履带轮,以用于驱动所述履带轮转动,而带动所述运载本体沿所述第一方向相对所述待检测件移动。
9.根据权利要求8所述的运载机器人,其特征在于,所述驱动组件还包括设于所述运载本体上的吸附组件,所述吸附组件包括至少一个设于所述运载本体的磁性件,所述磁性件用于与所述待检测件磁吸连接。
10.根据权利要求9所述的运载机器人,其特征在于,所述驱动组件还包括滑板;
技术总结
本申请涉及一种运载机器人,运载机器人包括运载本体、驱动组件和调整单元,运载本体用于承载检测设备,驱动组件连接于运载本体,驱动组件用于驱动运载本体沿第一方向相对待检测件移动,调整单元分别连接于运载本体和驱动组件,调整单元被配置为能够使驱动组件和运载本体之间呈预设角度连接,以使驱动组件和运载本体围绕待检测件布设。运载机器人通过调整单元调节使驱动组件和运载本体之间呈预设角度连接,便于驱动组件和运载本体之间的连接适配于待检测件表面的弯曲弧度,提高了运载机器人的自主调节性,能够适用于较为复杂的检修环境。
技术研发人员:王建涛,陈志波,张闰,肖鸿坤,谢宝燕,陈威,梁平华,赖章泽,王永亮,窦普,张志刚,赵建平,冯常,胡嵩,魏利峰,房志强,张伟,陈俊达,景松,马奇英,张兴隆,曹龙研
受保护的技术使用者:中广核核电运营有限公司
技术研发日:
技术公布日:2024/8/1
- 还没有人留言评论。精彩留言会获得点赞!