无人救援运输车的制作方法
本发明涉及一种用于救援运输场景作业的无人救援运输车。
背景技术:
1、随着社会的发展,智能机械设备在各个领域的应用越来越广泛。但在被救助者救援场景中,传统的救援机械不能自主救援被救助者或者运输物资,往往需要相关人员辅助,迫切地需要无人救援车来实现长距离且自主地转运被救助者或运输救援物资。
2、现有设备在平台上方所占用高度较高,导致整机重心较高,会增加车辆行驶的不稳定性;这增加了也能输过程的复杂程度与整机重量;另外现有平台在拖动担架时采用链条传动,由于链条的多边形效应,会导致整个拖动的过程存在明显的震动,降低了安全性。
技术实现思路
1、为了改善现有技术的缺陷,本发明提供一种无人救援运输车,包括:
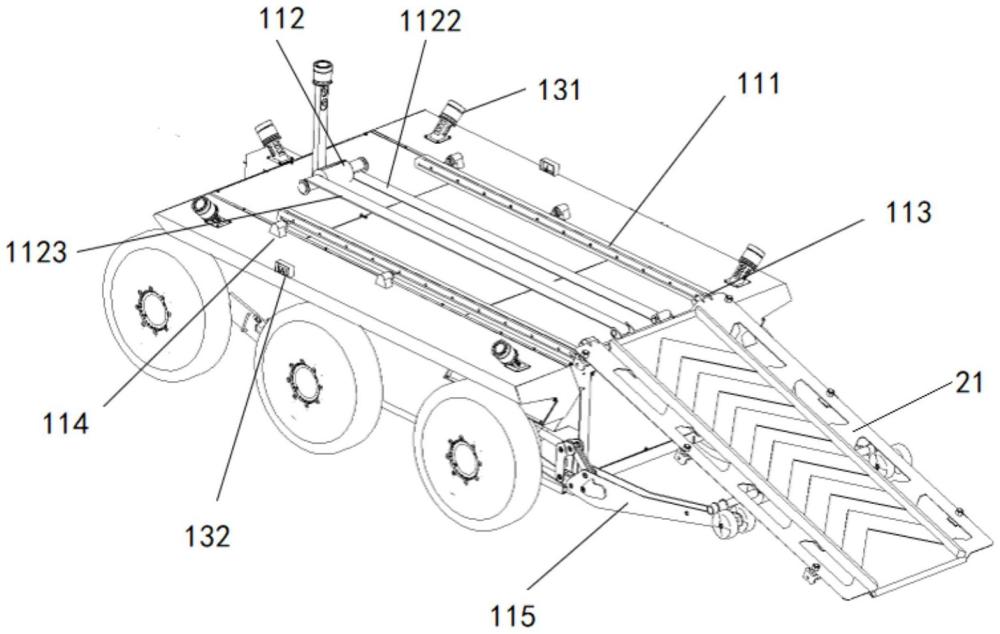
2、底盘车架,在底盘车架的顶面上设有纵向滑轨;以及
3、担架平台,沿着滑轨可滑动地布置,担架平台的头端能够滑动到底盘车架尾端并且与底盘车架尾端可枢转地铰接,以使担架平台相对于底盘车架枢转。
4、在一些实施例中,底盘车架的尾端设有钩状件,担架平台的头端设有枢转轴,枢转轴能够可分离地接合到钩状件中。
5、在一些实施例中,无人救援运输车包括:后支腿,可枢转地布置在底盘车架尾部下部,以在担架平台相对于底盘车架枢转过程中从下方保持抵靠并支撑担架平台。
6、在一些实施例中,无人救援运输车包括第一液压油缸,其一端与底盘车架相连,其另一端通过连杆机构与后支腿相连,以驱动后支腿相对于底盘车架枢转。
7、在一些实施例中,后支腿的末端安装有滚轮。
8、在一些实施例中,无人救援运输车包括:行走部件,设置在底盘车架的底部;悬挂机构,设置在行走部件和底盘车架之间,用于调节行走部件和底盘车架之间的高度。
9、在一些实施例中,悬挂机构包括:行走支腿,其一端与底盘车架可枢转地相连,其另一端与行走部件可枢转地相连;第二液压油缸,其一端与底盘车架可枢转地相连,其另一端与行走支腿可枢转地相连并且位于行走支腿的两端之间。
10、在一些实施例中,无人救援运输车包括锁紧装置,用于将担架平台锁定在滑轨上。
11、在一些实施例中,锁紧装置包括:锁紧件,设有定位销,锁紧件布置在滑轨的一侧;设置在滑轨上的第一定位孔;以及设置在担架平台上的第二定位孔;其中定位销穿过第一和第二定位孔。
12、在一些实施例中,在担架平台设有滑块,滑块可滑动地布置在滑轨中,第二定位孔设置在滑块上。
13、在一些实施例中,担架平台设有能够自动输送的传送带。
14、在一些实施例中,无人救援运输车包括:电机,设置在底盘车架上;第一传动带,一端与电机转动地相连,另一端绕过定滑轮与担架平台相连,以牵引担架平台朝向底盘车架的尾端移动;以及第二传动带,一端与电机转动地相连,另一端与担架平台相连,以牵引担架平台朝向底盘车架的头端移动。
15、在一些实施例中,电机包括:第一电机和第二电机,第一传动带的一端与第一电机转动地相连,第二传动带的一端与第二电机转动地相连;或者双轴电机,第一传动带的一端与双轴电机的一个轴转动地相连,第二传动带的一端与双轴电机的另一轴转动地相连。
16、在一些实施例中,无人救援运输车包括监测决策系统,监测决策系统包括:
17、视觉传感器,用来图像识别环境中的物体和人员;
18、环境传感器,用来监测环境参数;
19、其中监测决策系统能够根据来自视觉传感器和环境传感器的信号,指示所述无人救援运输车作出适应性操作。
20、通过本发明能够在底盘机架的顶面上滑动和旋转担架平台,实现被救助者远距离自主救援和运输,并且运送救援物资也更便捷。
技术特征:
1.一种无人救援运输车,包括:
2.根据权利要求1所述的无人救援运输车,其中所述底盘车架(11)的尾端设有钩状件(113),所述担架平台(21)的头端设有枢转轴(222),所述枢转轴(222)能够可分离地接合到所述钩状件(113)中。
3.根据权利要求1所述的无人救援运输车,包括:
4.根据权利要求3所述的无人救援运输车,包括:
5.根据权利要求1所述的无人救援运输车,其中所述后支腿(115)的末端安装有滚轮(1151)。
6.根据权利要求1所述的无人救援运输车,包括:
7.根据权利要求6所述的无人救援运输车,其中所述悬挂机构(122)包括:
8.根据权利要求1所述的无人救援运输车,包括:
9.根据权利要求8所述的无人救援运输车,其中所述锁紧装置包括:
10.根据权利要求9所述的无人救援运输车,其中在所述担架平台(21)设有滑块(23),所述滑块(23)可滑动地布置在所述滑轨(111)中,第二定位孔(231)设置在所述滑块(23)上。
11.根据权利要求1所述的无人救援运输车,其中所述担架平台(21)设有自动输送的传送带(211)。
12.根据权利要求1所述的无人救援运输车,包括:
13.根据权利要求12所述的无人救援运输车,其中所述电机(112)包括:
14.根据权利要求1所述的无人救援运输车,包括监测决策系统(13),所述监测决策系统(13)包括:
技术总结
本发明涉及一种无人救援运输车,包括:底盘车架(11),在所述底盘车架(11)的顶面上设有纵向滑轨(111);以及担架平台(21),沿着所述滑轨(111)可滑动地布置,所述担架平台(21)的头端能够滑动到所述底盘车架(11)尾端并且与所述底盘车架(11)尾端可枢转地铰接,以使所述担架平台(21)相对于所述底盘车架(11)枢转。
技术研发人员:管越,张书杰,赵明安
受保护的技术使用者:江苏徐工工程机械研究院有限公司
技术研发日:
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!