路感模拟方法、装置和存储介质与流程
本发明涉及车辆,具体涉及一种路感模拟方法、装置和存储介质。
背景技术:
1、传统转向系统在方向盘与转向轮之间有机械连接,行驶过程中轮胎与路面接触的反馈通过机械路径可以传递到方向盘,驾驶员通过方向盘可以实时感受到路面情况。线控转向系统取消了传统转向系统从方向盘到转向轮之间的机械连接,能够实现方向盘和转向轮的解耦控制。但是,由于取消了机械连接,路面与轮胎之间的反馈信息无法直接传递到方向盘路感完全丧失,驾驶员无法实时感知路面情况,需要设置路感反馈单元重构和再现路感,让驾驶员感知到路面和整车状态的变化。
2、然而,在外部扰动和系统稳定性的影响下,方向盘的实际手力会偏离目标手力,有待进一步提高实际手力追踪目标手力的精准度。
3、本领域需要一种新的技术方案来解决上述问题。
技术实现思路
1、为了解决上述问题,即为了解决在外部扰动和系统稳定性的影响下,方向盘的实际手力会偏离目标手力,有待进一步提高实际手力追踪目标手力的精准度的问题。
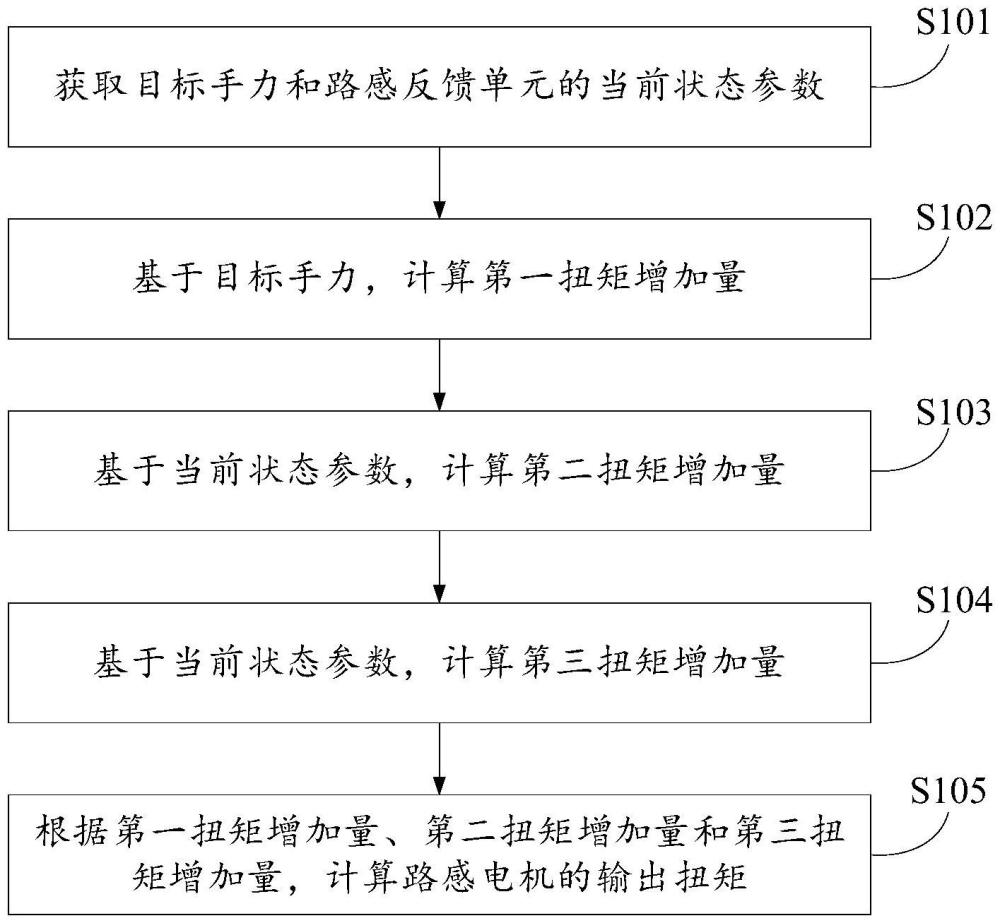
2、在第一方面,本发明提供一种路感模拟方法,所述方法应用于目标车辆,所述目标车辆包括路感反馈单元,路感反馈单元包括方向盘和路感电机,所述控制方法包括:获取目标手力和所述路感反馈单元的当前状态参数;基于所述目标手力,计算第一扭矩增加量;基于所述当前状态参数,计算第二扭矩增加量;基于所述当前状态参数,计算第三扭矩增加量;根据所述第一扭矩增加量、所述第二扭矩增加量和所述第三扭矩增加量,计算所述路感电机的输出扭矩。
3、在一些实施例中,所述路感反馈单元采用涡轮蜗杆传动机构;“基于所述目标手力,确定第一扭矩增加量”的步骤具体包括:获取所述涡轮蜗杆传动机构的涡轮蜗杆传递比;根据所述目标手力和所述涡轮蜗杆传递比,计算所述第一扭矩增加量。
4、在一些实施例中,所述第一扭矩增加量为treq/g,treq为所述目标手力,g为所述涡轮蜗杆传递比。
5、在一些实施例中,“基于所述当前状态参数,确定第二扭矩增加量”的步骤具体包括:获取预先建立的前馈观测器;将所述当前状态参数作为所述前馈观测器的输入,将所述前馈观测器的输出作为所述第二扭矩增加量。
6、在一些实施例中,所述前馈观测器通过下列步骤建立:基于路感反馈单元的状态参数变量、路感反馈单元的属性参数变量和所述第二扭矩增加量变量,构建所述路感反馈单元的前馈状态空间方程;基于所述前馈状态方程,构建所述前馈观测器。
7、在一些实施例中,“基于所述当前状态参数,确定第三扭矩增加量”的步骤具体包括:获取预先建立的反馈观测器;将所述当前状态参数作为所述反馈观测器的输入,将所述反馈观测器的输出作为所述第三扭矩增加量。
8、在一些实施例中,所述反馈观测器通过下列步骤建立:基于路感反馈单元的状态参数变量和属性参数变量,构建所述路感反馈单元的反馈状态空间方程;基于所述反馈状态空间方程,构建所述反馈观测器。
9、在一些实施例中,所述当前状态参数包括路感电机的当前电机力矩和当前方向盘扭矩。
10、第二方面,本发明提供了一种路感模拟装置,所述装置包括:获取模块,用于获取目标手力和所述路感反馈单元的当前状态参数;第一计算模块,用于基于所述目标手力,计算第一扭矩增加量;第二计算模块,用于基于所述当前状态参数,计算第二扭矩增加量;第三计算模块,用于基于所述当前状态参数,计算第三扭矩增加量;第四计算模块,用于根据所述第一扭矩增加量、所述第二扭矩增加量和所述第三扭矩增加量,计算所述路感电机的输出扭矩。
11、第三方面,本发明提供了一种计算机可读的存储介质,所述计算机可读的存储介质包括存储的程序,其中,所述程序运行时执行上述的路感模拟方法。
12、在采用上述技术方案的情况下,本发明提供的线控转向系统的路感模拟方法、装置和存储介质,通过第一扭矩增加量有利于减小稳态误差的影响,通过第二扭矩增加量有利于减小外部扰动的影响,通过第三扭矩增加量有利于降低模型参数不确定性的影响。根据第一扭矩增加量、第二扭矩增加量和第三扭矩增加量计算路感模拟器路感电机的输出扭矩,能够将路面情况有效转换成模拟手力传递给驾驶员,减小外部扰动和系统稳定性对实际手力的影响,使实际手力实时精确跟踪目标手力,从而使驾驶员实时感知路面情况,提高驾驶体验和驾驶安全性。
技术特征:
1.一种路感模拟方法,所述方法应用于目标车辆,所述目标车辆包括路感反馈单元,路感反馈单元包括方向盘和路感电机,
2.根据权利要求1所述的控制方法,其特征在于,所述路感反馈单元采用涡轮蜗杆传动机构;
3.根据权利要求2所述的控制方法,其特征在于,所述第一扭矩增加量为treq/g,treq为所述目标手力,g为所述涡轮蜗杆传递比。
4.根据权利要求1所述的控制方法,其特征在于,“基于所述当前状态参数,确定第二扭矩增加量”的步骤具体包括:
5.根据权利要求4所述的控制方法,其特征在于,所述前馈观测器通过下列步骤建立:
6.根据权利要求1所述的控制方法,其特征在于,“基于所述当前状态参数,确定第三扭矩增加量”的步骤具体包括:
7.根据权利要求6所述的控制方法,其特征在于,所述反馈观测器通过下列步骤建立:
8.根据权利要求1至6中任一项所述的控制方法,其特征在于,所述当前状态参数包括路感电机的当前电机力矩和当前方向盘扭矩。
9.一种路感模拟装置,其特征在于,所述装置包括:
10.一种计算机可读的存储介质,其特征在于,所述计算机可读的存储介质包括存储的程序,其中,所述程序运行时执行权利要求1至8中任一项所述的路感模拟方法。
技术总结
本发明涉及车辆技术领域,具体提供一种路感模拟方法、装置和存储介质,旨在解决在外部扰动和系统稳定性的影响下,方向盘的实际手力会偏离目标手力,需要提高实际手力追踪目标手力的精准度的问题。为此目的,本发明的控制方法包括:获取目标手力和路感反馈单元的当前状态参数;基于目标手力,计算第一扭矩增加量;基于当前状态参数,计算第二扭矩增加量;基于当前状态参数,计算第三扭矩增加量;根据第一扭矩增加量、第二扭矩增加量和第三扭矩增加量,计算路感电机的输出扭矩。基于上述方案,本发明能够减小外部扰动和系统稳定性对实际手力的影响,使实际手力实时精确跟踪目标手力,从而使驾驶员实时感知路面情况,提高驾驶体验和安全性。
技术研发人员:吴光耀,周锦鸿,李晓迪,王保田,原达,肖柏宏
受保护的技术使用者:蔚来汽车科技(安徽)有限公司
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!