一种各向异性复合材料履带及履带密封式爬壁机器人的制作方法
本申请涉及特种机器人领域,尤其是涉及一种各向异性复合材料履带及履带密封式爬壁机器人。
背景技术:
1、现有壁面高空作业基本采用人工作业,存在作业风险高、效率低、成本高、人员短缺等问题,使用爬壁机器人替代人工进行高空作业是一种有效的解决办法。履带密封式爬壁机器人相比于其他类型的负压爬壁机器人,因其负压腔体与行走机构一体,即保持了负压吸附爬壁机器人良好壁面适应性的同时又兼具优异的负载能力及越障能力,逐渐受到广泛的应用。履带密封式爬壁机器人的履带因其要时刻围蔽成一个密封的腔体,常常使用海绵作为履带,确保与壁面完全贴合,而柔软的海绵在爬壁机器人转弯过程中,或者斜向运动时,由于受到横向力的作用,两个履带之间会形成缺口,从而造成了漏气,引起爬壁机器人吸附力下降甚至直接掉落。因此一种理想的适用于履带密封式爬壁机器人的履带是在垂直壁面方向上履带保持良好的弹性,能够与壁面完全贴合,而在平行壁面方向上,履带必须保持一定的刚度不发生变形。
2、现有技术中,授权公告号为cn209600666u的中国专利公开了一种基于滚动密封的负压吸附履带式爬壁机器人,它包括用于产生负压的负压吸附系统,所述负压吸附系统与滚动密封机构相配合,并使滚动密封机构产生负压吸附在流道的侧壁上,所述滚动密封机构通过传动系统与驱动系统相连,所述驱动系统固定安装在负压吸附系统上。其驱动履带采用双层结构,外层采用泡棉材料,并对负压腔左右进行密封,内层粘有一层同步带与驱动履带轮啮合传动,将动力从驱动履带轮传到驱动履带,使机器人在壁面运动。
3、虽然目前履带式密封爬壁机器人层出不穷,但是结构性能方面都还存在较多缺陷:
4、1)现有履带密封式爬壁机器人传动系统中的电机放置在框架腔体当中,其履带同步轮两端外接传动同步轮或链轮,由同步带或者链条将电机动力传递至履带,该种结构一方面占用了框架腔体内部空间风机的安装位置,不得不抬高风机露出腔体,提高爬壁机器人重心并对噪音也有一定的影响;另一方面履带内部空间利用率不足,外接的传动同步轮或链轮增大了爬壁机器人的宽度和重量。
5、2)现有履带密封式爬壁机器人履带一般采用双层结构,其中一层为同步带,主要起传动作用,另一层为泡棉或其他多孔弹性材料,其中多孔材料才是起到密封的关键。但是由于要保证履带与壁面的贴合性能,履带在选材过程中往往只考虑了材料压缩性能和回弹性能,而忽视了材料的刚度,这种履带只适合爬壁机器人直行,在爬壁机器人转弯过程中履带之间容易发生变形、翻边,从而产生漏气,影响爬壁机器人的吸附性能。
6、3)现有履带密封式爬壁机器人履带只有两层,最外层的泡棉或其他多孔弹性材料材质较软不耐磨损,履带寿命有限。
技术实现思路
1、本发明专利提出了一种各向异性复合材料履带及履带密封式爬壁机器人,通过将爬壁机器人传动系统集成至履带位置,将框架腔体内部空间腾出,便于风机及其他电器零部件,降低了爬壁机器人重心,使爬壁机器人整体结构更加紧凑;采用经过设计的各向异性复合材料履带,其最里层为同步带,中间层为网格状弹性层,最外层为增摩耐磨层,两侧为密封层,旨在解决现有方案爬壁机器人转弯过程中履带变形引起漏气、履带不耐磨损及履带之间摩擦力大等问题,有效提高爬壁机器人的壁面活动能力及适应性。
2、为实现上述目的,本发明所采取的技术方案为:
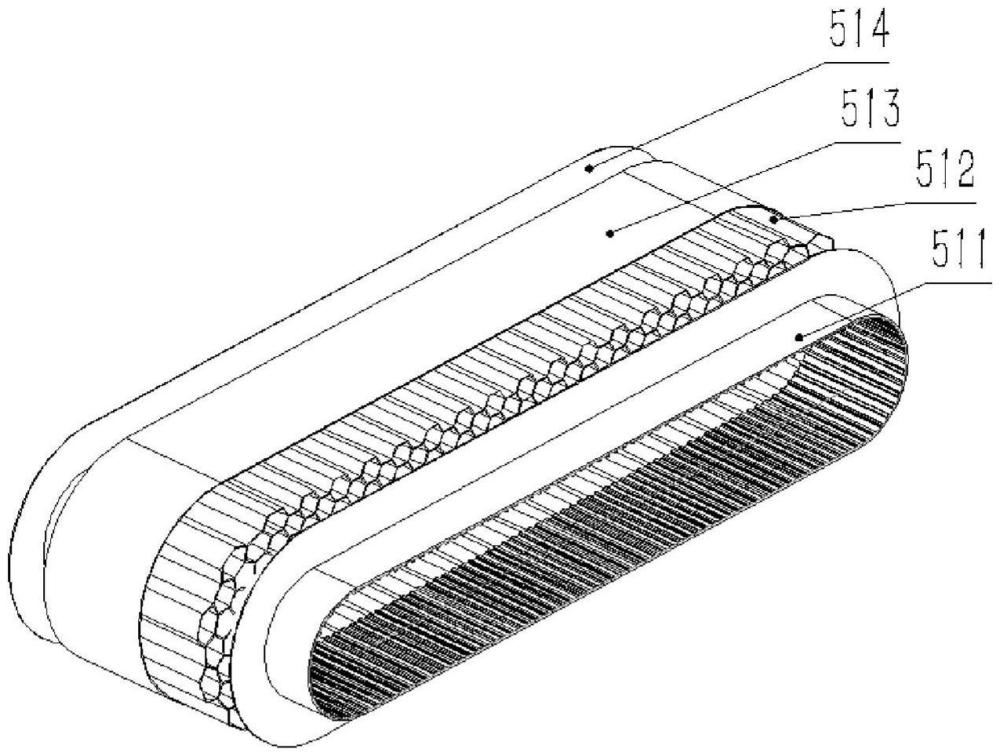
3、一方面,本发明提供了一种各向异性复合材料履带,应用于履带式密封爬壁机器人,所述履带具有具多层复合结构,其中最里层为同步带,中间层为弹性层,最外层为增摩耐磨层,两侧为密封层,所述各层之间使用粘接工艺结合。
4、优选的,所述中间弹性层采用多孔网状结构设计,孔洞的形状可以是规则的多边形、圆形或者是不规则的孔。
5、优选的,所述中间弹性层采用海绵材料,海绵材料中间加入互相错开的横向加强筋。
6、优选的,所述增摩耐磨层采用表面微凸的耐磨氯丁橡胶材质,粘贴在弹性层外层。
7、优选的,所述密封层粘贴在中间弹性层的两侧。
8、另一方面,本发明提供了一种履带式密封爬壁机器人,包括框架系统、吸附系统、驱动系统、传动系统和密封系统,所述密封系统包含多条如第一方面所述的履带。
9、优选的,所述框架系统包含曲面框架及两侧的支撑板。
10、优选的,所述履带与框架系统中的曲面框架围蔽成一个密闭的腔体。优选的,所述吸附系统包括负压风机,所述负压风机安装于曲面框架的底板上。
11、优选的,所述驱动系统包括电机,所述电机分别安装在所述两侧的支撑板上。
12、优选的,所述传动系统包括齿轮、驱动同步轮以及从动同步轮,其中所述电机与所述齿轮相连,所述齿轮与所述驱动同步轮根部的齿轮啮合,带动所述驱动同步轮和所述履带发生转动。
13、本发明提供的一种各向异性复合材料履带及履带密封式爬壁机器人,与现有技术相比,具有以下有益效果:
14、1)本发明采用网格状弹性层和使用加强筋的方法,在保证履带压缩方向弹性的情况下,提高了履带的横向刚度,避免了爬壁机器人在转弯过程中履带之间因为摩擦扭转发生变形、翻边,从而产生漏气,提高了爬壁机器人的吸附稳定性,而常用的泡棉类履带弹性层,各方向性能一致,只能保证壁面压缩方向的弹性,因此履带压缩性很好,但横向方向很容易变形造成漏气。
15、2)本发明采用多层复合材料履带可以有效满足履带各个方向的性能要求,相比于常见的泡棉加同步带的双层履带结构只具备单一的压缩密封性能,多层复合材料履带可以使履带不同方向具有不同的性能,其中最外层具有增摩耐摩特性,能够提高履带与壁面摩擦力及耐磨性能,提高使用寿命,中间层具有良好的贴合性能和横向刚度,两侧具有良好的密封性能,从而使履带具备最优的综合性能。
16、3)本发明从提高爬壁机器人空间利用率的角度采用搭配直角减速器的电机,将电机安装在框架两侧的安装板上,通过齿轮传动或者同步带传动,将动力传递至爬壁机器人履带及滚筒,实现爬壁机器人整体运动,该结构相比于常见的电机安装位置和传动方式,整个传动结构更加紧凑,空间利用率更大。
17、通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
技术特征:
1.一种各向异性复合材料履带,应用于履带式密封爬壁机器人,其特征在于,所述履带具有多层复合结构,其中最里层为同步带,中间层为弹性层,最外层为增摩耐磨层,两侧为密封层,所述各层之间使用粘接工艺结合。
2.根据权利要求1所述的履带,其特征在于,所述中间弹性层采用多孔网状结构设计,孔洞的形状可以是规则的多边形、圆形或者是不规则的孔。
3.根据权利要求2所述的履带,其特征在于,所述中间弹性层采用海绵材料,海绵材料中间加入互相错开的横向加强筋。
4.根据权利要求1所述的履带,其特征在于,所述增摩耐磨层采用表面微凸的耐磨氯丁橡胶材质,粘贴在弹性层外层。
5.根据权利要求1所述的履带,其特征在于,所述密封层粘贴在中间弹性层的两侧。
6.一种履带式密封爬壁机器人,包括框架系统、吸附系统、驱动系统、传动系统和密封系统,其特征在于,所述密封系统包含多条如权利要求1~4所述的履带。
7.根据权利要求5所述的履带式密封爬壁机器人,其特征在于,所述框架系统包含曲面框架及两侧的支撑板。
8.根据权利要求6所述的履带式密封爬壁机器人,其特征在于,所述履带与框架系统中的曲面框架围蔽成一个密闭的腔体。
9.根据权利要求6所述的履带式密封爬壁机器人,其特征在于,所述吸附系统包括负压风机,所述负压风机安装于曲面框架的底板上。
10.根据权利要求6所述的履带式密封爬壁机器人,其特征在于,所述驱动系统包括电机,所述电机分别安装在所述两侧的支撑板上。
11.根据权利要求9所述的履带式密封爬壁机器人,其特征在于,所述传动系统包括齿轮、驱动同步轮以及从动同步轮,其中所述电机与所述齿轮相连,所述齿轮与所述驱动同步轮根部的齿轮啮合,带动所述驱动同步轮和所述履带发生转动。
技术总结
本发明公开了一种各向异性复合材料履带及履带式密封爬壁机器人,包括复合材料履带及履带式密封爬壁机器人,其中复合材料履带具有多层复合结构,其中最里层为同步带,中间层为弹性层,最外层为增摩耐磨层,两侧为密封层,各层之间使用粘接工艺结合。履带式密封爬壁机器人还包括框架系统、吸附系统、驱动系统、传动系统、密封系统。本发明解决了传统履带密封式爬壁机器人运动时转弯过程中履带变形引起漏气、履带不耐磨损及履带之间摩擦力大等问题,有效提高爬壁机器人的壁面活动能力及适应性。
技术研发人员:任龙,汪冬冬,李成让,赵成颢,郭胜琦
受保护的技术使用者:中国电子科技南湖研究院
技术研发日:
技术公布日:2024/8/27
- 还没有人留言评论。精彩留言会获得点赞!