一种机器人行走的阿基米德螺线圆弧腿驱动结构
本发明涉及机器人驱动结构,具体涉及一种机器人行走的阿基米德螺线圆弧腿驱动结构。
背景技术:
1、目前移动机器人的驱动机构主要有轮式和腿式这两种。轮式驱动结构简单,运行速度快,但越障能力较弱,复杂地形下运行不平稳;腿式机器人具有灵活的肢体关节,它们可以通过调整腿部的关节角度以保持崎岖地形下稳定的运动,但是行走速度通常比较慢。
2、轮式和腿式复合的机器人驱动结构可以很好地提高机器人的运动性能,解决单一驱动不能解决的问题。但现有的轮腿复合的驱动结构形状复杂,且由于复合腿圆心与机器人驱动轴的偏心导致机器人行走不稳,重心波动大的问题。
3、1999年麦吉尔大学设计六足机器人首次提出了圆弧腿的驱动结构,其外形为c型的圆弧腿,可以很好地融合轮式机器人和腿式机器人的优点,为机器人的设计研究提供了新的思路。c型圆弧腿的结构还具有良好的稳定性和承载能力。
4、然而,在现有的圆弧腿机器中,机器人行走稳定性和重心波动较大是一个亟需解决的问题。
技术实现思路
1、为了克服以上技术问题,本发明的目的在于提供一种机器人行走的阿基米德螺线圆弧腿驱动结构,解决了现有的轮腿复合的驱动结构形状复杂,且由于复合腿圆心与机器人驱动轴的偏心导致行走不稳,重心波动大的问题。该结构将机器人的动力输出轴的扭矩平滑过渡到机器人的足端,同时这中驱动结构行走时机器人的重心波动为0。
2、为了实现上述目的,本发明采用的技术方案是:
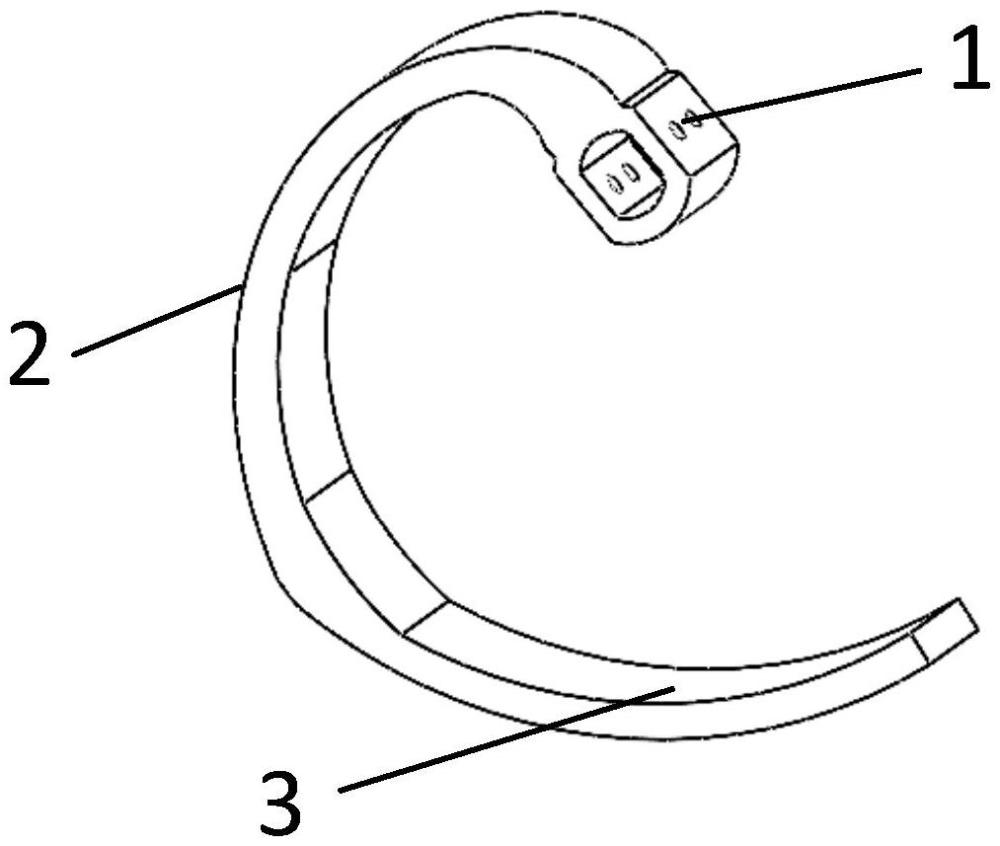
3、一种机器人行走的阿基米德螺线圆弧腿驱动结构,包括输出轴连接段,输出轴连接段为圆形和矩形复合的环形结构,环形结构的环形内侧为环形通孔,环形结构的外侧和环形通孔轮廓保持一致,环形结构的圆形侧与阿基米德螺线段一端平滑过渡,阿基米德螺线段的外形轮廓的圆心在所述环形通孔的圆心o处,所述圆心o为阿基米德螺线段的圆心与机器人输出轴中心重合处,阿基米德螺线段另一端为圆弧段。
4、所述输出轴连接段为圆形和矩形复合的环形结构,环形结构为四个面,圆形和圆形两个面对应设置,矩形和矩形两个面对应设置。
5、所述输出轴连接段外侧轮廓为矩形的部分设置两个圆形通孔,在宽度方向上对称分布,用于安装螺钉,实现机器人驱动结构与输出轴连接段的固定。
6、所述输出轴连接段内部设计有圆孔,圆孔与机器人腿部的输出轴连接,同时在外侧设计有两个通孔用于两者的定位配合。
7、所述阿基米德螺线段从与输出轴连接段连接处开始,从圆心o处曲率半径逐渐增大。
8、所述圆弧段为以圆心o处为圆心的一段圆弧,圆弧段与阿基米德螺线段连接处相切,曲率半径相等。
9、所述圆弧段的圆心角范围为0~0.4π。
10、圆弧段为圆心在o处的一段圆弧,在与阿基米德螺线段在b点处开始拼接,两个弧段在连接点b点相切,在相切处曲率半径相等,方向由b点指向圆心,即阿基米德螺线段的终点处和圆弧段半径相等,弧线内侧和外侧为等距曲线,内外侧距离为阿基米德螺线圆弧腿的厚度。
11、所述阿基米德螺线段的阿基米德螺线公式:
12、x=(a+bθ)cos(θ)
13、y=(a+bθ)sin(θ)
14、其中,a为阿基米德螺线段起点处到圆心的距离,也即初始半径长度,b为螺旋线每增加单位角度曲率半径随之对应增加的数值,通过调节a和b的数值调节螺线段初始半径长度和半径增大速度,a取值在0和圆弧段半径r之间,b为半径增大速度,大于0,阿基米德螺线段的圆心角θ的从0开始逐渐增大,直到曲率半径与圆弧段半径相等。
15、圆弧段为等半径圆弧,圆弧半径与阿基米德螺线段的终点处的半径相等,半径可根据机器人的实际尺寸和运动参数进行确定。
16、本发明的有益效果:
17、本发明通过阿基米德螺线段和圆弧段复合的机器人驱动结构,可以降低机器人行走时的关节冲击,减小机器人的重心波动,提高机器人行走稳定性,保证机器人的稳定高速行走。
18、本发明的综合轮式驱动腿和足式驱动腿的优点,采用阿基米德螺线圆弧腿机器人既能保证像轮式机器人的行走速度,又能保证像腿式机器人的行走稳定性。
技术特征:
1.一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,包括输出轴连接段(1),输出轴连接段(1)为圆形和矩形复合的环形结构,环形结构的环形内侧为环形通孔,环形结构的外侧和环形通孔轮廓保持一致,环形结构的圆形侧与阿基米德螺线段(2)一端平滑过渡,阿基米德螺线段(2)的外形轮廓的圆心在所述环形通孔的圆心o处,所述圆心o为阿基米德螺线段(2)的圆心与机器人输出轴中心重合处,阿基米德螺线段(2)另一端为圆弧段(3)。
2.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,所述输出轴连接段(1)为圆形和矩形复合的环形结构,环形结构为四个面,圆形和圆形两个面对应设置,矩形和矩形两个面对应设置。
3.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,所述输出轴连接段(1)外侧轮廓为矩形的部分设置两个圆形通孔,在宽度方向上对称分布,用于安装螺钉,实现机器人驱动结构与输出轴连接段(1)的固定。
4.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,所述阿基米德螺线段(2)从与输出轴连接段(1)连接处开始,从圆心o处曲率半径逐渐增大。
5.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,所述圆弧段(3)为以圆心o处为圆心的一段圆弧,圆弧段(3)与阿基米德螺线段(2)连接处相切,曲率半径相等。
6.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,所述圆弧段(3)的圆心角范围为0~0.4π°。
7.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,圆弧段(3)为圆心在o处的一段圆弧,在与阿基米德螺线段(2)在b点处开始拼接,两个弧段在连接点b点相切,在相切处曲率半径相等,方向由b点指向圆心,即阿基米德螺线段(2)的终点处和圆弧段(3)半径相等,弧线内侧和外侧为等距曲线,内外侧距离为阿基米德螺线段(2)圆弧腿的厚度。
8.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,所述阿基米德螺线段(2)的阿基米德螺线公式:
9.根据权利要求1所述的一种机器人行走的阿基米德螺线圆弧腿驱动结构,其特征在于,圆弧段(3)为等半径圆弧,圆弧半径与阿基米德螺线段(2)的终点处的半径相等,半径可根据机器人的实际尺寸和运动参数进行确定。
技术总结
本发明公开了一种机器人行走的阿基米德螺线圆弧腿驱动结构,包括输出轴连接段,输出轴连接段为圆形和矩形复合的环形结构,环形结构的环形内侧为环形通孔,环形结构的外侧和环形通孔轮廓保持一致,环形结构的圆形侧与阿基米德螺线段一端平滑过渡,阿基米德螺线段的外形轮廓的圆心在所述环形通孔的圆心O处,阿基米德螺线段另一端为圆弧段。本发明解决了现有的轮腿复合的驱动结构形状复杂,且由于复合腿圆心与机器人驱动轴的偏心导致行走不稳,重心波动大的问题。该结构将机器人的动力输出轴的扭矩平滑过渡到机器人的足端,同时这中驱动结构行走时机器人的重心波动为0。
技术研发人员:朱爱斌,毛涵,吕君贤,董霞,马培锋,宋纪元,屠尧,武鑫雨,张迪
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!