胯部组件和人形机器人的制作方法
本发明涉及人形机器人,具体涉及一种胯部组件和人形机器人。
背景技术:
1、人形机器人能够模仿人体的外形和运动姿态,具有广阔的发展前景。和人体类似,人形机器人的结构包括腿部组件、胯部组件和腰部组件等,胯部组件连接在腿部组件和腰部组件之间。
2、胯部组件主要用于实现髋关节功能,用以驱动腿部组件运动以模拟人体的运动姿态,目前的胯部组件的结构设置不合理,导致腿部组件能够运动的角度过小,不能做大角度的动作。
技术实现思路
1、本发明的目的是提供一种胯部组件和人形机器人,解决胯部组件结构不合理导致腿部组件不能做大角度的动作的问题。
2、为实现本发明的目的,本发明提供了如下的技术方案:
3、第一方面,本发明提供一种胯部组件,用于人形机器人,包括:
4、骶关节机构,用于与腰部组件连接,并用于驱动所述腰部组件绕第一轴线转动;
5、髋关节机构,用于与腿部组件连接;所述髋关节机构包括俯仰驱动件,所述俯仰驱动件与所述骶关节机构连接,所述俯仰驱动件用于驱动所述腿部组件绕第二轴线转动;
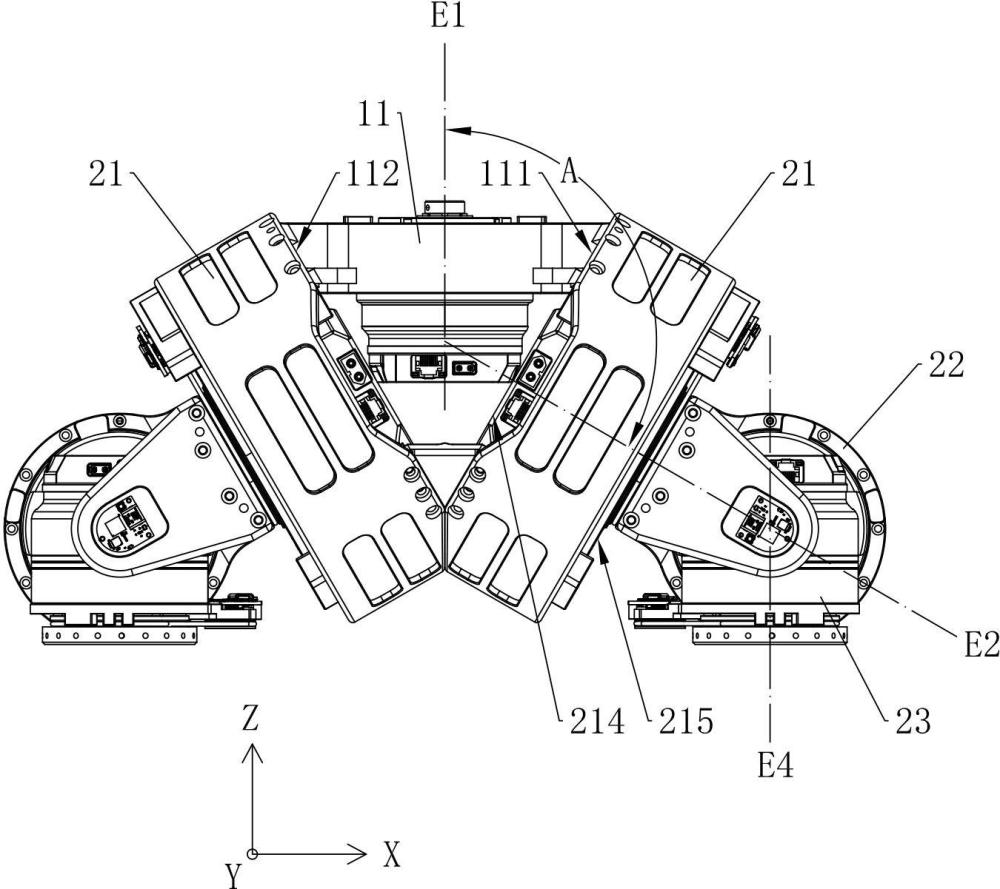
6、其中,所述第一轴线与所述第二轴线相交且具有倾斜夹角。
7、本发明提供的胯部组件,通过设置髋关节机构的俯仰驱动件斜置设计,即第一轴线与第二轴线相交且具有倾斜夹角,胯部组件结构设置合理,能够使得腿部组件能够具有更大的运动角度,能做大角度的动作。
8、一种实施方式中,所述第一轴线与所述第二轴线的夹角为a,满足:90°<a≤160°。满足90°<a≤160°,使得俯仰驱动件相对于骶关节机构的倾斜程度适中,使得腿部组件可进行大角度的动作,夹角a在上述范围内时,能够获得较为和人体运动姿态类似的转动角度,可具有良好的仿人效果。
9、一种实施方式中,所述骶关节机构包括在所述人形机器人的左右方向上的第一侧面,所述俯仰驱动件的一侧与所述第一侧面连接,相背的另一侧位于所述骶关节机构朝向所述腿部组件的一侧,所述俯仰驱动件远离所述骶关节机构的一侧在所述第一轴线的正投影中落在所述骶关节机构上。如此设置,相比于目前的俯仰驱动件的轴线与第一轴线垂直的方案,可使得腿部组件的轴线与胯部组件的轴线(即第一轴线)在人形机器人的左右方向上距离更近,与人体结构更类似,使得胯部组件驱动腿部组件做行走动作时,行走动作更拟人。
10、一种实施方式中,所述骶关节机构还包括与所述第一侧面相背的第二侧面,所述髋关节机构为两个,另一个所述髋关节机构的所述俯仰驱动件的一侧与所述第二侧面连接,相背的另一侧位于所述骶关节机构朝向所述腿部组件的一侧,且在所述第一轴线的正投影中落在所述骶关节机构上。如此设置,使得两个髋关节机构分别用于驱动两个腿部组件运动,以模拟人体的左右腿的行走动作,行走动作更拟人。
11、一种实施方式中,两个所述髋关节机构各自的所述俯仰驱动件远离所述骶关节机构的一侧连接固定。如此设置,使得两个俯仰驱动件和骶骨件连接形成稳定的结构,保证胯部组件整体具有稳定的结构。
12、一种实施方式中,两个所述髋关节机构相对所述第一轴线对称设置。通过设置对称的两个髋关节机构,可使得两个髋关节机构的控制逻辑和运动姿态类似,可节省控制程序开发时长,控制要求降低。另外,由于两个髋关节机构的俯仰驱动件均是斜置的,对称设置的两个髋关节机构可使得两个腿部组件之间的距离(即在人形机器人的左右方向上的尺寸)缩短,从外形看对称的髋关节机构也与人体更为相似,仿人效果好。
13、一种实施方式中,所述髋关节机构还包括横滚驱动件和偏航驱动件,所述横滚驱动件与所述俯仰驱动件连接,所述偏航驱动件与所述横滚驱动件连接,所述俯仰驱动件用于驱动所述横滚驱动件绕所述第二轴线转动,所述横滚驱动件用于驱动所述偏航驱动件绕第三轴线转动,所述偏航驱动件用于驱动所述腿部组件绕第四轴线转动,其中,所述第二轴线、所述第三轴线和所述第四轴线相交于一点。俯仰驱动件用于驱动腿部组件在人形机器人的前后方向上摆动,横滚驱动件用于驱动腿部组件在人形机器人的左右方向上摆动,偏航驱动件用于驱动腿部组件绕自身轴线转动,如此,可实现腿部组件模拟人体的各种运动姿态,功能丰富。另外,由于俯仰驱动件斜置,可使得横滚驱动件在驱动腿部组件在人形机器人的左右方向上摆动时,腿部组件具有更大的摆动角度,并且初始状态下腿部组件处于直立状态时,腿部组件位于其在人形机器人的左右方向上能够摆动的角度范围内的大致中间位置,横滚驱动件所需驱动腿部组件向外摆动或向内摆动所需的扭矩都可以较小,即前述的俯仰驱动件的斜置设置,可以降低横滚驱动件的扭矩需求。第二轴线、第三轴线和第四轴线相交于一点,可使得髋关节机构与人体结构更为相似,使得腿部组件的行走动作更拟人。
14、一种实施方式中,所述第三轴线与所述第四轴线垂直。如此,可使得横滚驱动件和偏航驱动件的结构设置较为简单,能够降低成本,且使得髋关节机构与人体结构更为相似,使得腿部组件的行走动作更拟人。
15、一种实施方式中,所述横滚驱动件与所述骶关节机构分别位于所述俯仰驱动件在所述第二轴线的延伸方向上相背的两侧。可使得结构布置合理,避免产生干涉。
16、第二方面,本发明还提供一种人形机器人,包括腰部组件、腿部组件和第一方面各种实施方式中任一项所述的胯部组件,所述胯部组件的骶关节机构与所述腰部组件连接,所述胯部组件的髋关节机构与所述腿部组件连接。
技术特征:
1.一种胯部组件,其特征在于,用于人形机器人,包括:
2.根据权利要求1所述的胯部组件,其特征在于,所述第一轴线与所述第二轴线的夹角为a,满足:90°<a≤160°。
3.根据权利要求2所述的胯部组件,其特征在于,所述骶关节机构包括在所述人形机器人的左右方向上的第一侧面,所述俯仰驱动件的一侧与所述第一侧面连接,相背的另一侧位于所述骶关节机构朝向所述腿部组件的一侧,所述俯仰驱动件远离所述骶关节机构的一侧在所述第一轴线的正投影中落在所述骶关节机构上。
4.根据权利要求3所述的胯部组件,其特征在于,所述骶关节机构还包括与所述第一侧面相背的第二侧面,所述髋关节机构为两个,另一个所述髋关节机构的所述俯仰驱动件的一侧与所述第二侧面连接,相背的另一侧位于所述骶关节机构朝向所述腿部组件的一侧,且在所述第一轴线的正投影中落在所述骶关节机构上。
5.根据权利要求4所述的胯部组件,其特征在于,两个所述髋关节机构各自的所述俯仰驱动件远离所述骶关节机构的一侧连接固定。
6.根据权利要求4所述的胯部组件,其特征在于,两个所述髋关节机构相对所述第一轴线对称设置。
7.根据权利要求1至6任一项所述的胯部组件,其特征在于,所述髋关节机构还包括横滚驱动件和偏航驱动件,所述横滚驱动件与所述俯仰驱动件连接,所述偏航驱动件与所述横滚驱动件连接,所述俯仰驱动件用于驱动所述横滚驱动件绕所述第二轴线转动,所述横滚驱动件用于驱动所述偏航驱动件绕第三轴线转动,所述偏航驱动件用于驱动所述腿部组件绕第四轴线转动,其中,所述第二轴线、所述第三轴线和所述第四轴线相交于一点。
8.根据权利要求7所述的胯部组件,其特征在于,所述第三轴线与所述第四轴线垂直。
9.根据权利要求7所述的胯部组件,其特征在于,所述横滚驱动件与所述骶关节机构分别位于所述俯仰驱动件在所述第二轴线的延伸方向上相背的两侧。
10.一种人形机器人,其特征在于,包括腰部组件、腿部组件和如权利要求1至9任一项所述的胯部组件,所述胯部组件的骶关节机构与所述腰部组件连接,所述胯部组件的髋关节机构与所述腿部组件连接。
技术总结
一种胯部组件和人形机器人,胯部组件用于人形机器人,包括骶关节机构和髋关节机构,骶关节机构用于与腰部组件连接,并用于驱动腰部组件绕第一轴线转动;髋关节机构用于与腿部组件连接;髋关节机构包括俯仰驱动件,俯仰驱动件与骶关节机构连接,俯仰驱动件用于驱动腿部组件绕第二轴线转动;其中,第一轴线与第二轴线相交且具有倾斜夹角。通过设置髋关节机构的俯仰驱动件斜置设计,即第一轴线与第二轴线相交且具有倾斜夹角,胯部组件结构设置合理,能够使得腿部组件能够具有更大的运动角度,能做大角度的动作。
技术研发人员:董凯,郑福康,肖丹萍
受保护的技术使用者:上海傅利叶智能科技有限公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!