一种车辆方向盘回正方法、车辆及储存介质与流程
本发明涉及机动车的转向机构,尤其涉及一种车辆方向盘回正方法、车辆及储存介质。
背景技术:
1、车辆在泊车完成后,由于人为操作未将车辆方向盘回正到位或者是受到车辆相关模块的响应速度和泊车线路算法的限制方向盘未进行回正操作,此时需要车辆在静止状态下对方向盘进行回正操作,由于轮胎受到地面摩擦力、轮胎弹性形变等前悬架综合应力的影响,方向盘在转动回正后会出现偏转现象。现时通过对方向盘回正角度进行补偿来实现自动泊车结束后方向盘回正操作,而对方向盘回正补偿的角度计算依赖大量台架试验,需要结合前轴载荷、天气、轮胎性能、地面条件、车辆转向系统各部分老化等数据建立试验后的数据模型,从而使得方向盘可在实际使用中根据不同的使用环境而进行自动回正操作。由此可见,现时对于车辆方向盘自动回正操作研发成本高,并且依赖于研发时建立的数据模型,对于不同的使用环境适应性差,因此,亟需一种易于开发、适应性更好的方向盘回正方法。
技术实现思路
1、本发明目的在于提供一种车辆方向盘回正方法、车辆及储存介质,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、根据本发明第一方面实施例的一种车辆方向盘回正方法,包括:
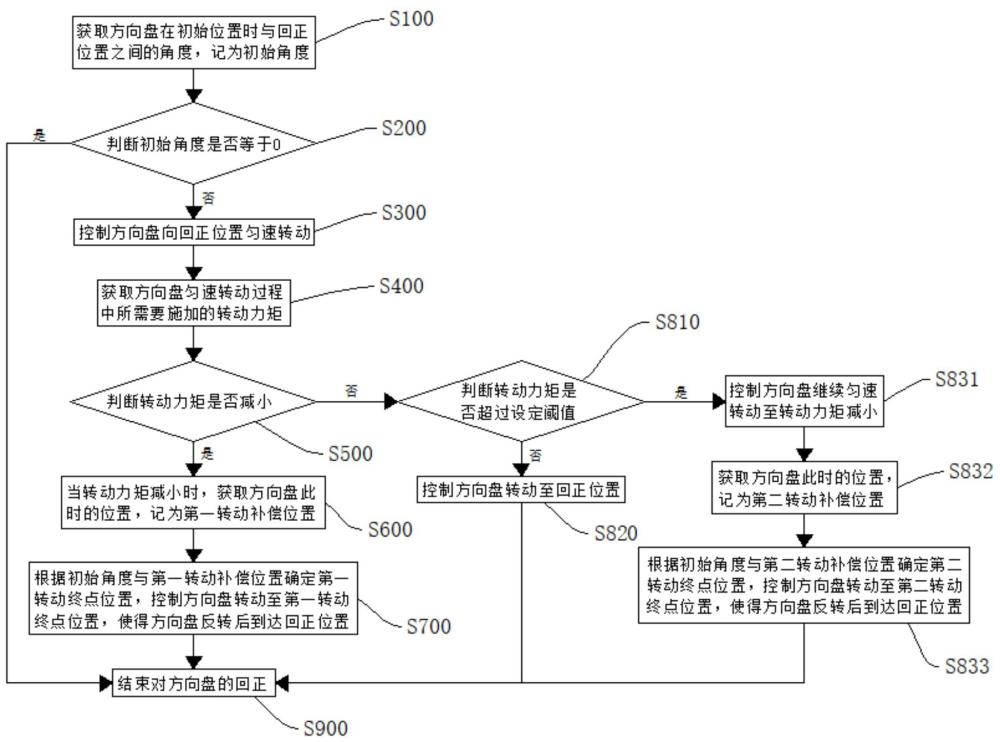
3、获取所述方向盘在初始位置时与回正位置之间的角度,记为初始角度;
4、判断所述初始角度是否等于0;
5、当所述初始角度不等于0时,控制所述方向盘向所述回正位置匀速转动;
6、获取所述方向盘匀速转动过程中所需要施加的转动力矩;
7、判断所述转动力矩是否减小;
8、当所述转动力矩减小时,获取所述方向盘此时的位置,记为第一转动补偿位置;
9、根据所述初始角度与所述第一转动补偿位置确定第一转动终点位置,控制所述方向盘转动至所述第一转动终点位置,使得所述方向盘反转后到达所述回正位置。
10、该技术方案至少具有如下的有益效果:获取此时方向盘距离与回正位置之间形成的角度,回正位置为方向盘在回正时需要达到的位置,一般为方向盘位于居中状态,当初始角度不等于0时,亦即方向盘未回正,确定需要对方向盘进行回正操作,此时控制方向盘向回正位置匀速转动,当前悬架综合应力对轮胎的影响较大时,轮胎与轮毂之间会发相对偏转,导致轮胎发生弹性形变,与地面之间的摩擦为静摩擦,随着方向盘转动角度增加,对方向盘所需要施加的转动力矩会逐渐增大,当转动力矩大于静摩擦力时,轮胎相对地面滑移,此时轮胎与地面之间的摩擦为滑动摩擦,所需要对方向盘匀速转动的转动力矩减小,记录此时方向盘在匀速转动时受到转动力矩减小的位置为第一转动补偿位置,轮胎在初始位置与第一转动补偿位置之间转动的角度为克服前悬架综合应力的补偿角度,由此结合初始角度确定得到第一转动终点位置,将方向盘转动至第一转动终点位置后,方向盘失去转动力矩,此时轮胎弹性复原并带动方向盘反转,使得方向盘返回至回正位置,如此可对车辆方向盘在不同环境下实现自动回正,通用性更强,并且在生产开发时不需要进行大量台架试验进行数据积累,直接在使用时通过对方向盘转动力矩的反馈确定对前悬架综合应力的补偿,大幅降低了开发成本,提高生产效益。
11、根据本发明的一些实施例,所述车辆方向盘回正方法,还包括:
12、当所述转动力矩未减小时,判断所述转动力矩是否超过设定阈值;
13、当所述转动力矩未超过所述设定阈值时,控制所述方向盘转动至所述回正位置。
14、根据本发明的一些实施例,所述车辆方向盘回正方法,还包括:
15、当所述转动力矩超过所述设定阈值时,控制所述方向盘继续匀速转动至所述转动力矩减小;
16、获取所述方向盘此时的位置,记为第二转动补偿位置;
17、根据本发明的一些实施例,所述控制所述方向盘转动至所述第一转动终点位置,包括:
18、控制所述方向盘从所述第一转动补偿位置向所述第二转动终点位置匀速转动。
19、根据所述初始角度与所述第二转动补偿位置确定第二转动终点位置,控制所述方向盘转动至所述第二转动终点位置,使得所述方向盘反转后到达所述回正位置。
20、根据本发明的一些实施例,所述根据所述初始角度与所述第二转动补偿位置确定第二转动终点位置,包括:
21、在所述第二转动补偿位置朝远离所述回正位置的方向将所述方向盘以所述初始角度的数值转动,所述方向盘转动终点的位置为所述第二转动终点位置。
22、根据本发明的一些实施例,所述控制所述方向盘转动至所述第二转动终点位置,包括:
23、控制所述方向盘从所述第二转动补偿位置向所述第二转动终点位置匀速转动。
24、根据本发明的一些实施例,根据所述初始角度与所述第一转动补偿位置确定第一转动终点位置,包括:
25、在所述第一转动补偿位置朝远离所述回正位置的方向将所述方向盘以所述初始角度的数值转动,所述方向盘转动终点的位置为所述第一转动终点位置。
26、根据本发明的一些实施例,所述车辆方向盘回正方法,还包括:
27、当所述初始角度等于0时,结束对所述方向盘的回正。
28、根据本发明第二方面实施例的一种车辆,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现上述的一种车辆方向盘回正方法。
29、该技术方案至少具有如下的有益效果:当车辆需要对方向盘回正时,使用上述的车辆方向盘回正方法,车辆方向盘可在不同环境下实现自动回正,通用性更强,并且在生产开发时不需要进行大量台架试验进行数据积累,直接在使用时通过对方向盘转动力矩的反馈确定对前悬架综合应力的补偿,大幅降低了开发成本,提高生产效益。
30、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行上述的车辆方向盘回正方法。
31、该技术方案至少具有如下的有益效果:上述的车辆方向盘回正方法可被实现为计算机程序,被有形地包含于计算机可读存储介质,当处理器使用此计算机可读存储介质对车辆方向盘回正时,可在不同环境下实现自动回正,通用性更强,并且在生产开发时不需要进行大量台架试验进行数据积累,直接在使用时通过对方向盘转动力矩的反馈确定对前悬架综合应力的补偿,大幅降低了开发成本,提高生产效益。
32、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变
33、得明显,或通过本发明的实践了解到。
技术特征:
1.一种车辆方向盘回正方法,其特征在于:包括:
2.根据权利要求1所述的一种车辆方向盘回正方法,其特征在于:所述车辆方向盘回正方法,还包括:
3.根据权利要求2所述的一种车辆方向盘回正方法,其特征在于:所述车辆方向盘回正方法,还包括:
4.根据权利要求3所述的一种车辆方向盘回正方法,其特征在于:所述根据所述初始角度与所述第二转动补偿位置确定第二转动终点位置,包括:
5.根据权利要求3所述的一种车辆方向盘回正方法,其特征在于:所述控制所述方向盘转动至所述第二转动终点位置,包括:
6.根据权利要求3所述的一种车辆方向盘回正方法,其特征在于:所述控制所述方向盘转动至所述第一转动终点位置,包括:
7.根据权利要求1所述的一种车辆方向盘回正方法,其特征在于:根据所述初始角度与所述第一转动补偿位置确定第一转动终点位置,包括:
8.根据权利要求1所述的一种车辆方向盘回正方法,其特征在于:所述车辆方向盘回正方法,还包括:
9.一种车辆,其特征在于:包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如权利要求1至8任一项所述的一种车辆方向盘回正方法。
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如权利要求1至8任一项所述的车辆方向盘回正方法。
技术总结
本发明公开了一种车辆方向盘回正方法、车辆及储存介质,其中,车辆方向盘回正方法包括:获取方向盘在初始位置时与回正位置之间的角度,记为初始角度;判断初始角度是否等于0;当初始角度不等于0时,控制方向盘向回正位置匀速转动;获取方向盘匀速转动过程中所需要施加的转动力矩;判断转动力矩是否减小;当转动力矩减小时,获取方向盘此时的位置,记为第一转动补偿位置;根据初始角度与第一转动补偿位置确定第一转动终点位置,控制方向盘转动至第一转动终点位置,使得方向盘反转后到达回正位置,本发明可对车辆方向盘在不同环境下实现自动回正,并且在生产开发时不需要进行大量台架试验进行数据积累,大幅降低了开发成本,提高生产效益。
技术研发人员:韩祖康,刘涛
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!