解耦式驱动器与跳跃机器人
本发明涉及跳跃机器人,尤其指一种解耦式驱动器与跳跃机器人。
背景技术:
1、在现有的跳跃机器人中,例如仿生青蛙机器人,通常采用驱动机构来驱动执行机构,以实现跳跃动作。这些机构通常以耦合方式运作,即在驱动机构(例如其内的弹簧)储能的同时,执行机构也会进行同步运动。然而,自然界中的青蛙在准备跳跃时,其腿部(执行机构)并不会因为发力而立即发生形变,而是保持弯曲状态直到跳跃动作开始。
技术实现思路
1、本发明的目的之一是提供一种能够在蓄力过程中与执行机构实现解耦运动的驱动器。
2、为了实现上述目的,本发明采用如下技术方案:解耦式驱动器,包括同轴设置的旋转轮与动力臂,所述旋转轮连接有驱动其旋转的驱动装置,所述旋转轮通过弹性拉伸件与动力臂相连,所述旋转轮沿正方向旋转时能够带动弹性拉伸件进行拉伸,实现蓄能,并在其旋转至预设位置时(也可以理解为,旋转轮旋转至弹性拉伸件与动力臂重叠时),所述弹性拉伸件达到预设的拉伸极限(也即蓄能极限),在所述旋转轮旋转至超过该预设位置后,所述弹性拉伸件能够由拉伸状态转变至收缩回弹状态,实现能量释放,并带动在其拉伸阶段保持不动的动力臂沿反方向转动。
3、进一步地,在所述旋转轮旋转至预设位置之前,所述动力臂与弹性拉伸件之间形成小于零度的夹角;
4、当所述旋转轮旋转至预设位置时,所述动力臂与弹性拉伸件之间形成零度夹角;
5、当所述旋转轮旋转至超过预设位置后,所述动力臂与弹性拉伸件之间形成大于零度的夹角。
6、进一步地,所述旋转轮包括不完全齿轮和设置在不完全齿轮上的摆臂,所述驱动装置包括驱动齿轮和连接驱动齿轮的电机,所述驱动齿轮与不完全齿轮相啮合,所述弹性拉伸件与摆臂相连。
7、进一步地,所述弹性拉伸件为拉簧或橡皮筋或弹力绳。
8、进一步地,上述驱动器还包括机架,所述旋转轮与动力臂同轴设置在机架上,所述动力臂能够在弹性拉伸件拉伸阶段被机架抵住而保持不动。
9、进一步地,所述动力臂的活动端设置有用于抵住机架的凸杆或轴销。
10、本发明的另一目的在于提供一种跳跃机器人,其包括外壳和安装在外壳上的前腿与后腿,还包括安装在外壳上的上述解耦式驱动器,所述后腿可转动安装在外壳上,并能在动力臂沿反方向转动时被其推动而实现跳跃动作。
11、进一步地,所述后腿为多连杆机构。
12、进一步地,所述多连杆机构包括第一连杆和第二连杆,所述第一连杆和第二连杆的上端连接在外壳同一侧的两个位置,所述第一连杆的下端连接有第三连杆,所述第二连杆的下端连接第三连杆的中部,所述第二连杆的中部连接有第四连杆,所述第四连杆的另一端连接有第五连杆,所述第三连杆的另一端连接第五连杆的中部,所述第一连杆用于承受动力臂的推力并带动与之相连的其他连杆进行伸展,使得接触地面的第五连杆蹬地而起,实现跳跃。
13、进一步地,所述外壳上设置有防止后腿在受到动力臂推动时发生过度旋转的限位部。
14、在本发明的解耦式驱动器中,旋转轮在正方向旋转(例如逆时针旋转)时会拉伸弹性拉伸件。当旋转到达预设位置,弹性拉伸件将达到其拉伸极限。一旦旋转超过这个位置,弹性拉伸件将从拉伸状态转变为收缩回弹状态,进而带动原本静止不动的动力臂沿反方向转动(例如顺时针旋转)。这种设计使得在旋转轮带动弹性拉伸件储能的同时,动力臂能够保持静止,直到旋转轮旋转超过预设位置,此时弹性拉伸件的回弹动作才会驱动动力臂运动,实现蓄力过程中的解耦运动。
15、本发明的驱动器能够在蓄力过程中实现与执行机构的解耦运动,确保跳跃机器人在跳跃前能够维持后腿的弯曲状态。这种设计模仿了青蛙在跳跃前腿部保持弯曲的行为,即腿部在实际跳跃动作发生前不会因为发力而立即形变。这样的机制有助于提高跳跃机器人的效率和性能,使其更接近自然界青蛙的跳跃机制。
技术特征:
1.解耦式驱动器,其特征在于:包括同轴设置的旋转轮(1)与动力臂(2),所述旋转轮(1)连接有驱动其旋转的驱动装置,所述旋转轮(1)通过弹性拉伸件(3)与动力臂(2)相连,所述旋转轮(1)沿正方向旋转时能够带动弹性拉伸件(3)进行拉伸,并在其旋转至预设位置时,所述弹性拉伸件(3)达到拉伸极限,在所述旋转轮(1)旋转至超过该预设位置后,所述弹性拉伸件(3)能够由拉伸状态转变至收缩回弹状态,带动在其拉伸阶段保持不动的动力臂(2)沿反方向转动。
2.根据权利要求1所述的解耦式驱动器,其特征在于:
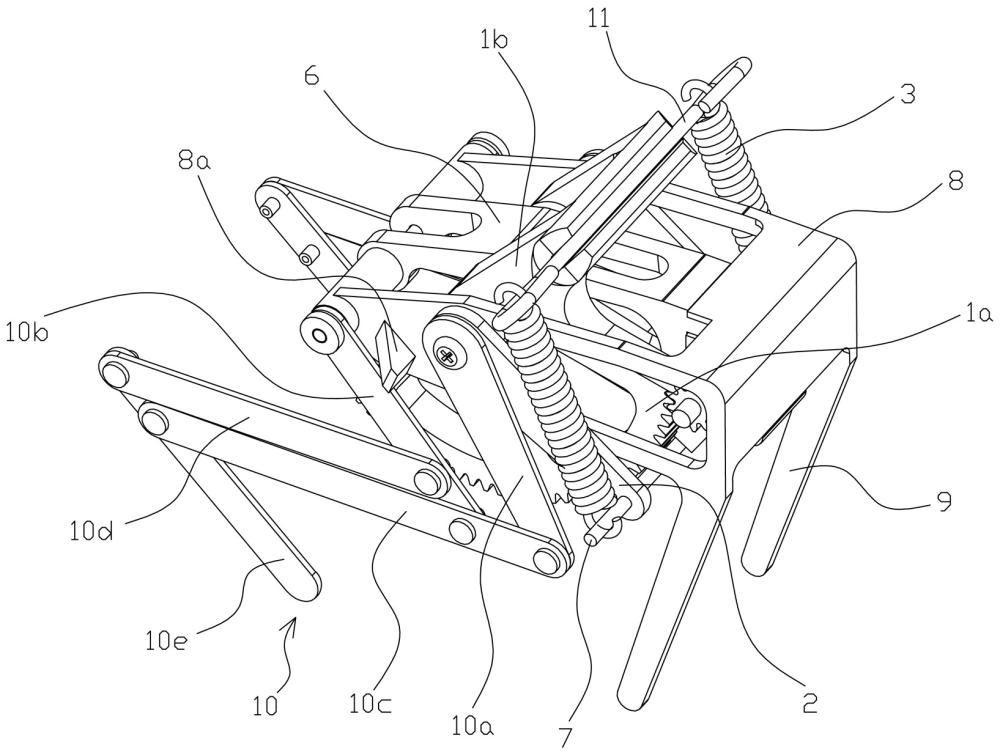
3.根据权利要求1所述的解耦式驱动器,其特征在于:所述旋转轮(1)包括不完全齿轮(1a)和设置在不完全齿轮(1a)上的摆臂(1b),所述驱动装置包括驱动齿轮(4)和连接驱动齿轮(4)的电机(5),所述驱动齿轮(4)与不完全齿轮(1a)相啮合,所述弹性拉伸件(3)与摆臂(1b)相连。
4.根据权利要求1所述的解耦式驱动器,其特征在于:所述弹性拉伸件(3)为拉簧或橡皮筋或弹力绳。
5.根据权利要求1所述的解耦式驱动器,其特征在于:包括机架(6),所述旋转轮(1)与动力臂(2)同轴设置在机架(6)上,所述动力臂(2)能够在弹性拉伸件(3)拉伸阶段被机架(6)抵住而保持不动。
6.根据权利要求5所述的解耦式驱动器,其特征在于:所述动力臂(2)的活动端设置有用于抵住机架(6)的凸杆或轴销(7)。
7.跳跃机器人,包括外壳(8)和安装在外壳(8)上的前腿(9)与后腿(10),其特征在于:还包括安装在外壳(8)上的权利要求1-6中任意一项所述的解耦式驱动器,所述后腿(10)可转动安装在外壳(8)上,并能在动力臂(2)沿反方向转动时被其推动而实现跳跃动作。
8.根据权利要求7所述的跳跃机器人,其特征在于:所述后腿(10)为多连杆机构。
9.根据权利要求8所述的跳跃机器人,其特征在于:所述多连杆机构包括第一连杆(10a)和第二连杆(10b),所述第一连杆(10a)和第二连杆(10b)的上端连接在外壳(8)同一侧的两个位置,所述第一连杆(10a)的下端连接有第三连杆(10c),所述第二连杆(10b)的下端连接第三连杆(10c)的中部,所述第二连杆(10b)的中部连接有第四连杆(10d),所述第四连杆(10d)的另一端连接有第五连杆(10e),所述第三连杆(10c)的另一端连接第五连杆(10e)的中部,所述第一连杆(10a)用于承受动力臂(2)的推力并带动与之相连的其他连杆进行伸展,使得接触地面的第五连杆(10e)蹬地而起,实现跳跃。
10.根据权利要求7所述的跳跃机器人,其特征在于:所述外壳(8)上设置有防止后腿(10)在受到动力臂(2)推动时发生过度旋转的限位部(8a)。
技术总结
解耦式驱动器与跳跃机器人,涉及跳跃机器人技术领域。该解耦式驱动器包括同轴设置的旋转轮与动力臂,旋转轮连接有驱动其旋转的驱动装置,旋转轮通过弹性拉伸件与动力臂相连,旋转轮沿正方向旋转时能够带动弹性拉伸件进行拉伸,并在其旋转至预设位置时,弹性拉伸件达到拉伸极限,在旋转轮旋转至超过该预设位置后,弹性拉伸件能够由拉伸状态转变至收缩回弹状态,带动在其拉伸阶段保持不动的动力臂沿反方向转动。本发明能够在蓄力过程中与执行机构实现解耦运动。
技术研发人员:邱飒蔚,叶拓,郭鹏程,夏二立,孙龙涛,罗靖,邱岱峰,田毅然,李子文,吴长平
受保护的技术使用者:湖南工学院
技术研发日:
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!