一种磁吸驱动轮组和磁吸附攀爬机器人的制作方法
本申请涉及磁吸机器人,尤其涉及一种磁吸驱动轮组和磁吸附攀爬机器人。
背景技术:
1、磁吸附技术可以利用磁铁来固定和移动物体,在众多领域中都得到了广泛应用,比如,磁悬浮列车以及磁吸附攀爬机器人等。
2、轮式机器人作为常见的移动机器人,在平坦或者较为平坦的表面上可以实现快速移动,具有较好的机动性,结合磁吸附技术可以使得轮式机器人在非水平表面上运动,但轮式机器人在非平坦表面上的移动较为困难,尤其在翻越内折角平面时,翻越能力较弱,容易翻车。
技术实现思路
1、有鉴于此,本申请提供一种磁吸驱动轮组和磁吸附攀爬机器人,用以提高磁吸附攀爬机器人在非平坦表面的移动能力,尤其提高其翻越内折角平面的能力。
2、具体地,本申请是通过如下技术方案实现的:
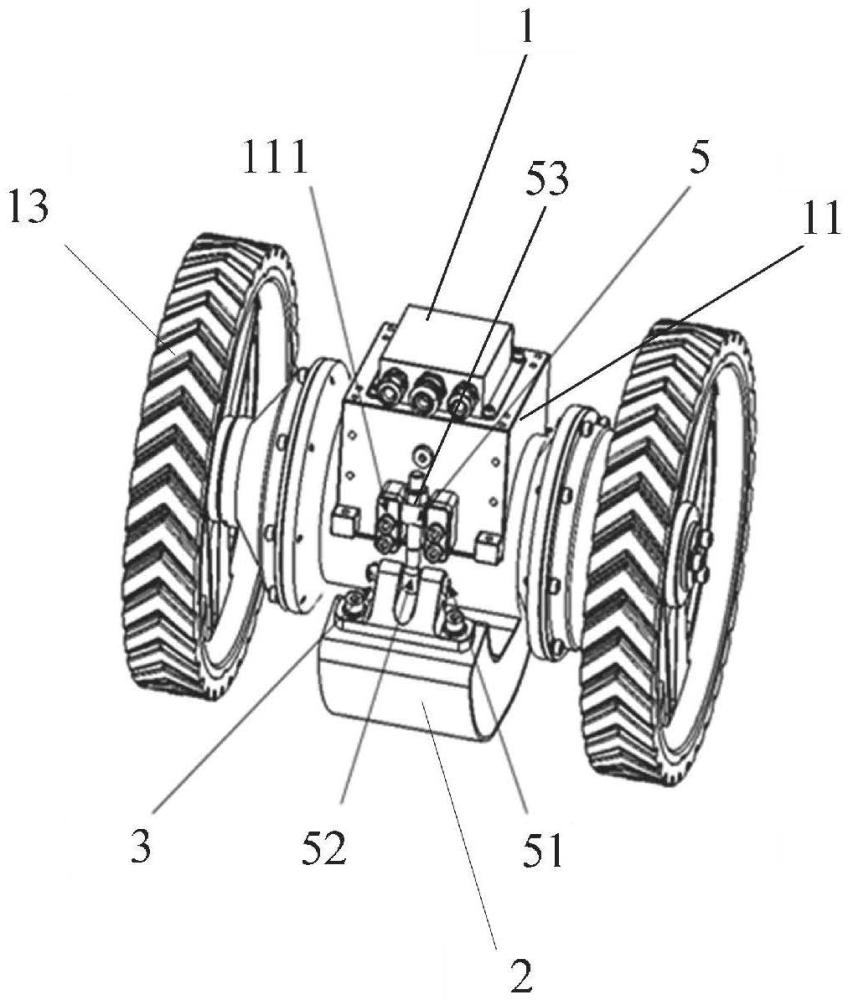
3、本申请第一方面提供一种磁吸驱动轮组,所述磁吸驱动轮组包括驱动轮组和磁铁组件;其中,
4、所述驱动轮组包括舱体、安装在所述舱体内的驱动电机组件、以及安装在所述舱体两侧、由所述驱动电机组件驱动的一组轮子;
5、所述磁铁组件以围绕所述舱体的方式安装在所述舱体朝向地面的一侧;所述磁铁组件用于提供磁吸功能,以增强所述磁吸驱动轮组在铁磁性材料表面上的附着力;
6、所述磁铁组件为弧形磁铁;所述磁铁组件沿前进方向的长度大于所述舱体沿前进方向的长度;在所述磁铁组件安装在所述舱体上后,所述磁铁组件位于车轴前边的第一部分的弧度与所述轮子的弧度不一致;所述磁铁组件位于车轴后边的第二部分的弧度与所述轮子的弧度一致;所述第一部分在竖直方向上的高度高于所述第二部分在竖直方向上的高度,且所述第一部分的弧度大于所述第二部分的弧度;其中,通过所述第一部分和所述第二部分的弧度变化和高度变化,该磁吸驱动轮组在翻越内折角时能够实现平滑过渡。
7、本申请第二方面提供一种磁吸附攀爬机器人,所述磁吸附攀爬机器人包括本申请第一方面提供的任一磁吸驱动轮组。
8、本申请提供的一种磁吸驱动轮组和磁吸附攀爬机器人,通过设置驱动轮组和磁铁组件,并在驱动轮组上设置舱体、安装在舱体内的驱动电机组件、以及安装在舱体两侧、由所述驱动电机组件驱动的一组轮子,以及令磁铁组件以围绕所述舱体的方式安装在所述舱体朝向地面的一侧,并将所述磁铁组件设置为弧形磁铁,且令所述磁铁组件沿前进方向的长度大于所述舱体沿前进方向的长度,并在所述磁铁组件安装在所述舱体上后,使所述磁铁组件位于车轴前边的第一部分的弧度与所述轮子的弧度不一致,所述磁铁组件位于车轴后边的第二部分的弧度与所述轮子的弧度一致,所述第一部分在竖直方向上的高度高于所述第二部分在竖直方向上的高度,且所述第一部分的弧度大于所述第二部分的弧度,这样,通过将第一部分的弧度、高度设计的较大,第二部分的弧度、高度设计的较小,在跨越内折角时,可以使得磁吸驱动轮组的重心向前偏移,进一步的,由于第一部分的弧度和高度均较大,可以使轮组在刚接触内折角时,使该轮组的前端贴合该内折角平面的前斜面,以提高对该前斜面的磁吸力和正压力,帮助车体保持稳定,顺滑翻越内折角平面,此外,由于第二部分的弧度和高度均较小,可以确保在翻越内折角的过程中能够提供持续稳定的磁吸力,保证轮子与表面的贴合度和摩擦力,并在轮组逐渐跨越内折角回到平滑面时,能迅速恢复正常的磁吸力,以确定翻越的顺畅过渡,减少卡顿或抖动。
9、此外,本申请提供的磁吸驱动轮组,通过在弧形磁铁朝向前进方向的前端设置有前铰支座,在弧形磁铁朝向前进方向的后端设置有后铰支座,进而在所述舱体朝向前进方向的前端设置第一连接件,所述舱体朝向前进方向的后端设置有第二连接件,并将所述前铰支座与第一连接件转动连接,将所述后铰支座通过调高组件与所述第二连接件连接,这样,在磁吸驱动轮组遇到障碍物时,调高组件允许磁铁组件随障碍物的高度变化自动调整高度,这样,第一方面,使得磁铁能够依然贴近铁磁性表面,避免因为高度差异而失去吸附力,可以增强该磁吸驱动轮组在复杂地形上的通过性,第二方面,通过前后铰支座的旋转连接和调高组件的调节作用,磁铁组件在面对障碍物时能够快速适应其形状和高度变化,帮助轮组顺利翻越障碍物,第三方面,通过高度的自适应调整,可以有效缓冲磁铁组件与障碍物或不规则表面之间的直接碰撞,减少因硬碰硬造成的磨损和冲击,有效延长磁铁组件的使用寿命。
技术特征:
1.一种磁吸驱动轮组,其特征在于,所述磁吸驱动轮组包括驱动轮组和磁铁组件;其中,
2.根据权利要求1所述的磁吸驱动轮组,其特征在于,所述弧形磁铁朝向前进方向的前端设置有前铰支座,所述弧形磁铁朝向前进方向的后端设置有后铰支座;其中,
3.根据权利要求2所述的磁吸驱动轮组,其特征在于,所述调高组件包括圆柱销、活节螺栓、螺母;所述圆柱销穿过所述活节螺栓的开孔,并与所述后铰支座转动连接;所述活节螺栓的螺纹端穿过所述第二连接件上的开孔,所述螺母套设在所述活节螺栓位于所述第二连接件上方的螺纹端上,以调节并锁定所述活节螺栓相对于所述第二连接件的位置。
4.根据权利要求1所述的磁吸驱动轮组,其特征在于,所述驱动电机组件包括第一电机和第二电机;其中,
5.根据权利要求1所述的磁吸驱动轮组,其特征在于,所述驱动电机组件包括一个电机。
6.根据权利要求1所述的磁吸驱动轮组,其特征在于,所述磁铁组件为弧形磁铁,所述弧形磁铁的包角大于90°、且不超过180°。
7.根据权利要求6所述的磁吸驱动轮组,其特征在于,所述磁铁组件包括磁铁和包覆在所述磁铁外面的外壳。
8.根据权利要求4所述的磁吸附驱动轮组,其特征在于,所述舱体包括中间腔体、以及盖设在所述中间腔体两侧的两个输出端盖;其中,
9.一种磁吸附攀爬机器人,其特征在于,所述磁吸附攀爬机器人包括权利要求1-8任一项所述的磁吸驱动轮组。
10.根据权利要求9所述的磁吸附攀爬机器人,其特征在于,所述磁吸附攀爬机器人能够用于船体清洗领域。
技术总结
本申请提供一种磁吸驱动轮组和磁吸附攀爬机器人。本申请提供的磁吸驱动轮组,包括驱动轮组和磁铁组件;驱动轮组包括舱体、安装在舱体内的驱动电机组件、以及安装在舱体两侧、由驱动电机组件驱动的一组轮子;磁铁组件以围绕舱体的方式安装在舱体朝向地面的一侧;磁铁组件为弧形磁铁;磁铁组件沿前进方向的长度大于舱体沿前进方向的长度;在磁铁组件安装在舱体上后,磁铁组件位于车轴前边的第一部分的弧度与轮子的弧度不一致;磁铁组件位于车轴后边的第二部分的弧度与轮子的弧度一致;第一部分在竖直方向上的高度高于第二部分在竖直方向上的高度,且第一部分的弧度大于第二部分的弧度。本申请提供的磁吸驱动轮组,翻越内折角平面的能力较强。
技术研发人员:孙长瑞,刘海龙,及翔,任路畅,吴迪,凡东方,刘彦雨,许华旸,蒲婷
受保护的技术使用者:北京史河科技有限公司
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!